Wireless S4A 架構
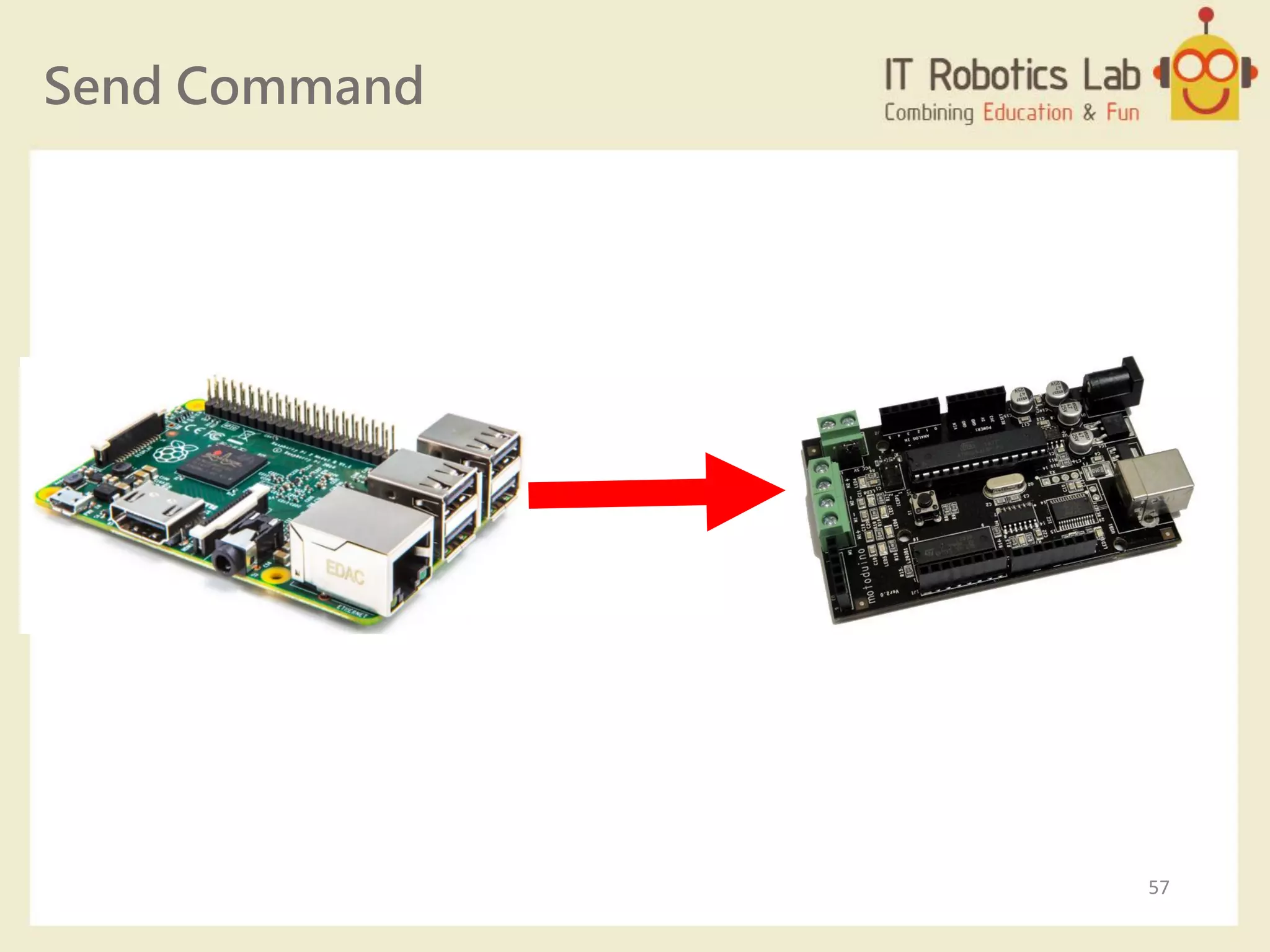
RaspberryPi
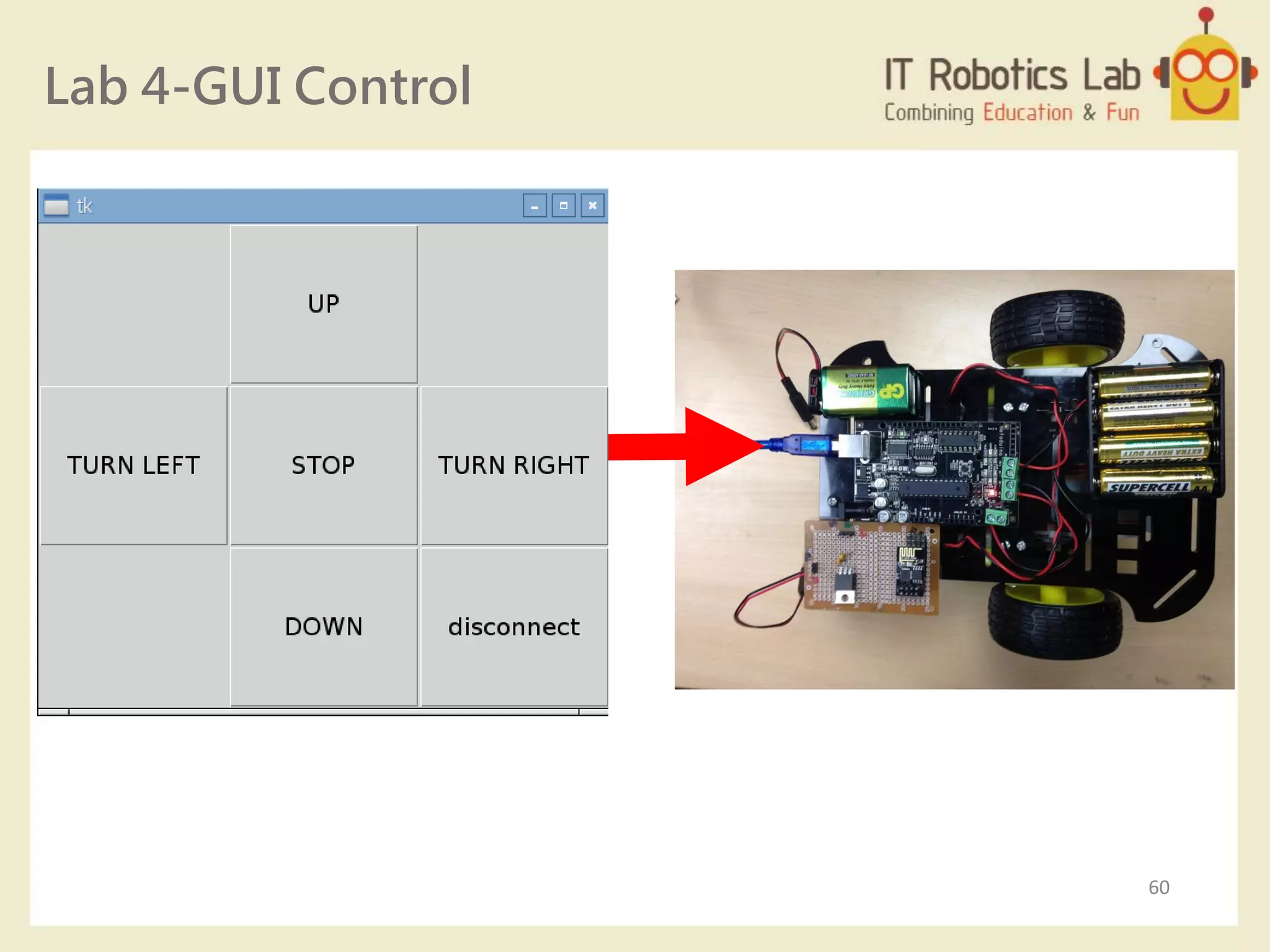
Motoduino
(Arduino)
• Linux OS
• S4A protocol implemented
by Python socket
• WiFi with AP mode
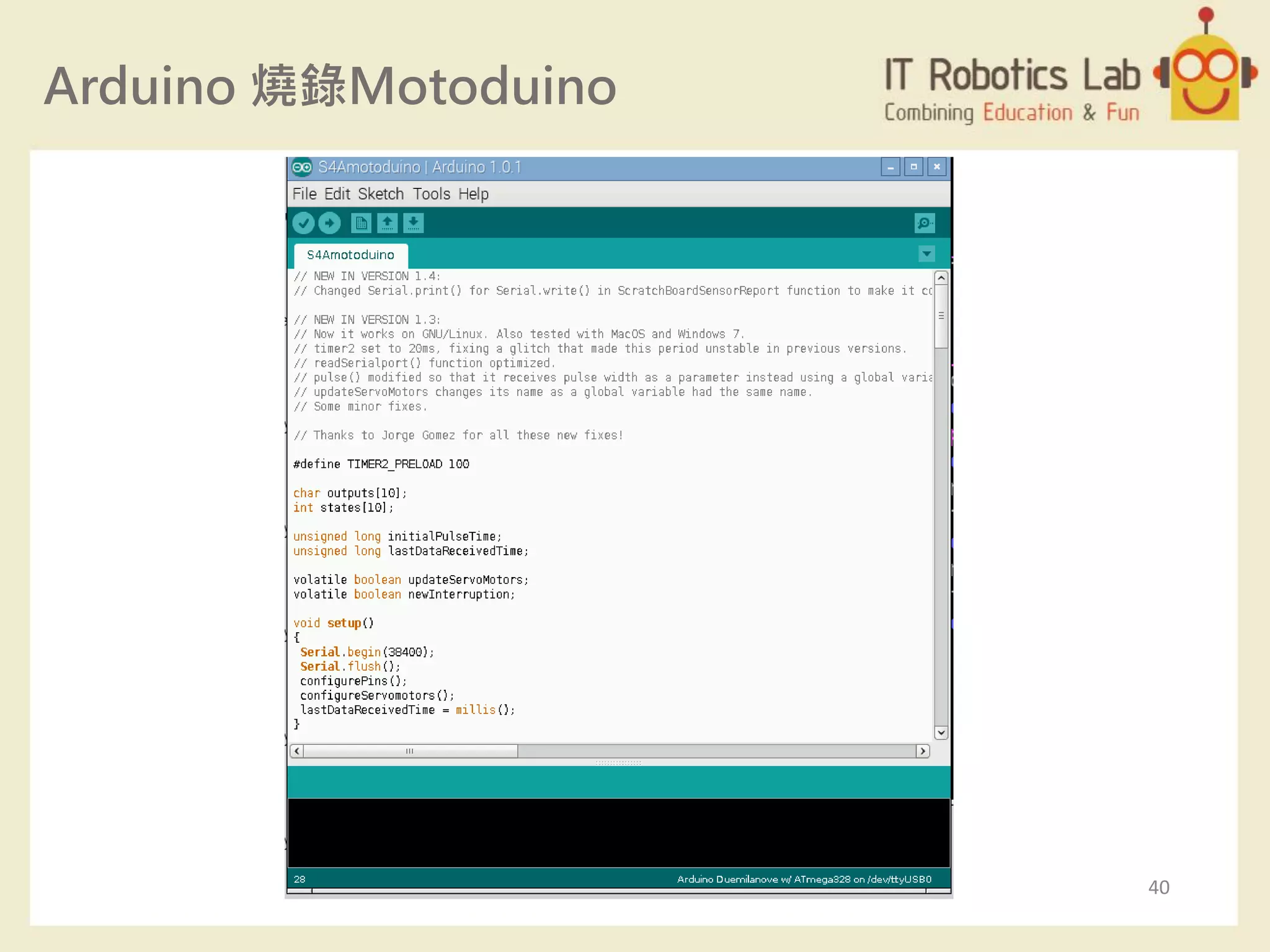
• S4A Firmware
• Motor driver (L293D)
• WiFi with STA mode (ESP8266)
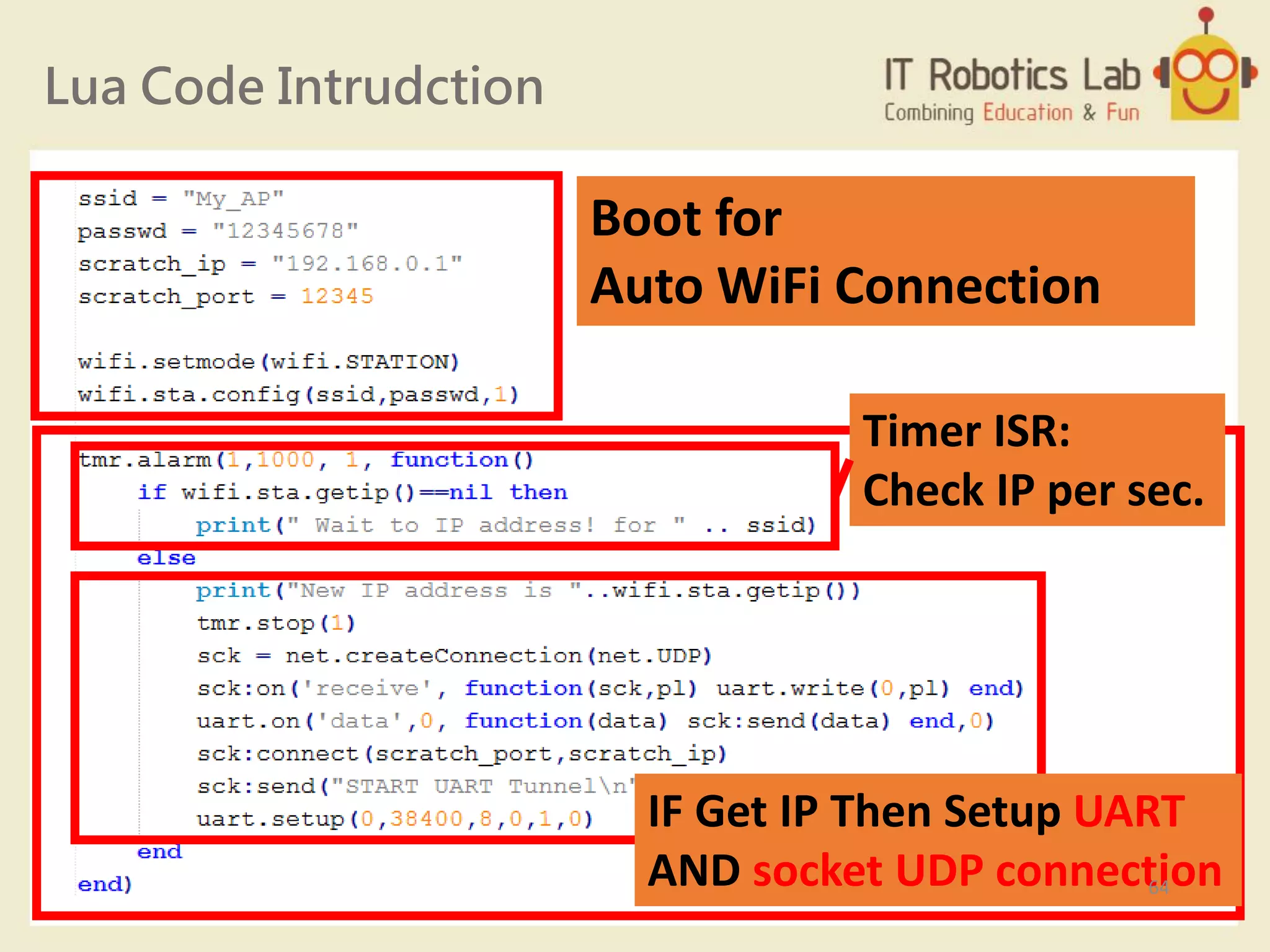
WiFi Connection
S4A protocol
34
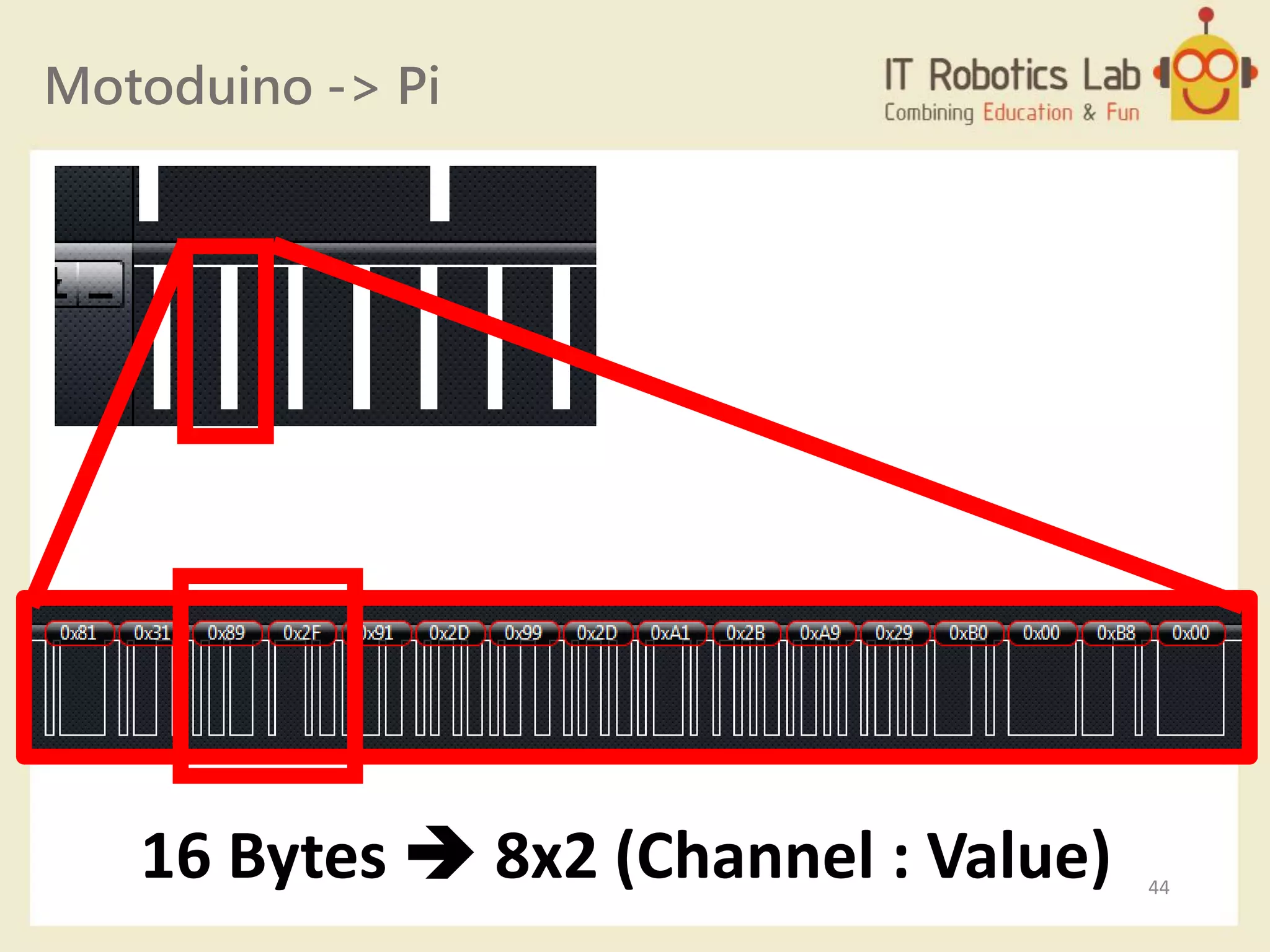
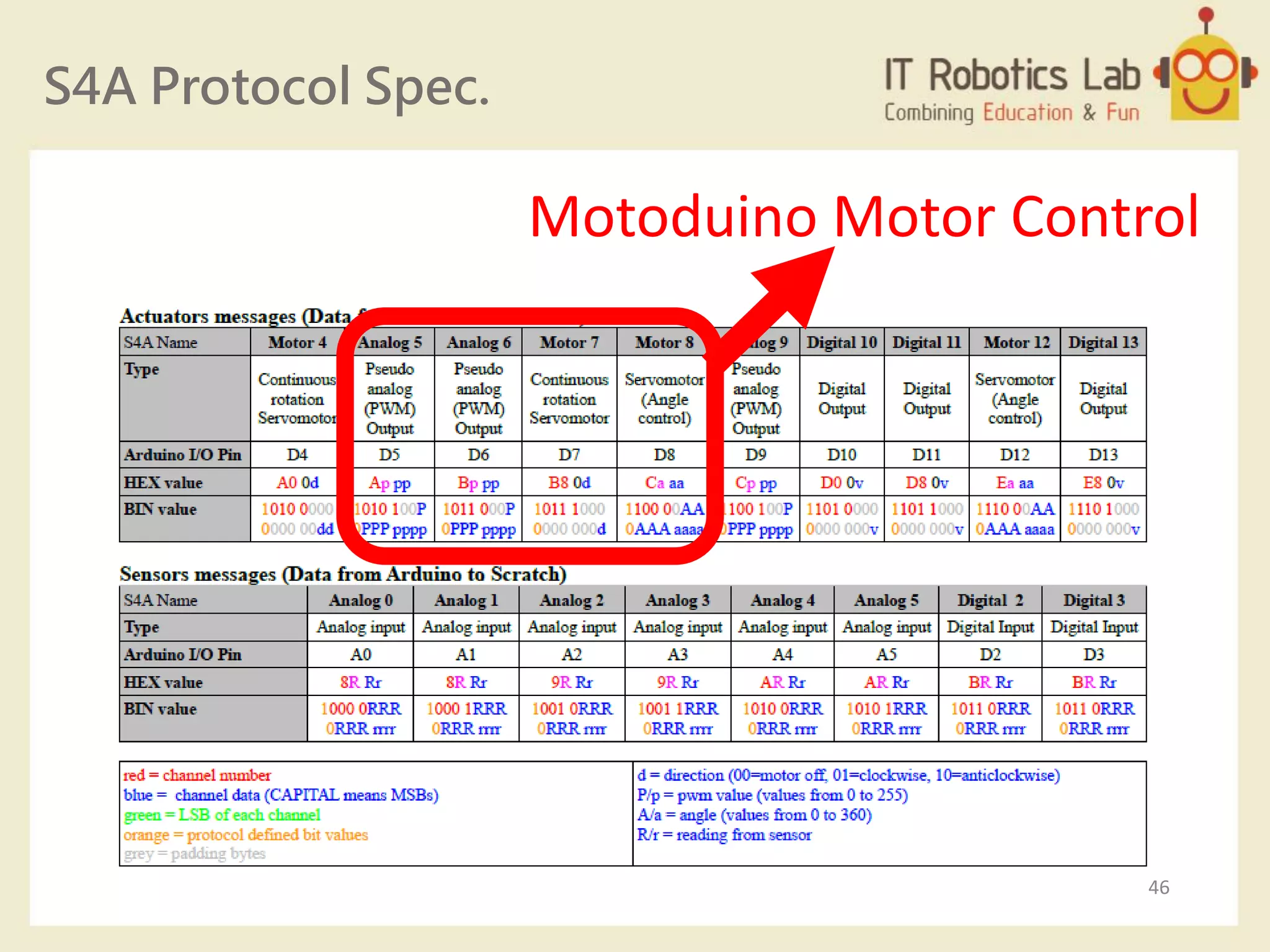
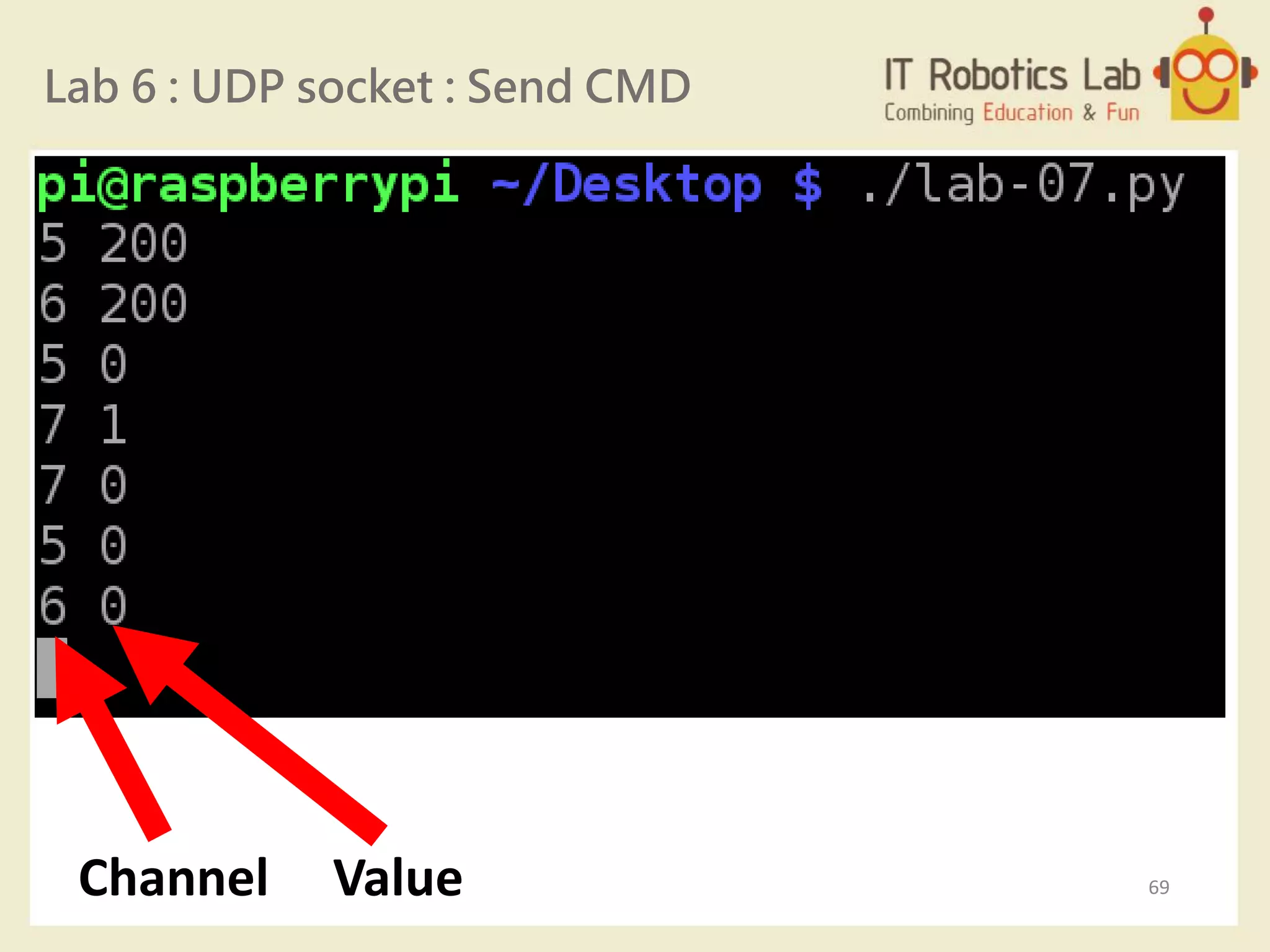
解析封包格式
1 0
High ByteLow Byte
Channel
[3:0]
Value
[6:0]
HL-identify (2 bit) +
Channel (4 bits) +
Value (10 bits)
Value
[9:7]
47
48.
Motoduino Channel Def: Pi
Channel Value
0 Analog Input (0~1023)
1 Analog Input (0~1023)
2 Analog Input (0~1023)
3 Analog Input (0~1023)
4 Analog Input (0~1023)
5 Analog Input (0~1023)
6 Digital : 0/1
7 Digital : 0/1
48
49.
Motoduino Channel Def: Pi
Channel Value
4 Continuous Rotation Motor
5 PWM: 0 ~ 255
6 PWM: 0 ~ 255
7 Digital : 0/1
8 Digital : 0/1
9 PWM: 0 ~ 255
10 Digital : 0/1
11 Digital : 0/1
12 Servo Motor
13 Digital : 0/1 49


































![解析封包格式
1 0
High Byte Low Byte
Channel
[3:0]
Value
[6:0]
HL-identify (2 bit) +
Channel (4 bits) +
Value (10 bits)
Value
[9:7]
47](https://image.slidesharecdn.com/backtoschools4a1-151130040641-lva1-app6891/75/S4A-47-2048.jpg)




























![LED Matrix: 64x16 + 64x16
85
R1, G1, B1
A,B,C,D
R2, G2, B2
A,B,C,D
16 bits x 4 = 64 bits
4bits[A:B:C:D]](https://image.slidesharecdn.com/backtoschools4a1-151130040641-lva1-app6891/75/S4A-85-2048.jpg)
![Scan LED Matrix
86
C Programming
Array : 64x32 [R,G,B] bytes
Scan LED Matrix:
Shift Register input 64 bits
Shift Demultiplexer 0 ~ 31](https://image.slidesharecdn.com/backtoschools4a1-151130040641-lva1-app6891/75/S4A-86-2048.jpg)



![Program Structure
90
LED Matrix
Scanning Loop
RGB Matrix
Handling Loop
動畫、文字…
RGB Pixel Matrix [64][32]](https://image.slidesharecdn.com/backtoschools4a1-151130040641-lva1-app6891/75/S4A-90-2048.jpg)