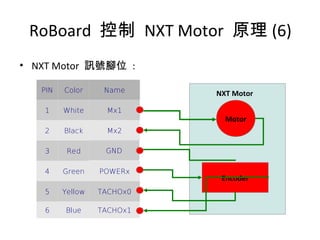
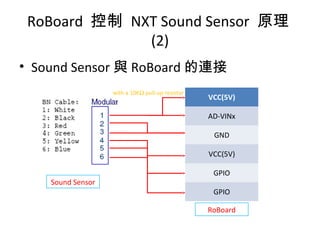
PIN Color Name
1White Mx1
2 Black Mx2
3 Red GND
4 Green POWERx
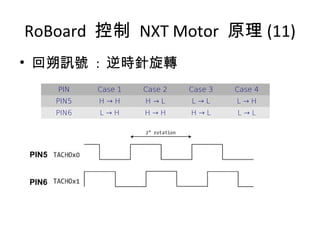
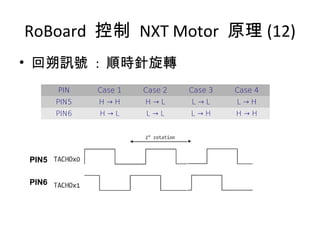
5 Yellow TACHOx0
6 Blue TACHOx1
Motor
Encoder
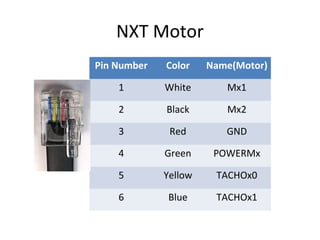
NXT Motor
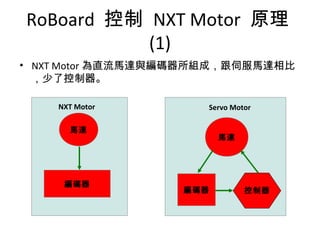
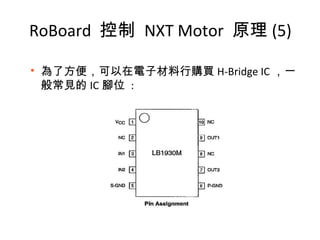
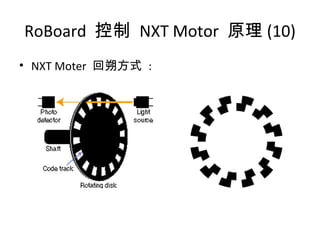
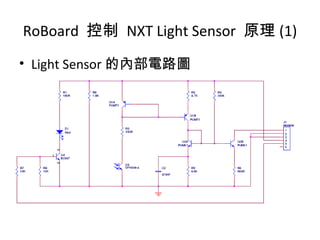
RoBoard 控制 NXT Motor 原理 (6)
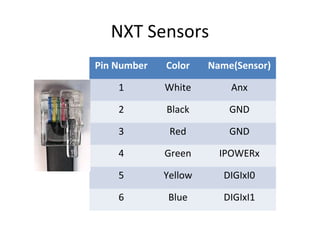
• NXT Motor 訊號腳位 :
45.
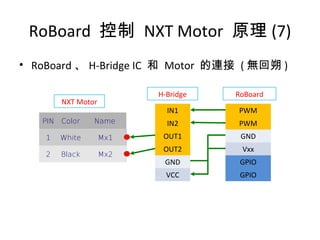
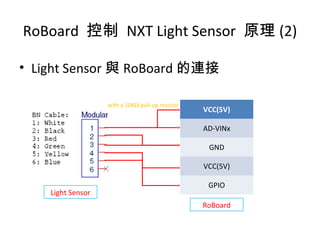
RoBoard 控制 NXTMotor 原理 (7)
• RoBoard 、 H-Bridge IC 和 Motor 的連接 ( 無回朔 )
IN1
IN2
OUT1
OUT2
GND
VCC
PIN Color Name
1 White Mx1
2 Black Mx2
PWM
PWM
GND
Vxx
GPIO
GPIO
H-Bridge RoBoard
NXT Motor
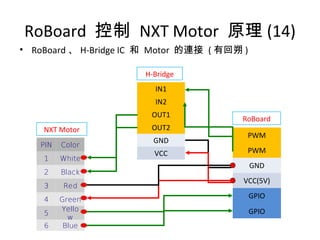
RoBoard 控制 NXTMotor 原理 (14)
• RoBoard 、 H-Bridge IC 和 Motor 的連接 ( 有回朔 )
IN1
IN2
OUT1
OUT2
GND
VCC
PIN Color
1 White
2 Black
3 Red
4 Green
5
Yello
w
6 Blue
NXT Motor
H-Bridge
PWM
PWM
GND
VCC(5V)
GPIO
GPIO
RoBoard
GPIO










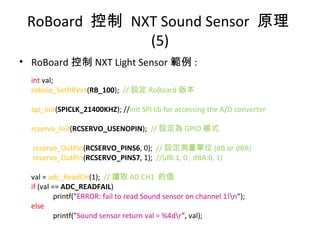

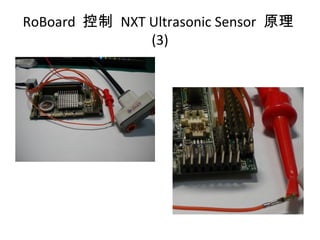

![RoBoard 控制 NXT Ultrasonic Sensor 原理
(5)
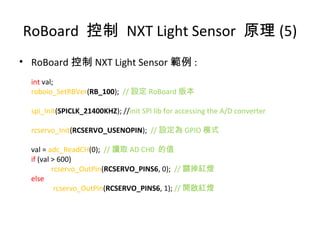
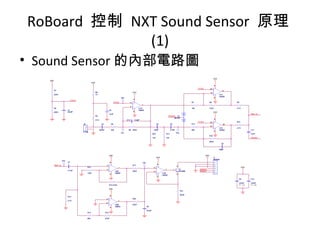
• RoBoard 控制 NXT Ultrasonic Sensor 範例 :
unsigned char data[1] = {0};
roboio_SetRBVer(RB_100); // 設定 RoBoard 版本
i2c_InitSW(I2CSW_LEGO, 100); // 設定 I2C 為 LEGO Mode, clock delay 100ms
i2c_SensorRead(0x02 >> 1, 0x42, data, 1); // 讀取 Ultrasonic Sensor 的值
printf("data = %8dr", data[0]); // 讀取 AD CH1 的值](https://image.slidesharecdn.com/nxt-130614132457-phpapp02/85/RoBoard-Lego-NXT-Sensors-37-320.jpg)