This document discusses various properties and concepts related to the z-transform, which is used to analyze discrete-time signals. It defines the z-transform and region of convergence. It then provides examples of calculating the z-transform for different signals. Key properties discussed include time shifting, scaling, time reversal, differentiation, and convolution. Theorems regarding the initial value and final value are also covered. Worked examples are provided to demonstrate applying the various properties and concepts.
![2
The Direct Z-Transform
The z-transform of a discrete time signal is defined as the power
series
(1)
Where z is a complex variable. For convenience, the z-transform of a
signal x[n] is denoted by
X(z) = Z{x[n]}
Since the z-transform is an infinite series, it exists only for those
values of z for which this series converges. The Region of
Convergence (ROC) of X(z) is the set of all values of z for which
this series converges.
We illustrate the concepts by some simple examples.
n
n
z
]
n
[
x
)
z
(
X](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-2-2048.jpg)
![3
Example 1: Determine the z-transform of
the following signals
(a) x[n] = [1, 2, 5, 7, 0, 1]
Solution: X(z) = 1 + 2z-1+ 5z-2 + 7z-3 + z-5,
ROC: entire z plane except z = 0
(b) y[n] = [1, 2, 5, 7, 0, 1]
Solution: Y(z) = z2 + 2z + 5 + 7z-1 + z-3
ROC: entire z-plane except z = 0 and z = .
(c) z[n] = [0, 0, 1, 2, 5, 7, 0, 1]
Solution: z-2 + 2z-3 + 5z-4 + 7z-5 + z-7, ROC: all z except z=0](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-3-2048.jpg)
![4
(d) p[n] = [n]
Solution: P(z) = 1, ROC: entire z-plane.
(e) q[n] = [n – k], k > 0
Solution: Q(z) = z-k, entire z-plane except
z=0.
(f) r[n] = [n+k], k > 0
Solution: R(z) = zk,
ROC: entire z-plane except z = .](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-4-2048.jpg)
![5
Example 2: Determine the z-transform of
x[n] = (1/2)nu[n]
Solution:
ROC: |1/2 z-1| < 1, or equivalently |z| > 1/2
1
2
1
n
0
n
1
n
n
0
n
n
n
z
2
1
1
1
.......
z
2
1
z
2
1
1
z
2
1
z
2
1
z
]
n
[
x
)
z
(
X
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-5-2048.jpg)
![6
Example 3: Determine the z-transform of the
signal x[n] = anu[n]
Solution:
|
a
|
|
z
:|
ROC
az
1
1
.......
az
az
1
az
z
a
)
z
(
X
1
2
1
1
n
0
n
1
n
0
n
n
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-6-2048.jpg)
![7
Properties of z-transform
Linearity
If x1[n] X1(z)
and x2[[n] X2(z)
then
a1x1[n] + a2x2[n] a1X1(z) + a2X2(z)](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-7-2048.jpg)
![8
Example: Determine the z-transform of
the signal x[n] = [3(2n) – 4(3n)]u[n]
Solution:
1
1
n
n
1
n
z
3
1
1
4
z
2
1
1
3
]
3
4
)
2
(
3
[
z
az
1
1
]]
n
[
u
a
[
z
Example 4: Determine the z-transform of
the signal (cosw0n)u[n]
2
0
1
0
1
1
jw
1
jw
0
n
jw
n
jw
0
z
w
cos
z
2
1
w
cos
z
1
z
e
1
1
2
1
z
e
1
1
2
1
]
n
[
u
n
w
cos
z
e
2
1
e
2
1
]
n
[
u
n
w
cos
0
0
0
0
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-8-2048.jpg)
![9
Time Shifting Property:
If x[n] X(z) then x[n-k] z-kX(z)
Proof:
since
then the change of variable m = n-k
produces
n
n
z
]
k
n
[
x
]]
k
n
[
x
[
z
)
z
(
X
z
z
]
m
[
x
z
z
]
m
[
x
]]
k
n
[
x
[
z
k
m
m
k
m
)
k
m
(
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-9-2048.jpg)
![10
Example: Find the z-transform of a unit step
function. Use time shifting property to find z-
transform of u[n] – u[n-N].
The z-transform of u[n] can be found as
Now the z-transform of u[n]-u[n-N] may be
found as follows:
1
2
1
0
n
n
n
n
z
1
1
.......
z
z
1
z
z
]
n
[
u
]]
n
[
u
[
z
1
N
1
N
1
z
1
z
1
z
1
1
z
z
1
1
]]
N
n
[
u
]
n
[
u
[
z
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-10-2048.jpg)
![11
Scaling in the z-domain
If x[n] X(z)
Then anx[n] X(a-1z)
For any constant a, real or complex.
Proof:
Example 5: Determine the z-transform of the signal
an(cosw0n)u[n].
Solution: since
z
a
X
z
a
]
n
[
x
z
]
n
[
x
a
]
n
[
x
a
z 1
n
n
1
n
n
n
n
2
0
1
0
1
0
z
w
cos
z
2
1
w
cos
z
1
]
n
[
u
)
n
w
[cos(
z
2
2
0
1
0
1
0
n
z
a
w
cos
az
2
1
w
cos
az
1
]]
n
[
u
n
w
cos
a
[
z
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-11-2048.jpg)
![12
Time reversal
If x[n] X(z) then x[-n] X(z-1)
Proof:
Example 6: Determine the z-transform of
u[-n].
Solution: since z[u[n]] = 1/(1 – z-1)
Therefore,
Z[u[-n]] = 1/(1-z)
m m
1
m
1
m
n
n
)
z
(
X
z
]
m
[
x
z
]
m
[
x
z
]
n
[
x
]]
n
[
x
[
z](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-12-2048.jpg)
![13
Differentiation in the z - Domain
x[n] X(z) then nx[n] = -z(dX(z)/dz)
Tutorial 4: Q1: Prove the differentiation
property of z – transform.
Example 7: Determine the z-transform of the
signal x[n] = nanu[n].
Solution:
2
1
1
1
n
1
n
az
1
az
az
1
1
dz
d
z
]]
n
[
u
na
[
z
az
1
1
]]
n
[
u
a
[
z
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-13-2048.jpg)
![14
Convolution of two sequences
If x1[n] X1(z) and x2[n] X2(z) then
x1[n]*x2[n] X1(z)X2(z)
Proof:
The convolution of x1[n] and x2[n] is defined as
k
2
1
2
1 ]
k
n
[
x
]
n
[
x
]
n
[
x
*
]
n
[
x
]
n
[
x
The z-transform of x[n] is
n
n
n
2
1
n
n
z
k
n
x
]
k
[
x
z
]
n
[
x
)
z
(
X
Upon interchanging the order of the summation
and applying the time shifting property, we obtain
z
X
z
X
z
]
k
[
x
z
X
z
k
n
x
k
x
)
z
(
X 1
k
2
k
1
2
n
n
2
k
1
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-14-2048.jpg)
![15
Example 8: Compute the convolution
of the signals x1[n] = [1, -2, 1] and
Solution:
X1(z) = 1 – 2z-1 + z-2
X2(z) = 1 + z-1 + z-2 + z-3 + z-4 + z-5
Now X(z) = X1(z)X2(z) = 1 – z-1 – z-6 + z-7
Hence x[n] = [1, -1, 0, 0, 0, 0, -1, 1]
Note: You should verify this result from the
definition of the convolution sum.
elsewhere
,
0
5
n
0
,
1
]
n
[
x2](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-15-2048.jpg)
![16
Correlation of two sequences
If x1[n] X1(z) and x2[n] X2(z)
then rx1x2[k] = X1(z)X2(z-1)
Tutorial 4 Q2: Prove this property.
The Initial Value Theorem:
If x[n] is causal then )
z
(
X
lim
]
0
[
x
z
Proof:
....
z
]
2
[
x
z
]
1
[
x
]
0
[
x
z
]
n
[
x
)
z
(
X 2
1
0
n
n
Obviously, as z , z-n 0 since n >0, this
proves the theorem.](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-16-2048.jpg)
![17
Final Value Theorem
If x[n] X(z), then )
z
(
X
z
1
lim
]
[
x 1
1
z
Tutorial 4 Q3: Prove the Final Value
Theorem
Example 9: Find the final value of
2
1
1
z
8
.
0
z
8
.
1
1
z
2
)
z
(
X
Solution: 2
1
1
1
1
z
8
.
0
z
8
.
1
1
z
2
z
1
)
z
(
X
z
1
1
1
1
1
1
1
z
5
.
0
1
z
2
z
5
.
0
1
z
1
z
2
z
1
The final value theorem yields
10
2
.
0
2
z
8
.
0
1
z
2
lim
]
[
y 1
1
1
z
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-17-2048.jpg)
![19
Power Series Method
Example 2: Determine the z-transform of
2
1
z
5
.
0
z
5
.
1
1
1
)
z
(
X
By dividing the numerator of X(z) by its
denominator, we obtain the power series
...
z
z
z
z
1
z
z
1
1 4
16
31
3
8
15
2
4
7
1
2
3
2
2
1
1
2
3
x[n] = [1, 3/2, 7/2, 15/8, 31/16,…. ]](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-19-2048.jpg)
![20
Power Series Method
Example 2:Determine the z-transform of
2
1
1
z
z
2
2
z
4
)
z
(
X
By dividing the numerator of X(z) by its
denominator, we obtain the power series
x[n] = [2, 1.5, 0.5, 0.25, …..]](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-20-2048.jpg)
![21
Partial Fraction Method:
Example 1: Find the signal corresponding to
the z-transform
2
1
3
z
z
3
2
z
)
z
(
X
Solution:
5
.
0
z
1
z
z
5
.
0
z
5
.
0
z
5
.
1
z
5
.
0
z
z
3
2
z
)
z
(
X 2
3
2
1
3
5
.
0
z
4
1
z
1
z
1
z
3
5
.
0
z
1
z
z
5
.
0
z
)
z
(
X
2
2
5
.
0
z
z
)
4
(
1
z
z
z
1
3
)
z
(
X
or 1
1
1
z
5
.
0
1
1
4
z
1
1
z
3
)
z
(
X
]
n
[
u
5
.
0
4
]
n
[
u
]
1
n
[
]
n
[
3
]
n
[
x
n
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-21-2048.jpg)
![22
Partial Fraction Method:
Example 2: Find the signal corresponding to the z-
transform
2
1
1
z
2
.
0
1
z
2
.
0
1
1
)
z
(
Y
Solution:
2
3
2
.
0
z
2
.
0
z
z
)
z
(
Y
2
2
2
2
.
0
z
1
.
0
2
.
0
z
75
.
0
2
.
0
z
25
.
0
2
.
0
z
2
.
0
z
z
z
)
z
(
Y
2
2
.
0
z
z
1
.
0
2
.
0
z
z
75
.
0
1
z
z
25
.
0
)
z
(
Y
2
1
1
2
.
0
1
.
0
1
1
z
2
.
0
1
z
2
.
0
z
2
.
0
1
1
75
.
0
z
2
.
0
1
1
25
.
0
]
n
[
u
2
.
0
n
5
.
0
]
n
[
u
2
.
0
75
.
0
]
n
[
u
2
.
0
25
.
0
]
n
[
y
n
n
n
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-22-2048.jpg)
![23
The One-Sided z-Transform
The one-sided or unilateral z-transform of a signal
x[n] is defined by
0
n
n
z
]
n
[
x
)
z
(
X
Characteristics:
•It does not contain information about the
signal x[n] for negative values of time.
• It is unique only for causal signals.](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-23-2048.jpg)
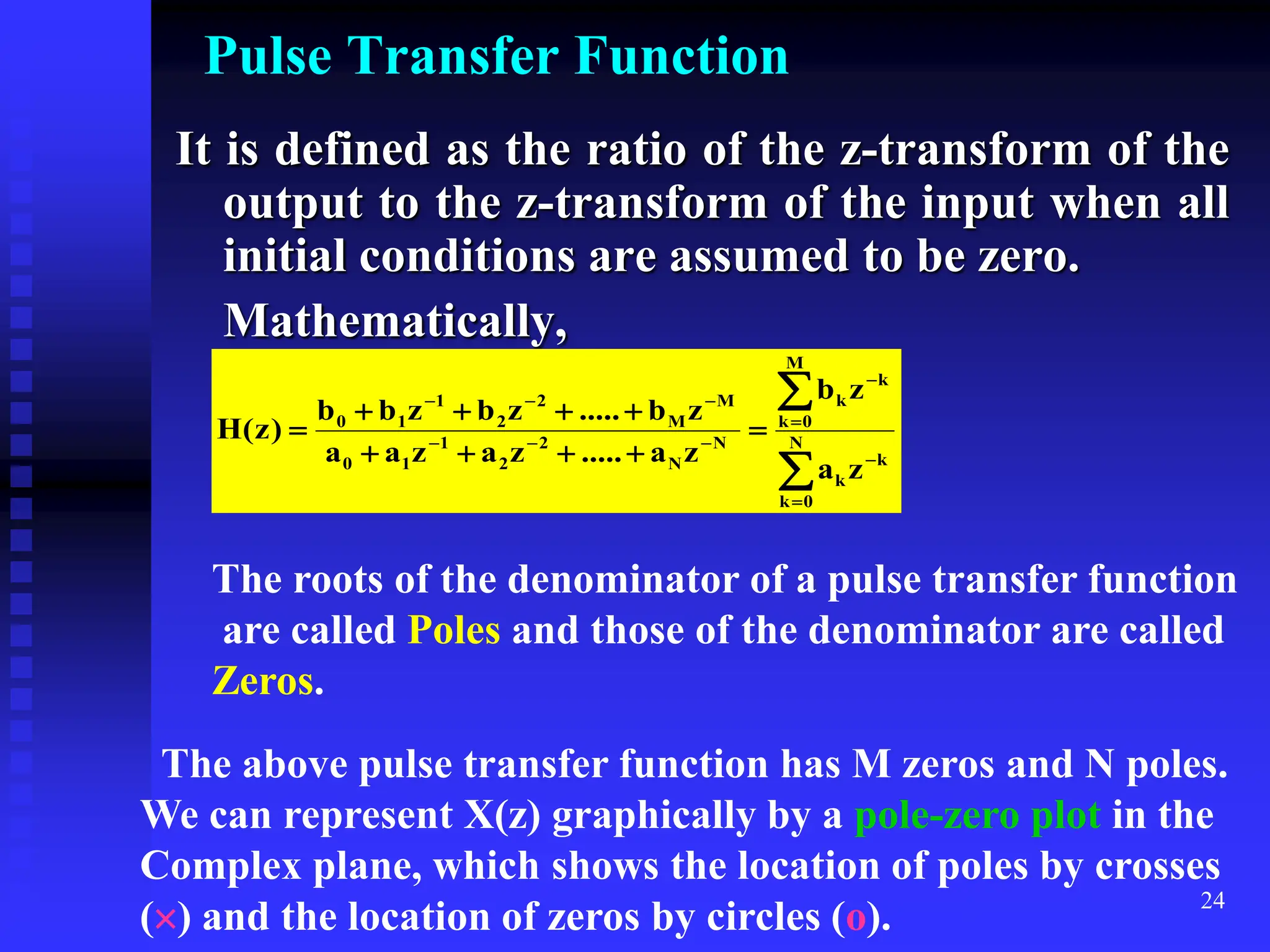
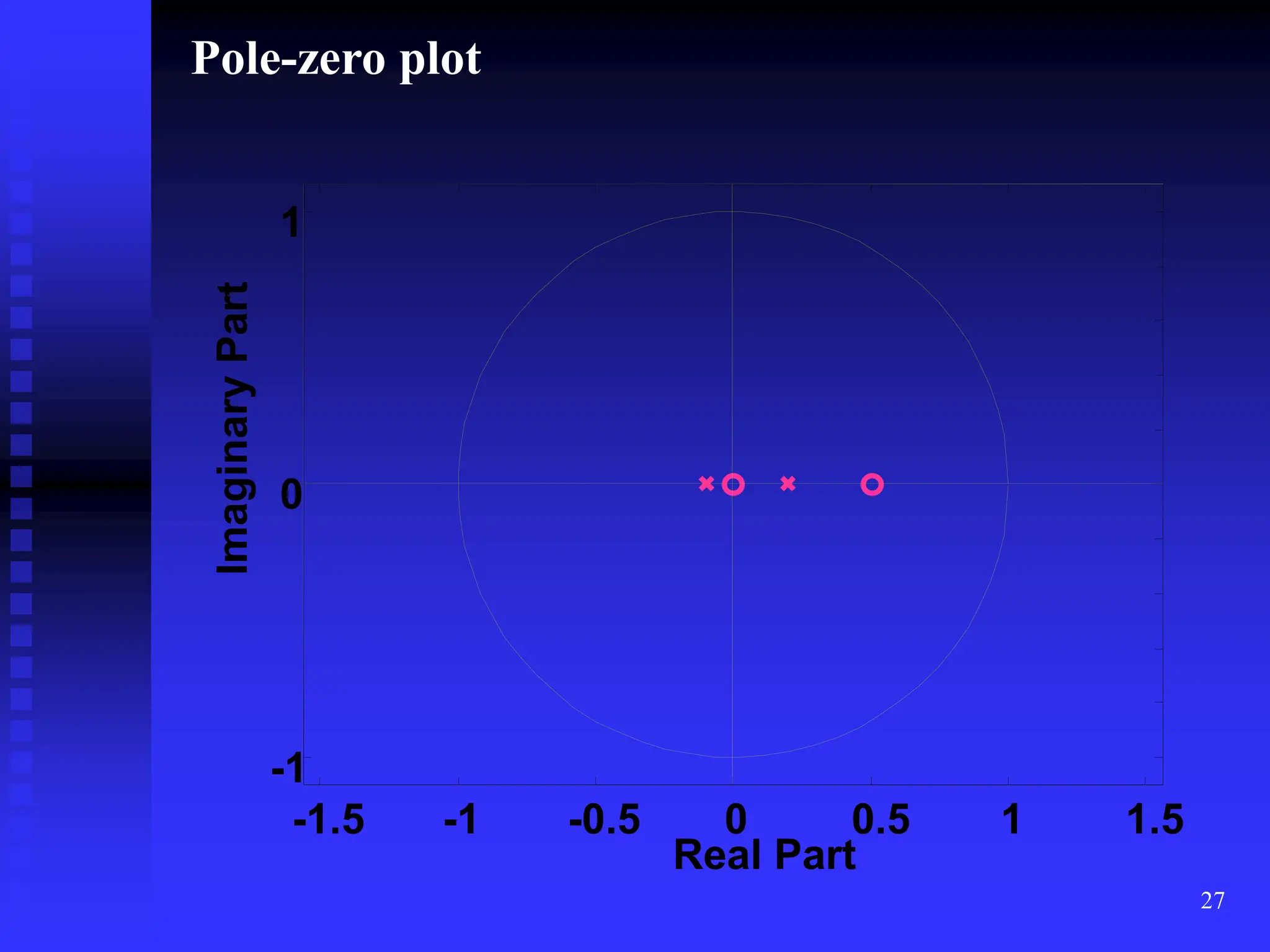
![26
Example: A system is characterized by
by the difference equation
y[n] – 0.1y[n-1] – 0.02 y[n-2] = 2x[n] – x[n-1].
Find the system transfer function and unit
impulse response.
Solution: Taking the z-transform of both sides of the
difference equation (ignoring the initial
conditions) we have
Y(z) – 0.1 z-1Y(z) – 0.02z-2Y(z) = 2X(z) – z-1X(z)
Y(z) [ 1 –0.1z-1 – 0.02z-2 ]= X(z [2 – z-1]
2
1
1
z
02
.
0
z
1
.
0
1
z
2
)
z
(
X
)
z
(
Y
This transfer function has two poles (i.e. z = -0.1, 0.2) and
Two zeros at z =0, 0.5. This shows that the system is
BIBO stable. The Pole-zero plot is given on the next slide.](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-26-2048.jpg)
![28
To find the unit impulse response, we
compute the inverse z-transform of H(z) by
using partial fraction expansion:
1
.
0
z
2
.
0
z
2
z
2
02
.
0
z
1
.
0
z
z
z
2
z
02
.
0
z
1
.
0
1
z
2
)
z
(
H
2
2
2
2
1
1
1
.
0
z
4
2
.
0
z
2
1
.
0
z
2
.
0
z
1
z
2
z
)
z
(
H
1
1
z
1
.
0
1
1
4
z
2
.
0
1
1
2
1
.
0
z
z
4
2
.
0
z
z
2
)
z
(
H
and, the unit impulse response is
H[n] = -2(0.2)nu[n] + 4(-0.1)nu[n]](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-28-2048.jpg)
![29
Response of systems with non-zero initial
conditions
We can use z-transform to solve the difference
equation that characterizes a causal, linear, time
invariant system. The following expressions are
especially useful to solve the difference
equations:
z[y[(n-1)T] = z-1Y(z) +y[-T]
Z[y(n-2)T] = z-2Y(z) + z-1y[-T] + y[-2T]
Z[y(n-3)T] = z-3Y(z) + z-2y[-T] + z-1y[-2T] +
y[-3T]](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-29-2048.jpg)
![30
Tutorial 5 Q1: Determine the step response of
the system
y[n]=ay[n-1] + x[n], -1 < a < 1
when the initial condition is y[-1] = 1.](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-30-2048.jpg)
![31
Example: Consider the following difference
equation:
y[nT] –0.1y[(n-1)T] – 0.02y[(n-2)T] = 2x[nT] –
x[(n-1)T]
where the initial conditions are y[-T] = -10 and y[-
2T] = 20. Find the output y[nT] when x[nT] is the
unit step input.
Solution:
Computing the z-transform of the difference
equation gives
Y(z) – 0.1[z-1Y(z) + y[-T]] – 0.02[z-2Y(z) + z-1y[-T]
+ y[-2T]] = 2X(z) – z-1X(z)
Substituting the initial conditions we get
Y(z) – 0.1z-1Y(z) +1 – 0.02z-2Y(z) + 0.2z-1 –0.4 =
(2 – z-1)X(z)](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-31-2048.jpg)
![32
6
.
0
z
2
.
0
z
1
1
z
2
)
z
(
Y
z
02
.
0
z
1
.
0
1 1
1
1
2
1
6
.
0
z
2
.
0
z
1
z
2
z
02
.
0
z
2
.
0
1
)
z
(
Y 1
1
1
2
1
1
1
1
2
1
2
1
1
2
1
z
1
.
0
1
z
2
.
0
1
z
1
z
2
.
0
z
6
.
0
4
.
1
z
02
.
0
z
1
.
0
1
z
1
z
2
.
0
z
6
.
0
4
.
1
)
z
(
Y
1
.
0
z
2
.
0
z
1
z
z
2
.
0
z
6
.
0
z
4
.
1 2
3
1
.
0
z
830
.
0
2
.
0
z
567
.
0
1
z
136
.
1
z
)
z
(
Y
1
1
1
z
1
.
0
1
1
830
.
0
z
2
.
0
1
1
567
.
0
z
1
1
136
.
1
)
z
(
Y
and the output signal y[nT] is
]
nT
[
u
)
1
.
0
(
830
.
0
]
nT
[
u
)
2
.
0
(
567
.
0
]
nT
[
u
136
.
1
]
nT
[
y n
n
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-32-2048.jpg)
![34
Example: Determine the unit impulse response of
the system characterized by the difference
equation
y[n] = 2.5y[n-1] – y[n-2] + x[n] – 5x[n-1] + 6x[n-2]
Solution: Taking the z-transform of both sides of
the above difference equation and ignoring all
initial conditions, we obtain the following pulse
transfer function:
1
2
1
1
1
2
1
1
1
1
2
1
1
1
2
1
2
1
z
1
z
5
.
2
1
z
1
z
3
1
z
2
1
z
1
z
3
1
z
2
1
z
z
5
.
2
1
z
6
z
5
1
)
z
(
H
and therefore
]
1
n
[
u
5
.
2
]
n
[
]
n
[
h
1
n
2
1
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-34-2048.jpg)
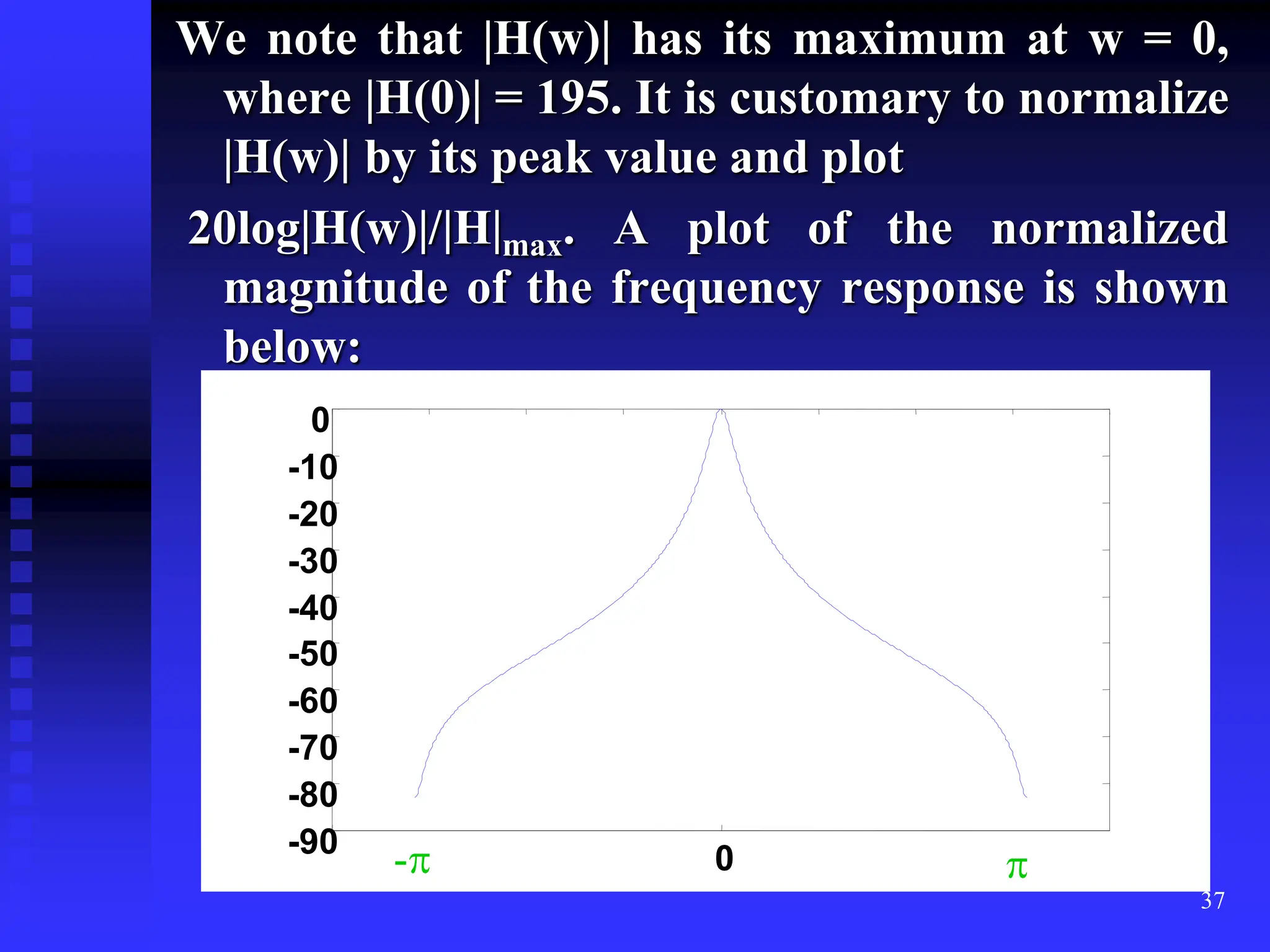
![36
Example: Determine the frequency response
function H(w) and the magnitude |H(w)|dB for the
LTI system characterized by the difference
equation
y[n] = 1.8y[n-1] – 0.81y[n-2] + x[n] + 0.95x[n-1]
Solution: The pulse transfer function is
2
1
1
2
1
1
z
9
.
0
1
z
95
.
0
1
z
81
.
0
z
8
.
1
1
z
95
.
0
1
)
z
(
H
Now the frequency response function may be obtained as
2
jw
jw
e
9
.
0
1
e
95
.
0
1
w
H
The magnitude response is
w
cos
8
.
1
81
.
1
w
cos
9
.
1
9025
.
1
|
)
w
(
H
|
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-36-2048.jpg)
![38
Example: Find the frequency response for the
system
y[n] = -0.1y[n-1] + 0.2y[n-2] + x[n] + x[n-1]
Solution: The system function is
2
1
1
z
2
.
0
z
1
.
0
1
z
1
)
z
(
H
Now
)
z
z
(
2
.
0
)
z
z
(
08
.
0
05
.
1
z
z
2
z
2
.
0
z
1
.
0
1
z
1
z
2
.
0
z
1
.
0
1
z
1
)
z
(
H
)
z
(
H 2
2
1
1
2
2
1
1
1
w
cos
8
.
0
w
cos
16
.
0
45
.
1
w
cos
2
2
|
)
z
(
H
)
z
(
H
|
|
)
w
(
H
| 2
e
z
1
2
jw
w
cos
8
.
0
w
cos
16
.
0
45
.
1
w
cos
2
2
|
)
w
(
H
| 2
](https://image.slidesharecdn.com/lecz-transform-240123171651-ec7c8102/75/Z-transform-and-Properties-of-Z-Transform-38-2048.jpg)