• Powerful, TinyComputer dedicated to robotics applications
• Based on the Vortex86DX, a 32bit x86 CPU running at 1000MHz with 256MB DRAM
• Compatible with Windows, Linux and DOS
• Open Source C++ Library for RoBoard‘s unique I/O functions (sensors, actuators, etc.)
RoBoard
9.
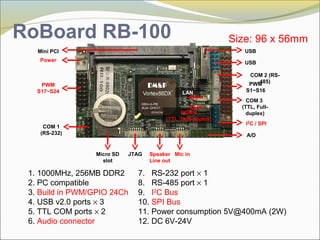
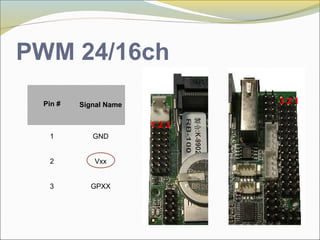
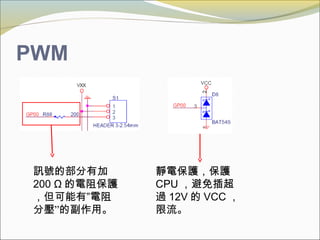
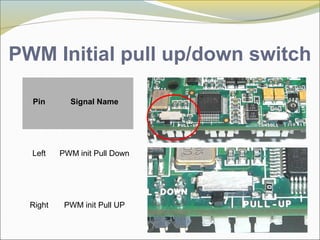
PWM
S1~S16LAN
COM 4
(TTL, Half-duplex)
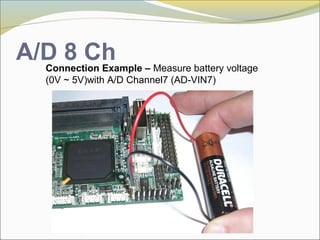
A/D
I2
C/ SPI
COM 3
(TTL, Full-
duplex)
COM 2 (RS-
485)
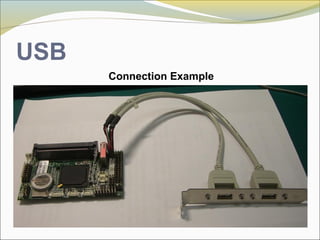
USB
USB
Micro SD
slot
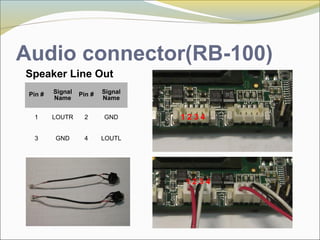
JTAG Speaker
Line out
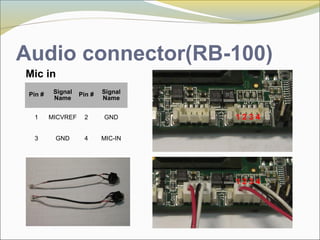
Mic in
Mini PCI
Power
PWM
S17~S24
COM 1
(RS-232)
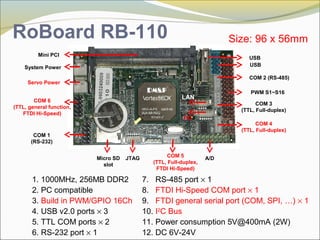
RoBoard RB-100
1. 1000MHz, 256MB DDR2
2. PC compatible
3. Build in PWM/GPIO 24Ch
4. USB v2.0 ports × 3
5. TTL COM ports × 2
6. Audio connector
7. RS-232 port × 1
8. RS-485 port × 1
9. I2
C Bus
10. SPI Bus
11. Power consumption 5V@400mA (2W)
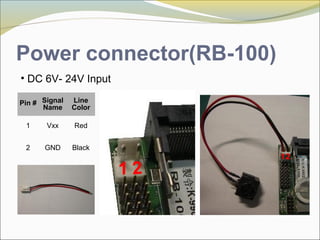
12. DC 6V-24V
Size: 96 x 56mm
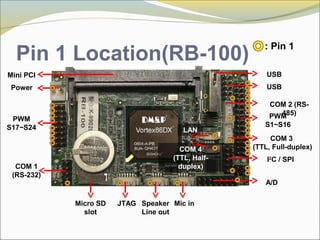
10.
1. 1000MHz, 256MBDDR2
2. PC compatible
3. Build in PWM/GPIO 16Ch
4. USB v2.0 ports × 3
5. TTL COM ports × 2
6. RS-232 port × 1
7. RS-485 port × 1
8. FTDI Hi-Speed COM port × 1
9. FTDI general serial port (COM, SPI, …) × 1
10. I2
C Bus
11. Power consumption 5V@400mA (2W)
12. DC 6V-24V
Size: 96 x 56mmRoBoard RB-110
COM 6
(TTL, general function,
FTDI Hi-Speed)
COM 1
(RS-232)
A/DCOM 5
(TTL, Full-duplex,
FTDI Hi-Speed)
COM 4
(TTL, Full-duplex)
COM 3
(TTL, Full-duplex)
COM 2 (RS-485)
USB
LAN
I2
C
Mini PCI
System Power
PWM S1~S16
Servo Power
Micro SD
slot
JTAG
USB
11.
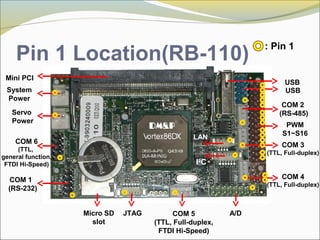
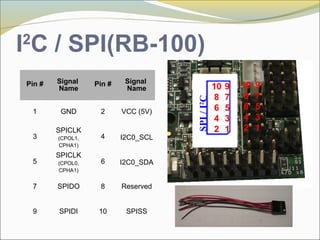
Pin 1 Location(RB-100)
PWM
S1~S16
LAN
COM4
(TTL, Half-
duplex)
A/D
I2
C / SPI
COM 2 (RS-
485)
USB
USB
Micro SD
slot
JTAG Speaker
Line out
Mic in
Mini PCI
Power
PWM
S17~S24
COM 1
(RS-232)
: Pin 1
COM 3
(TTL, Full-duplex)
12.
COM 6
(TTL,
general function,
FTDIHi-Speed)
COM 1
(RS-232)
A/DCOM 5
(TTL, Full-duplex,
FTDI Hi-Speed)
COM 4
(TTL, Full-duplex)
COM 3
(TTL, Full-duplex)
COM 2
(RS-485)
USB
LAN
I2
C
Mini PCI
System
Power
PWM
S1~S16
Servo
Power
Micro SD
slot
JTAG
USB
Pin 1 Location(RB-110)
: Pin 1
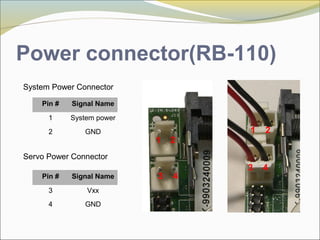
Power connector(RB-110)
System PowerConnector
Pin # Signal Name
1 System power
2 GND
Pin # Signal Name
3 Vxx
4 GND
1 2
3 4
1 2
3 4
Servo Power Connector
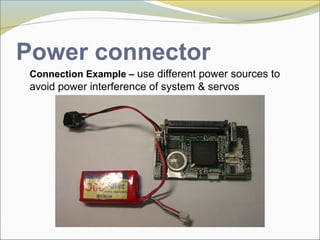
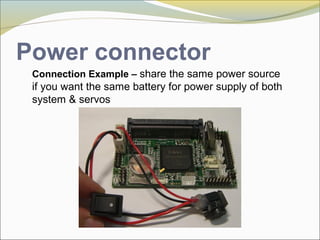
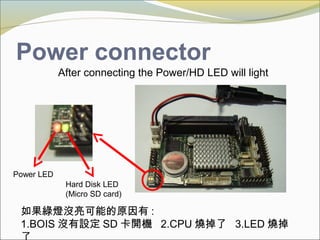
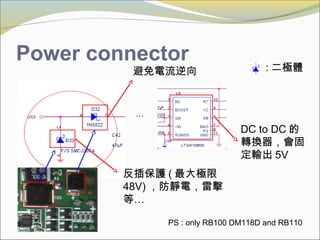
Power connector
After connectingthe Power/HD LED will light
Power LED
Hard Disk LED
(Micro SD card)
如果綠燈沒亮可能的原因有 :
1.BOIS 沒有設定 SD 卡開機 2.CPU 燒掉了 3.LED 燒掉
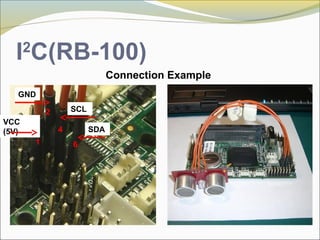
COM 2 /RS-485
Pin # Signal
Name
Line
Color
1 GND Black
2 Vxx Red
3 RS485+ Other
4 RS485- Other
1 2 3 4
1 2 3 4
32.
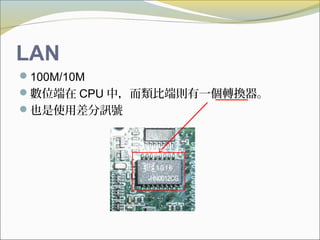
COM 2 /RS-485
TX/RX → RS485+/RS485-
為差分訊號,優點為抗雜訊,長距離傳送,速度較快
差分訊號 :
TXDEN: 控制方向的 (in or out)
1 +5V
-5V
0
+5V
-5V
1
+5V
-5V 0+5V
-5V
33.
COM 3 /Full Duplex TTL
Pin # Signal
Name
Line
Color
1 GND Black
2 Vxx Red
3 TXD3 Other
4 RXD3 Other
1 2 3 4
1 2 3 4
34.
COM 4 /Half Duplex TTL(RB-100)
Pin # Signal
Name
Line
Color
1 GND Other
2 Vxx Red
3 TXRX4 Black
3 2 1
3 2 1
35.
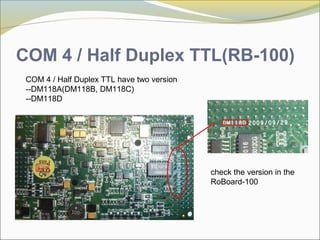
COM 4 /Half Duplex TTL(RB-100)
COM 4 / Half Duplex TTL have two version
--DM118A(DM118B, DM118C)
--DM118D
check the version in the
RoBoard-100
36.
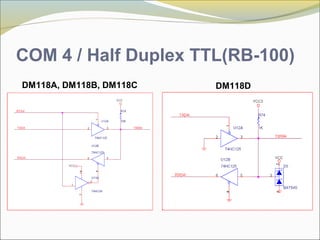
COM 4 /Half Duplex TTL(RB-100)
DM118A, DM118B, DM118C DM118D
37.
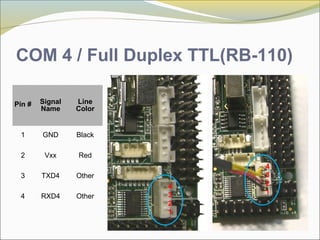
COM 4 /Full Duplex TTL(RB-110)
4
3
2
1
4
3
2
1
Pin # Signal
Name
Line
Color
1 GND Black
2 Vxx Red
3 TXD4 Other
4 RXD4 Other
38.
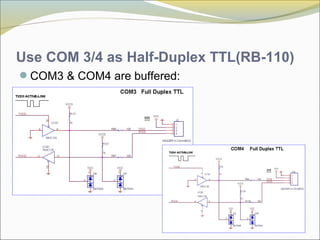
COM3 & COM4are buffered:
Use COM 3/4 as Half-Duplex TTL(RB-110)
39.
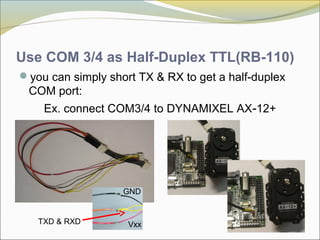
Use COM 3/4as Half-Duplex TTL(RB-110)
you can simply short TX & RX to get a half-duplex
COM port:
Ex. connect COM3/4 to DYNAMIXEL AX-12+
VxxTXD & RXD
GND
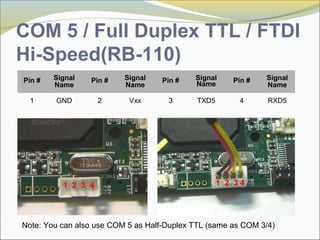
COM 5 /Full Duplex TTL / FTDI
Hi-Speed(RB-110)
Pin # Signal
Name
Pin # Signal
Name
Pin # Signal
Name
Pin # Signal
Name
1 GND 2 Vxx 3 TXD5 4 RXD5
1 2 3 4 1 2 3 4
Note: You can also use COM 5 as Half-Duplex TTL (same as COM 3/4)
42.
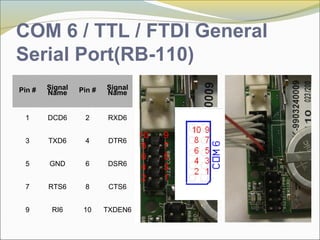
COM 6 /TTL / FTDI General
Serial Port(RB-110)
Pin # Signal
Name Pin # Signal
Name
1 DCD6 2 RXD6
3 TXD6 4 DTR6
5 GND 6 DSR6
7 RTS6 8 CTS6
9 RI6 10 TXDEN6
6
10
8
6
4
2
9
7
5
3
1
43.
COM 6 /TTL / FTDI General
Serial Port(RB-110)
COM6 is the second port of the built-in FTDI
FT2232H, and can function as COM, SPI, I2C, …
See FTDI FT2232H datasheet for more details
References for FTDI FT2232H:
FT2232H Datasheet :
http://www.ftdichip.com/Documents/DataSheets/DS_FT2232H.pdf
VCP Drivers : http://www.ftdichip.com/Drivers/VCP.htm
D2XX Drivers : http://www.ftdichip.com/Drivers/D2XX.htm
More information : http://www.ftdichip.com/Products/FT2232H.htm
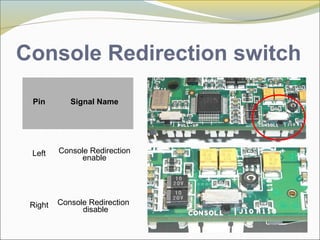
Console Redirection switch
RoBoard特有的功能
只能在 Real mode 下使用,一般在 DOS 下比較有用
,繪圖模式無法使用,保護模式下也無法使用
如果不小心把 USB 關掉,除了回復 BOIS 的設定外
,也可使用 console redirecion 來設定 USB 裝置
RB100 早期的版本 (A, B, C) 可能為無法使用外部換
,而在 D 版本後則都可以




























































![[RakutenTechConf2014] [A-1] OpenStack - the ubiquitous Open Source cloud plat...](https://cdn.slidesharecdn.com/ss_thumbnails/a12014-10-rakuten-techen-141105023801-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
























