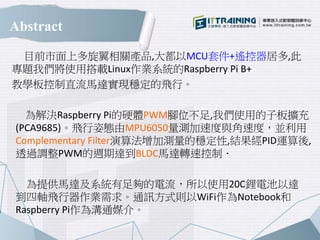
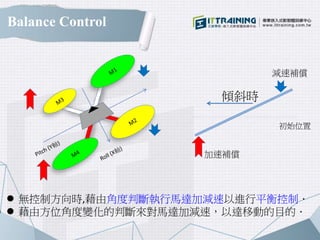
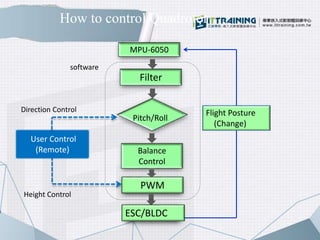
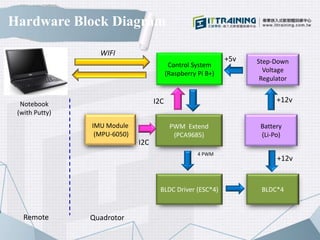
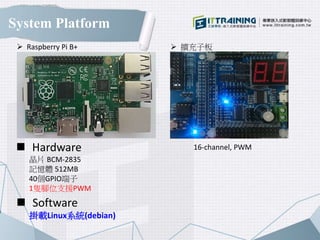
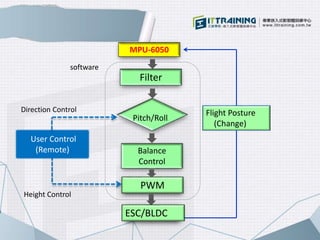
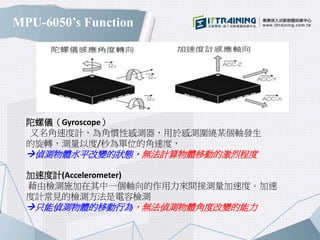
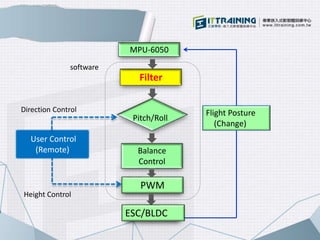
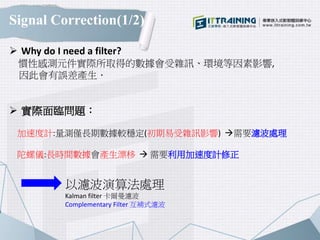
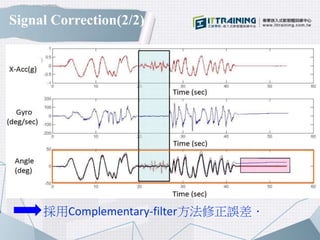
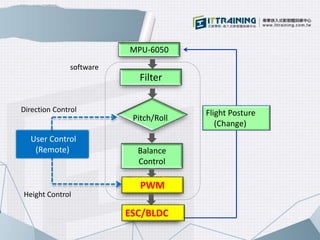
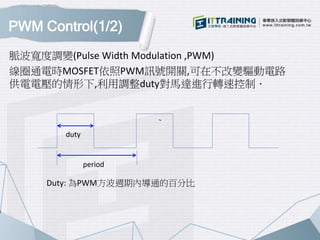
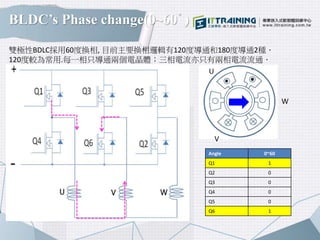
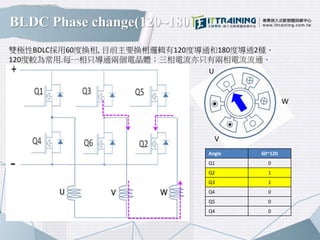
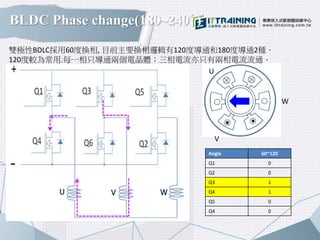
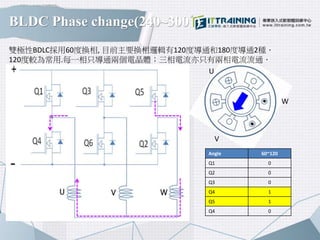
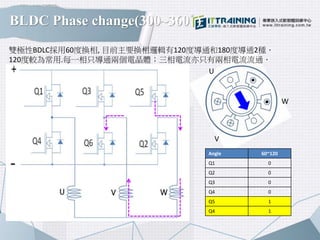
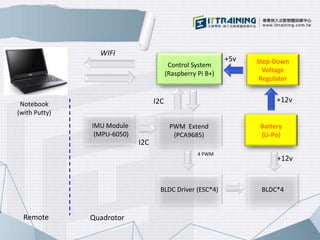
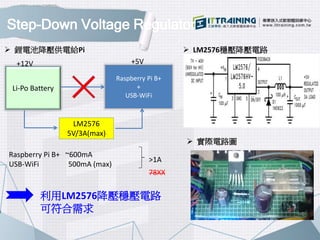
该文档介绍了利用树莓派B+和MPU6050传感器,控制四旋翼飞行器的稳定飞行。系统通过PWM调节无刷直流电机(BLDC)的转速,实现飞行姿态的控制,结合WiFi通信和补偿滤波算法,确保飞行的精确性与稳定性。成功实现了飞行控制系统的硬件和软件框架,涵盖了电源管理、传感器选型及控制算法等多个方面。





















![[ZigBee 嵌入式系統] ZigBee Architecture 與 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeearchitecture-150613072045-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)

![[嵌入式系統] 嵌入式系統進階](https://cdn.slidesharecdn.com/ss_thumbnails/advembedded-150613071653-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)


![[ZigBee 嵌入式系統] ZigBee 應用實作 - 使用 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeeappimplementation-150613072040-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)































































