2
莊竣傑 Hellion Chuang
視覺辨識
LinuxCNC
3DPrinter
Open Source Projects:
https://github.com/roboard/Print3D
https://github.com/roboard/86Duino
https://code.google.com/p/rb050-little-turtle/
About me
R&D Engineer
DMP Electronics INC.
25
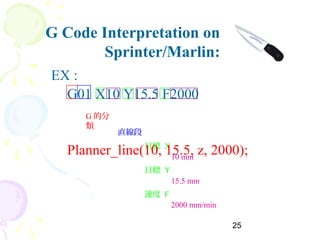
G Code Interpretationon
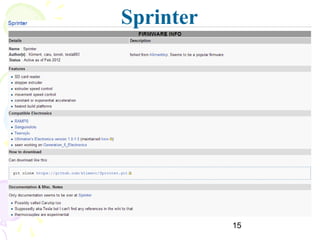
Sprinter/Marlin:
G01 X10 Y15.5 F2000
EX :
G 的分
類
直線段
目標 X
10 mm
目標 Y
15.5 mm
速度 F
2000 mm/min
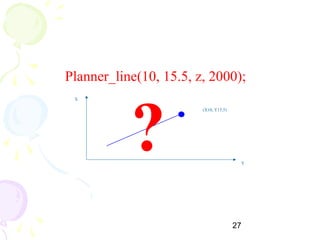
Planner_line(10, 15.5, z, 2000);
26.
26
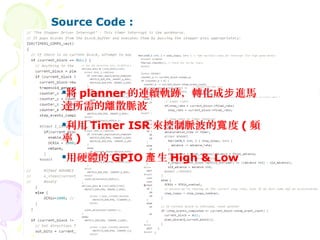
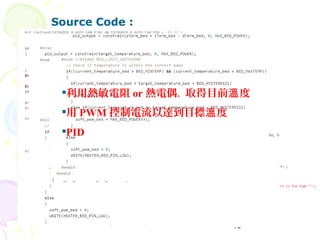
Source Code :
•字串解析
• G Code, M Code, other…
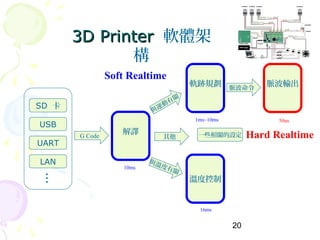
– 軌跡規劃
– 溫度設定
– 系統參數的設定
– 等…
58
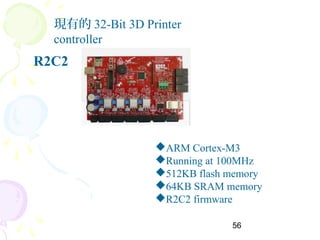
現有的 32-Bit 3DPrinter
controller
Smoothieboard
ARM Cortex-M3
Running at 96 to 120 MHz
512KB flash memory
64KB SRAM memory
Smoothieware firmware
Still MCU-baesd
solutions…
59.
59
現有的 32-Bit 3DPrinter
controller
86Duino Print3D
Vortex86EX 32-Bit x86
Running at 400MHz
128MB DDR3
RS232/
RS485/CAN
LAN
USB
USB
Host
X MOTOR
Z MOTOR Y MOTOR
E MOTOR
E HEATER
E THERM
X LIMIT Y LIMIT
Z LIMIT