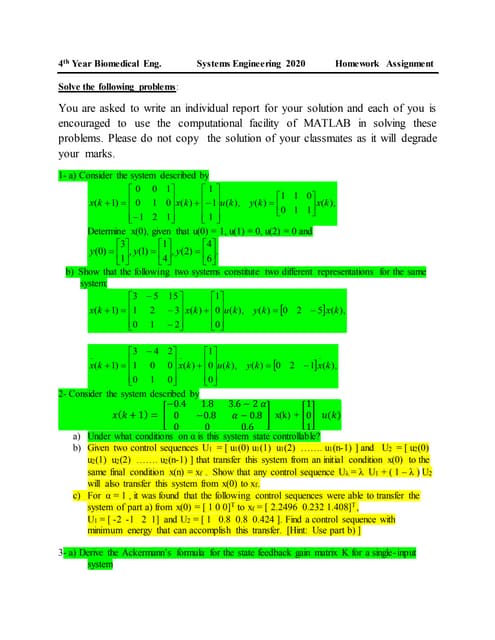
This document analyzes and models a rotational mechanical system to determine its time domain characteristics. The system is modeled using a second-order differential equation and Laplace transform. MATLAB is used to verify results and simulate the system. Key findings include:
1) The system has poles at -8 ± j20, a damping ratio of 0.3714, and 28.46% overshoot.
2) The impulse and step responses are determined and match simulations in MATLAB.
3) A state space model is developed using A, B, C, and D matrices to reduce the system to first-order equations.





![5 | P a g e
Table 4: Laplace Transformations of the Unit Step and Generic Oscillatory Decaying Functions
By takinga lookat (4) and (5),we see that all we needtoacquire the desiredform(inTable 3) isa 20 in
the numerator;therefore we performthe followingmanipulations:
0.5
𝑠2+16𝑠+464
→
40
40
∗
0.5
𝑠2+16𝑠+64+464−64
→
1
40
∗
20
(𝑠+8)2+202
Using(16) inconjunctionwithTable 3, the impulse response of the systemis,
𝜃( 𝑡) =
𝑒−8𝑡sin(20𝑡)
40
Equation(17) isa representationof how thisparticularrotational mechanical systembehaveswhena
unitimpulse torque isapplied.
Part4 – Step Response
Findingthe stepresponse requiresthatwe convertourtransferfunctiontothe time domainusingTable
4. To do so however,the transferfunctionof the systemmustbe directlyinfluencedbyastepresponse.
Since addinginthe time domainequatestomultiplyinginthe frequencydomain,togetthe step
response of the system,we simplymultiplythe transferfunctionbythe unitinputstep(T).
0.5
𝑠2+16𝑠+464
∗
100
𝑠
=
50
𝑠∗[(𝑠+8)2+202]
To findthe valuesthatwe needforthe equationsinTable 4, we mustexpand(18) througha process
calledpartial fractionexpansion. Thisallowsustodetermine the coefficients thatcharacterize our
system’sstepresponse.
𝐴
𝑠
+
𝐵𝑠 + 𝐶
(𝑠 + 8)2 + 202
Usingthe brute force method,
𝐴𝑠2 + 𝐴 ∗ 16𝑠 + 𝐴 ∗ 464 + 𝐵𝑠2 + 𝐶𝑠 = 50
(16)
(17)
(18)
(19)
(20)](https://image.slidesharecdn.com/87c8ea04-245f-4d94-ba84-3aaa91d846f8-160516085841/85/Lab-3-6-320.jpg)
![6 | P a g e
464 ∗ 𝐴 = 50 → 𝐴 = 0.10776
𝐴𝑠2 + 𝐵𝑠2 = 0 → −𝐴 = 𝐵 = −0.10776
16𝑠 ∗ 𝐴 + 𝐶𝑠 = 0 → −16𝐴 = 𝐶 = −1.7241
Equation(19) isthe general expandedformof (18). Knowingthat 𝑎 = 8 and 𝜔 𝑑 = 20 fromequation
(19) and Table 4, alongwiththe resultsfrom(20-23), the stepresponse becomes:
𝜃( 𝑡) = 0.10776 + 𝑒−8𝑡[−0.10776 ∗ cos(20𝑡) − 0.0431 ∗ sin(20𝑡)]
Part5 – StateSpaceModel
In orderto reduce the second-ordersystemdowntoa first-ordersystemof linearequations,we must
construct the state space model of the system.
To begin,we declare ourstate variables:
𝑞1 = 𝜃
𝑞2 = 𝜃̇
Therefore,equation(1) becomes:
𝐽𝑞̇2 + 𝐷𝑞2 + 𝐾𝑞1 = 𝑇
From equations(25-27),we can see that,
𝑞̇1 = 𝑞2
𝑞̇2 =
𝑇 − 𝐾𝑞1 − 𝐷𝑞2
𝐽
Now,before we beginconstructingoursystemmatrices,we mustfirstwrite outthe equationsforthe
system’soutputs.
Knowingthatour outputsinclude the angulardisplacement (𝜃) andangularacceleration (𝜃̈),the
system’soutputequationsbecome:
𝑦1 = 𝑞1
𝑦2 = 𝑞̇2
Withequations(25-31),we may begintoconstruct our A,B, C and D matrices.
(21)
(22)
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
(31)](https://image.slidesharecdn.com/87c8ea04-245f-4d94-ba84-3aaa91d846f8-160516085841/85/Lab-3-7-320.jpg)
![7 | P a g e
Our A matrix isdefinedasthe systemmatrix andrelatesthe state variablestothe derivativesof the
state variable. The equationsusedtofill the A matrix are shownin(28) and(29).
A becomes:
𝐴 = [
0 1
−
𝐾
𝐽
−
𝐷
𝐽
] = [
0 1
−464 −16
]
Our B matrix isdefinedasthe matrix thatrelatesthe state variablesof the systemtothe inputof the
system. The equationsusedtofill the Bmatrix are alsoshown in(28) and(29).
B becomes:
𝐵 = [
0
1
𝐽
] = [
0
0.5
]
Our C matrix isdefinedasthe matrix thatrelatesthe system’sstate variablestothe outputof the
system. The equationsusedtofill the Cmatrix are shownin(30) and (31).
C becomes:
𝐶 = [
1 0
−
𝐾
𝐽
−
𝐷
𝐽
] = [
0 1
−464 −16
]
Our D matrix isdefinedasthe matrix thatrelatesthe outputsof the systemto itsgiveninput. The
equationsusedtofill the Dmatrix are also giveninequations(30) and(31).
D becomes:
𝐷 = [
0
1
𝐽
] = [
0
0.5
]
Withequations(32-35),we may constructour state space representationof the system.
The state space model becomes:
[
𝑞̇1
𝑞̇2
] = 𝐴 ∗ [
𝑞1
𝑞2
] + 𝐵 ∗ 𝑇
[
𝑦1
𝑦2
] = 𝐶 ∗ [
𝑞1
𝑞2
] + 𝐷 ∗ 𝑇
Withnumbers,
[
𝑞̇1
𝑞̇2
] = [
0 1
−464 −16
] [
𝑞1
𝑞2
] + [
0
0.5
] 𝑇
[
𝑦1
𝑦2
] = [
1 0
−464 −16
][
𝑞1
𝑞2
] + [
0
0.5
] 𝑇
(32)
(33)
(34)
(35)
(38)
(39)
(36)
(37)](https://image.slidesharecdn.com/87c8ea04-245f-4d94-ba84-3aaa91d846f8-160516085841/85/Lab-3-8-320.jpg)






![14 | P a g e
Part2 – SystemCharacteristics
Using(43) and(44) withTables1 and2, alongwithequation(14),our systemcharacteristicsbecome:
𝜔 𝑛 = √450
𝜔 𝑑 = ±15
𝜏 = 0.067
𝑡 𝑠 = 0.267
𝑡 𝑝 = 0.209
𝜁 = 0.707
𝑡 𝑟 = 0.100
%𝑂𝑆 = 4.32%
Part3 – ImpulseResponse
By takinga lookat (43), we see that all we need todo to acquire the desiredform inTable 3 isa 15 in
the numerator;therefore we performthe followingmanipulationstoacquire the impulse response:
0.5
𝑠2+30𝑠+450
→
30
30
∗
0.5
𝑠2+30𝑠+225+450−225
→
1
30
∗
15
(𝑠+15)2+152
Using(53) inconjunctionwithTable 3,the impulse response of the systembecomes,
𝜃( 𝑡) =
𝑒−15𝑡sin(15𝑡)
30
Part4 – Step Response
To get the step response of the system,we simplymultiplythe transferfunctionbythe unitinputstep.
0.5
𝑠2+30𝑠+450
∗
100
𝑠
=
50
𝑠∗[(𝑠+15)2+152]
Then,we mustexpand(55) througha processcalledpartial fractionexpansion,allowingustodetermine
the coefficientsthatcharacterize oursystem’sstepresponse.
𝐴
𝑠
+
𝐵𝑠 + 𝐶
(𝑠 + 15)2 + 152
Usingthe brute force method,
𝐴𝑠2 + 𝐴 ∗ 30𝑠 + 𝐴 ∗ 450 + 𝐵𝑠2 + 𝐶𝑠 = 50
(46)
(47)
(48)
(49)
(50)
(45)
(51)
(52)
(53)
(54)
(56)
(57)
(55)](https://image.slidesharecdn.com/87c8ea04-245f-4d94-ba84-3aaa91d846f8-160516085841/85/Lab-3-15-320.jpg)
![15 | P a g e
450 ∗ 𝐴 = 50 → 𝐴 = 0.111
𝐴𝑠2 + 𝐵𝑠2 = 0 → −𝐴 = 𝐵 = −0.111
30𝑠 ∗ 𝐴 + 𝐶𝑠 = 0 → −30𝐴 = 𝐶 = −3.33
Equation(56) isthe general expandedformof (55).Knowingthat 𝑎 = 15 and 𝜔 𝑑 = 15 fromequation
(56) and Table 4, alongwiththe resultsfrom(58-60), the stepresponse becomes:
𝜃( 𝑡) = 0.111 − 𝑒−15𝑡[0.111 ∗ cos(15𝑡) + 0.333 ∗ sin(15𝑡)]
Part5 – Analysis
By makingthe necessarychangestothe followingscript,we canverifythe datafor our new system.
As youcan see by lookingatFig.13, the polesoccurat -15±j15 as expected. Also,youcansee that the
dampingratiois0.707 and the percentovershootis4.32%, all of whichhappentobe consistentwiththe
calculatedvaluesobtainedinequations(44),(50) and (52).
Applyingthe scriptandsolvingforthe impulseresponsegivesus:
(58)
(59)
(60)
(61)
Figure 13: Pole-Zero Map of the Newly DesignedSystem
(62)](https://image.slidesharecdn.com/87c8ea04-245f-4d94-ba84-3aaa91d846f8-160516085841/85/Lab-3-16-320.jpg)



![19 | P a g e
References
http://www.engr.uky.edu/~donohue/ee211/ee211_9.pdf [1]
Appendix
Tables
Name Page(s)
Table 1: DeterminingSystemCharacteristics 3
Table 2: DeterminingRise Time 4
Table 3: Laplace Transformationsof the UnitImpulse andDecayingSine Functions 4
Table 4: Laplace Transformationsof the UnitStepand GenericOscillatoryDecayingFunctions 5
Figures
Name Page(s)
Figure 1: Model of a Rotational Mechanical System 2
Figure 2: Pole-ZeroMapof SystemH 8
Figure 3: TransferFunctionBlockDiagramModel of a Rotational Mechanical System 9
Figure 4: StepInputversusSystemOutput 9
Figure 5: Impulse InputversusSystemOutput 10
Figure 6: SystemOutputs 10
Figure 7: Mathematical BlockDiagramfor a Rotational Mechanical System 11
Figure 8: Rotational Mechanical SystemAngularDisplacementStepResponse 11
Figure 9: Mathematical BlockDiagram – Scope at DifferentOutput 12
Figure 10: AngularAccelerationStepResponse fromMathBasedBlockDiagram 12
Figure 11: TransferFunctionBlockDiagramwithAdditionalOutputs 12
Figure 12: AngularAccelerationStepResponse fromTransferFunctionBlockDiagram 13
Figure 13: Pole-ZeroMapof the NewlyDesignedSystem 15
Figure 14: TransferFunctionBlockDiagramforthe RedesignedSystem 16
Figure 15: StepResponse of the NewlyDesignedSystem 16
Figure 16: Impulse Response of the NewlyDesignedSystem 17](https://image.slidesharecdn.com/87c8ea04-245f-4d94-ba84-3aaa91d846f8-160516085841/85/Lab-3-20-320.jpg)

![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)