Downloaded 28 times


![ADMMの概要(4/4)
• 収束定理(大域的収束性)
– 𝑓, 𝑔 に与える制約や 𝜌 𝑘 の違いなどにより多数のヴァリエーションが存在
– ここでは、次の条件を仮定する:
1. 𝑓: ℝ 𝑛
→ ℝ, 𝑔: ℝ 𝑛
→ ℝ はそれぞれプロパー1かつ下半連続2な最小値をもつ凸関数
2. 任意の 𝑘 ∈ ℕ について 𝜌 𝑘 = 𝜌 > 0
– 仮定のもとで次の定理が成り立つ[2]
8
1 定義域が空ではない i.e. dom 𝑓 ≠ ∅
2 任意の𝑥0 ∈ dom 𝑓について𝑓 𝑥0 ≤ liminf
𝑥→𝑥0
𝑓 𝑥
3 𝑓∗ −𝑢 + 𝑔∗(𝑢/𝜆) : 関数 𝑓 𝑥 + 𝜆𝑔(𝑥) の凸共役
残差収束 : 𝑘 → ∞ のとき 𝑥 𝑘
− 𝑣 𝑘
→ 0
目的収束 : 𝑘 → ∞ のとき 𝑓 𝑥 𝑘
+ 𝜆𝑔 𝑣 𝑘
→ min
𝑥, 𝑣
𝑓 𝑥 + 𝜆𝑔 𝑣 s. t. 𝑥 = 𝑣
双対変数収束3 : 𝑘 → ∞ のとき 𝑢 𝑘
→ argmin 𝑢 𝑓∗
−𝑢 + 𝑔∗
(𝑢/𝜆)](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-9-320.jpg)
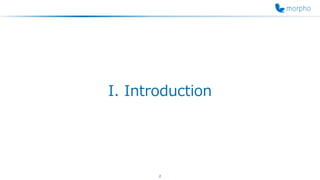
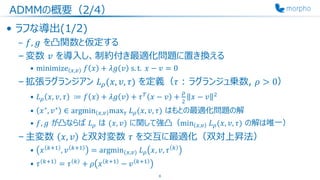
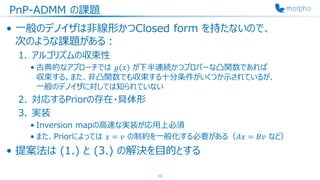
![Plug-and-Play Schemeの概要(2/3)
• Plug-and-Play Schemeの基本的なアイディア
– Prior と Prox の因果関係を逆転
• Plug-and-Play ADMM(PnP-ADMM)[3]
– ℱ, 𝒟 はユーザが定義する写像
– 尤度関数とPriorはそれぞれ ℱ, 𝒟 から implicit に導かれるものとして扱う
10
初期値 𝑥 0 , 𝑣 0 , 𝑢 0 を設定する。
以下の更新式を停止条件が満たされるまで反復:
𝑥 𝑘+1
= ℱ 𝑣 𝑘
− 𝑢 𝑘
𝑣 𝑘+1
= 𝒟 𝑥 𝑘+1
+ 𝑢 𝑘
𝑢(𝑘+1)
= 𝑢 𝑘
+ 𝑥 𝑘+1
− 𝑣 𝑘+1
通常のADMM: Prior を定義 → 対応する Prox が定まる
Plug-and Play Scheme: Prox を定義 → 対応する Prior が定まる](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-11-320.jpg)
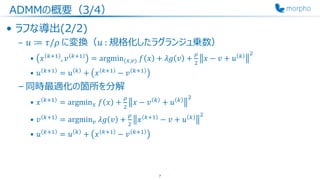
![Plug-and-Play Schemeの概要(3/3)
• ノイズ除去アルゴリズムとしての Prox
– ADMMの正則化項 𝑔 には画像を滑らかにする Prior を選ぶことが多い
• TV正則化やTikhonov 正則化など
– つまり、𝑔 に対応する Prox はノイズ除去の作用をもつと解釈できる
• 例えば、Tikhonov 正則化 𝑔 𝑣 = 𝑄𝑣 2
2
(𝑄 は畳み込み行列)
に対応する Prox は Wienerフィルタ[4; Theorem 3.1]
– この類推より、PnP-ADMM の写像 𝒟 をノイズ除去アルゴリズム
(デノイザ)と呼ぶ
• 既存のデノイザを柔軟に組み込めるメリット
• 先行研究ではNon-local means、 BM3D、K-SVD, TVなどが
用いられている[3,5,6]
11](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-12-320.jpg)

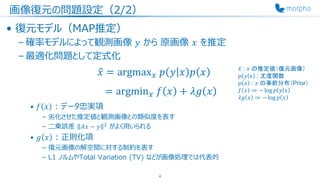
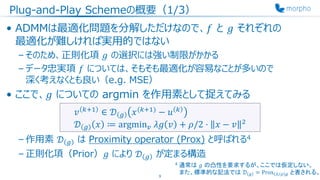
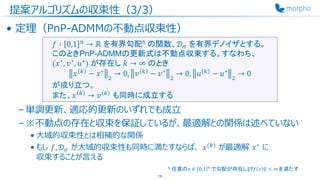
![提案アルゴリズムの収束性(1/3)
• 非拡大デノイザ(Non-expansive denoiser)
– 伝統的なADMMの収束定理ではデノイザの非拡大性が必要
• 非拡大写像 𝒟 𝜎: ∀𝑥 ∀𝑦 ∃𝜅 ∈ 0,1 𝒟 𝜎 𝑥 − 𝒟 𝜎 𝑦 ≤ 𝜅‖𝑥 − 𝑦‖
• 言い換えれば リプシッツ定数 ≤ 1
– 任意の 𝑥, 𝑦 のペアで成り立つ必要があるため、証明は難しい
• 一般のデノイザに求める性質としては制約が強すぎる
• 直感的に非拡大に見えるアルゴリズムでも反例が見つかる場合がある(e.g. NLM)
16
NLMの反例(𝜅 = 1.1775)
引用:[1; Fig. 10]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-17-320.jpg)
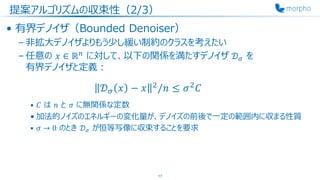
![停止条件
• 変数 𝑥 𝑘
, 𝑣 𝑘
, 𝑢 𝑘
の相対残差を基準
– 論文では二種類提案(tol: 許容誤差)
1. 相対残差の和(Δ 𝑘+1 ≤ tol)
2. 相対残差の最大値(max 𝜀1, 𝜀2, 𝜀3 ≤ tol/3)
– 𝜀1 ≔ 𝑥 𝑘+1 − 𝑥 𝑘
2
/ 𝑛,
– 𝜀2 ≔ 𝑣 𝑘+1 − 𝑣 𝑘
2
/ 𝑛,
– 𝜀3 ≔ 𝑢 𝑘+1 − 𝑢 𝑘
2
/ 𝑛
• tol を極端に小さくする必要はない
– 経験的に tol ≈ 10−3
程度で十分
19
※実験のデノイザはBM3Dを使用
引用:[1; Fig. 1]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-20-320.jpg)
![初期パラメータ 𝜌0
• 調整が必要だが、𝜌0 ∈ 10−5
, 10−2
程度でうまくいく
– 右図は 𝜌0 ∈ [10−4
, 100
] の振る舞い
• 赤:オリジナル、青:単調、黒:適応的
• オリジナルのPnP-ADMMと比較:
– 広い範囲の 𝜌0 で動作する
• オリジナルは𝜌0 = 1 でベストを達成、
𝜌0 ≤ 10−2
で非常に悪化
– チューニングを行えば必ずオリジナルよりも
高いPSNRを達成可能
• オリジナルは提案法で 𝛾 𝑘 = 1 とした
特殊ケースに対応
20
※実験のデノイザはBM3Dを使用
引用:[1; Fig. 3]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-21-320.jpg)
![初期画像
• 初期値 𝑥(0)
, 𝑣 0
, 𝑢 0
は最終的なPSNRに
あまり影響を与えない
– 0,1 𝑛
の一様分布に従う 𝑥 0
を100個
使って実験(右図)
• 𝑣 0
= 𝑥 0
, 𝑢 0
= 0
– 極限での標準偏差は 0.0059 dB
• PSNRは99.7%(3シグマ)の確率で
平均から ±0.0176 dB の範囲に収まる
21
※実験のデノイザはBM3Dを使用
引用:[1; Fig. 3]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-22-320.jpg)
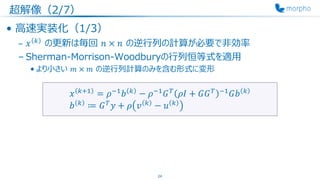
![超解像(3/7)
• 高速実装化(2/3)
– 結局 𝜌𝐼 + 𝐺𝐺 𝑇 −1
の計算は避けられない
– 𝐺𝐺 𝑇
= 𝑆𝐻𝐻 𝑇
𝑆 𝑇
は アップサンプル-フィルタ-ダウンサンプルの構造
→ ポリフェーズ分解が可能
• アップサンプル → フィルタの処理をフィルタ → アップサンプルの順に入れ替え可能
– この関係は novel identity と呼ばれる
• フィルタ長を短くできるメリット
25
෩𝐻 𝑘 𝑧 : 𝐻𝐻 𝑇 に対応するフィルタ(z-domain)
↑ 𝐾 : アップサンプラ
↓ 𝐾 : ダウンサンプラ
引用:[1; Fig. 5]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-26-320.jpg)
![超解像(4/7)
• 高速実装化(3/3)
– 𝑥 𝑘
の更新式の比較
• 青:共役勾配法による解法(反復法)
• 赤 : 高速実装(Closed form)
• 横軸:共役勾配法の反復回数
– 高速実装版はFourierドメインで
フィルタリング
26
引用:[1; Fig. 6]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-27-320.jpg)
![超解像(5/7)
• 実験A: グレースケール超解像
– 右上図の10枚の画像をGTとする
• サイズ 256x256 or 512x512
– デノイザはBM3D
– 4パターンの設定で実験(右下表)
• 𝐻 は bicubic or ガウスボケ
• 𝐾 : サンプリングファクタ
27
引用:[1; Fig. 7]
引用:[1, Table 1]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-28-320.jpg)
![超解像(6/7)
• 実験Aの結果
– パッチベースや
NNベースと比較しても
良好な結果
– 適応的更新よりも
単調更新のほうが
若干良いPSNR
28
Ours-M : 単調更新
Ours-A : 適応的更新
Ours-M* : 単調更新、復元モデルの
𝐻 をbicubic とする
引用:[1, Table 2]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-29-320.jpg)
![超解像(7/7)
• 実験B: カラー画像超解像
– デノイザ:BM3D
– 他手法と比べてわずかに
エッジがシャープ
– ハロー効果も少なく見える
– DCNNにPSNRで劣っている
• train-freeアルゴリズムなので
仕方ない一面はある
29
引用:[1; Fig. 8]](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-30-320.jpg)
![Reference
• [1] S. H. Chan, X. Wang, and O. A. Elgendy, “Plug-and-Play ADMM for Image Restoration: Fixed
Point Convergence and Applications,” arXiv:1605.01710[cs], Nov. 2016.
• [2] S. Boyd, “Distributed Optimization and Statistical Learning via the Alternating Direction Method of
Multipliers,” FNT in Machine Learning, vol. 3, no. 1, pp. 1–122, 2010.
• [3] S. V. Venkatakrishnan, C. A. Bouman, and B. Wohlberg, “Plug-and-Play priors for model based
reconstruction,” in 2013 IEEE Global Conference on Signal and Information Processing, Austin, TX,
USA, 2013, pp. 945–948.
• [4] A. Murli, L. D'Amore and V. De Simone, "The Wiener filter and regularization methods for image
restoration problems," Proceedings 10th International Conference on Image Analysis and Processing,
Venice, Italy, 1999, pp. 394-399, doi: 10.1109/ICIAP.1999.797627.
• [5] A. Rond, R. Giryes, and M. Elad, “Poisson Inverse Problems by the Plug-and-Play scheme,”
arXiv:1511.02500[cs, math], Nov. 2015.
• [6] S. Sreehari, S. V. Venkatakrishnan, B. Wohlberg, L. F. Drummy, J. P. Simmons, and C. A.
Bouman, “Plug-and-Play Priors for Bright Field Electron Tomography and Sparse Interpolation,” IEEE
Trans. Comput. Imaging, pp. 1–1, 2016.
30](https://image.slidesharecdn.com/20200608morphotechblog-200608004446/85/Plug-and-Play-ADMM-31-320.jpg)

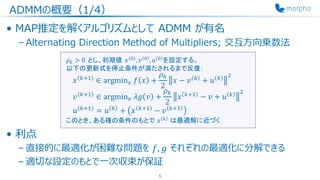
今回は、最適化アルゴリズムとノイズ除去アルゴリズムを組み合わせた非線形画像復元のフレームワークを紹介します。 画像復元とは、劣化した観測画像からクリーンな未知の原画像を推定するタスクであり、ボケ除去や超解像、インペインティングなど幅広い問題を内包しています。 一般に、観測画像は原画像の情報を十分に持っていないので、原画像の推定は劣決定となり解が一意に定まりません。 そのため、原画像に関する事前知識(Prior)を与えた最適化問題として画像復元を定式化し、解空間に制約を与えることがよく行われます。 制約付き最適化問題の解放として、ADMM(Alternating Direction Method of Multipliers; 交互方向乗数法)が有名です。 ADMMは非 Deep Learning 系の反復アルゴリズムの一種であり、もとの問題を複数の小さな部分問題に分割し順番に更新することで最適化を実現します。 また、部分問題が単純であれば一次収束が保証されるメリットがあります。 ------------------ Morpho, Inc. Website: https://www.morphoinc.com/ Tech Blog: https://techblog.morphoinc.com/

![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]GQNと関連研究,世界モデルとの関係について](https://cdn.slidesharecdn.com/ss_thumbnails/20180817-180827085537-thumbnail.jpg?width=640&height=640&fit=bounds)




























