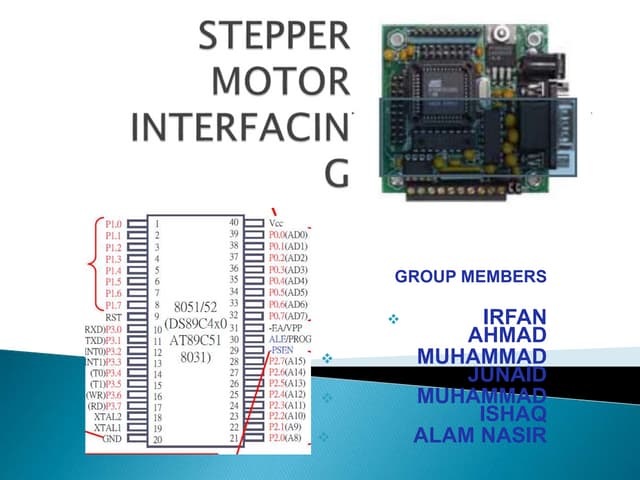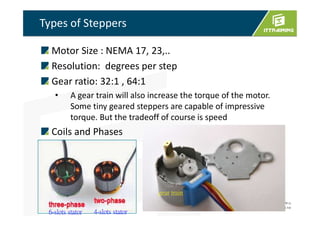
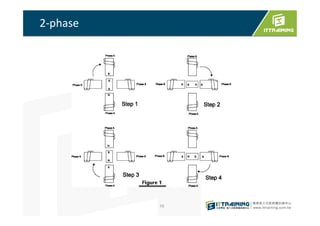
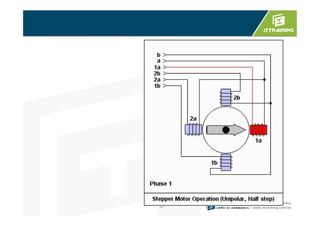


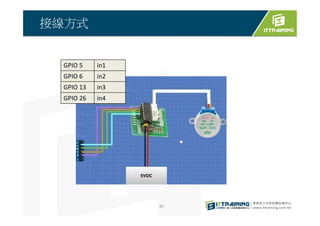
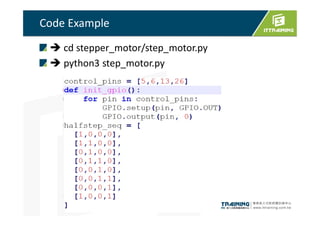
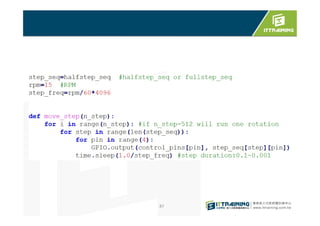
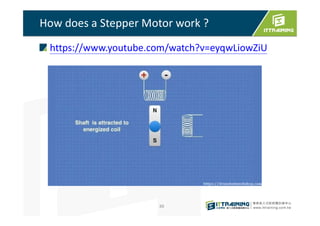
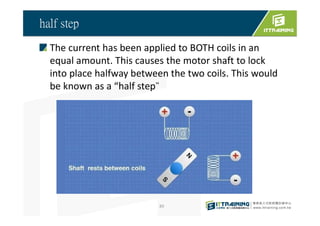
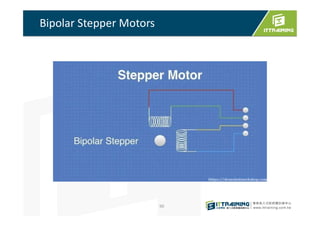


This document discusses stepper motors, including their types, resolutions, gear ratios, coils, phases, and drive methods. It provides details on a specific 28BYJ-48 5V unipolar stepper motor, including its specifications. It explains half-step sequencing and how stepper motor movement is controlled by pulse signals. Code examples are given for controlling a stepper motor with a Raspberry Pi. The document contrasts unipolar and bipolar stepper motors and their drive methods.