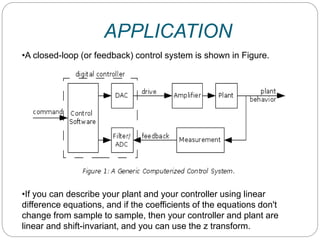
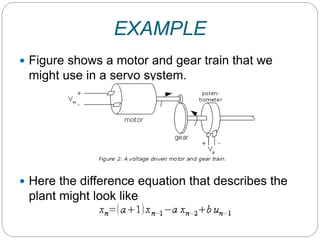
The document discusses the z-transform as a tool for analyzing closed-loop control systems, emphasizing its applications in linear and shift-invariant systems. It explains how the z-transform converts difference equations into algebraic equations, facilitating easier problem-solving and system behavior prediction. Additionally, it highlights the efficiency of using software to convert transfer functions into z-domain equations and subsequently into difference equations, streamlining the control system design process.