Downloaded 1,667 times
![SSD: Single Shot MultiBox Detector
Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, Scott Reed,
Cheng-Yang Fu, Alexander C.Berg
[arXiv][demo][code] (Mar 2016)
Slides by Míriam Bellver
Computer Vision Reading Group, UPC
28th October, 2016](https://image.slidesharecdn.com/05-singleshotmultiboxdetector-161028144820/75/SSD-Single-Shot-MultiBox-Detector-UPC-Reading-Group-1-2048.jpg)
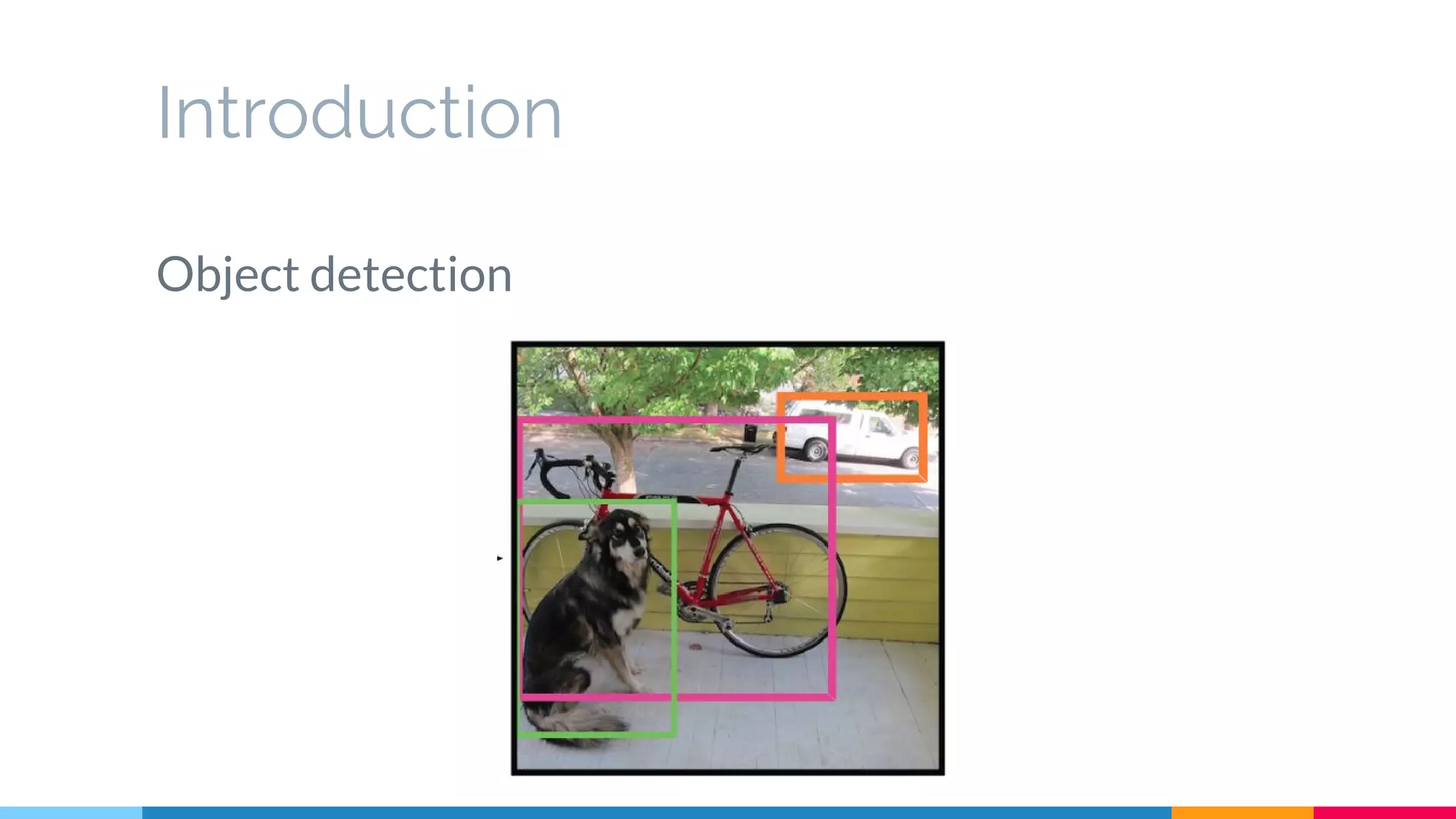
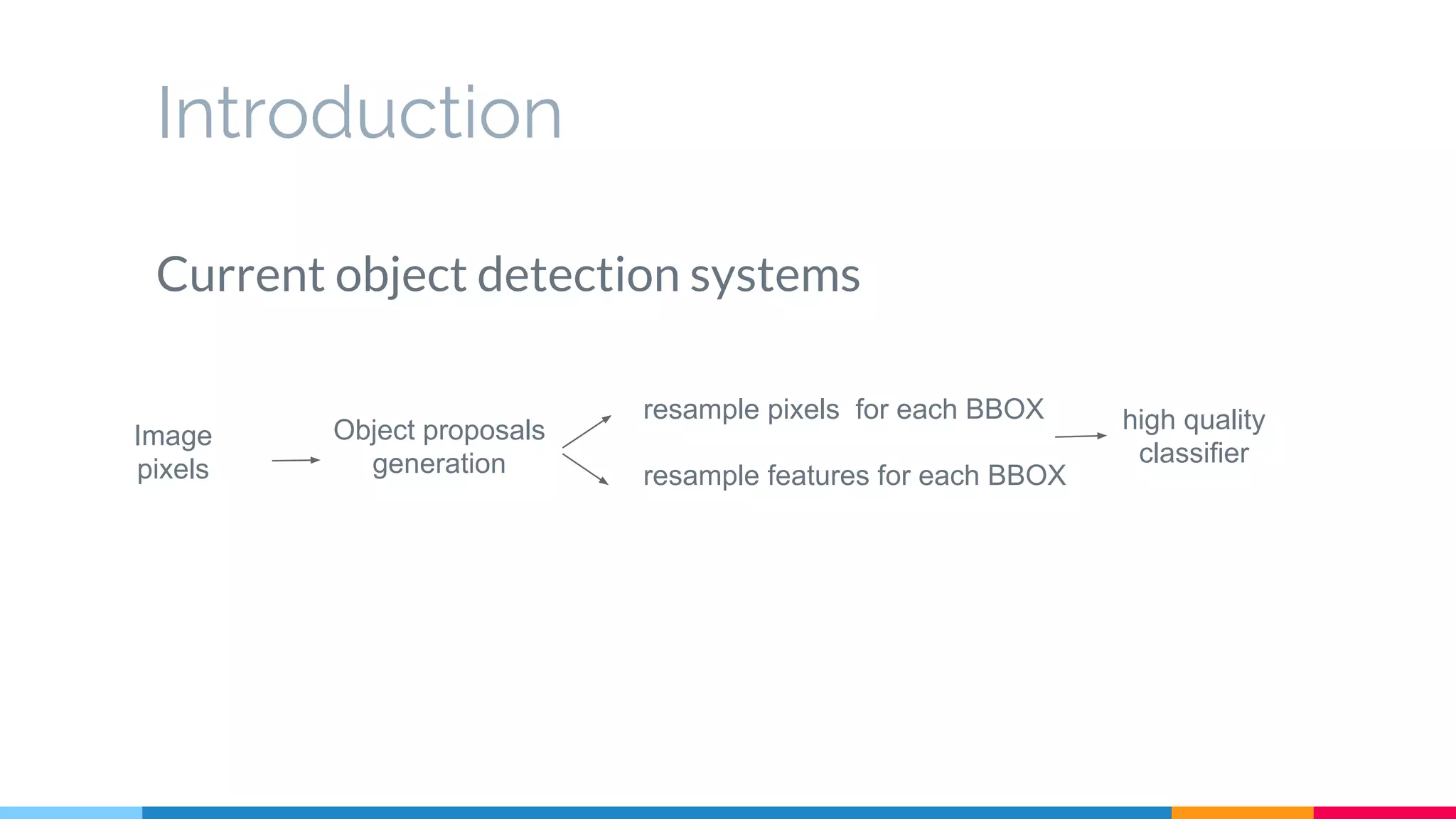
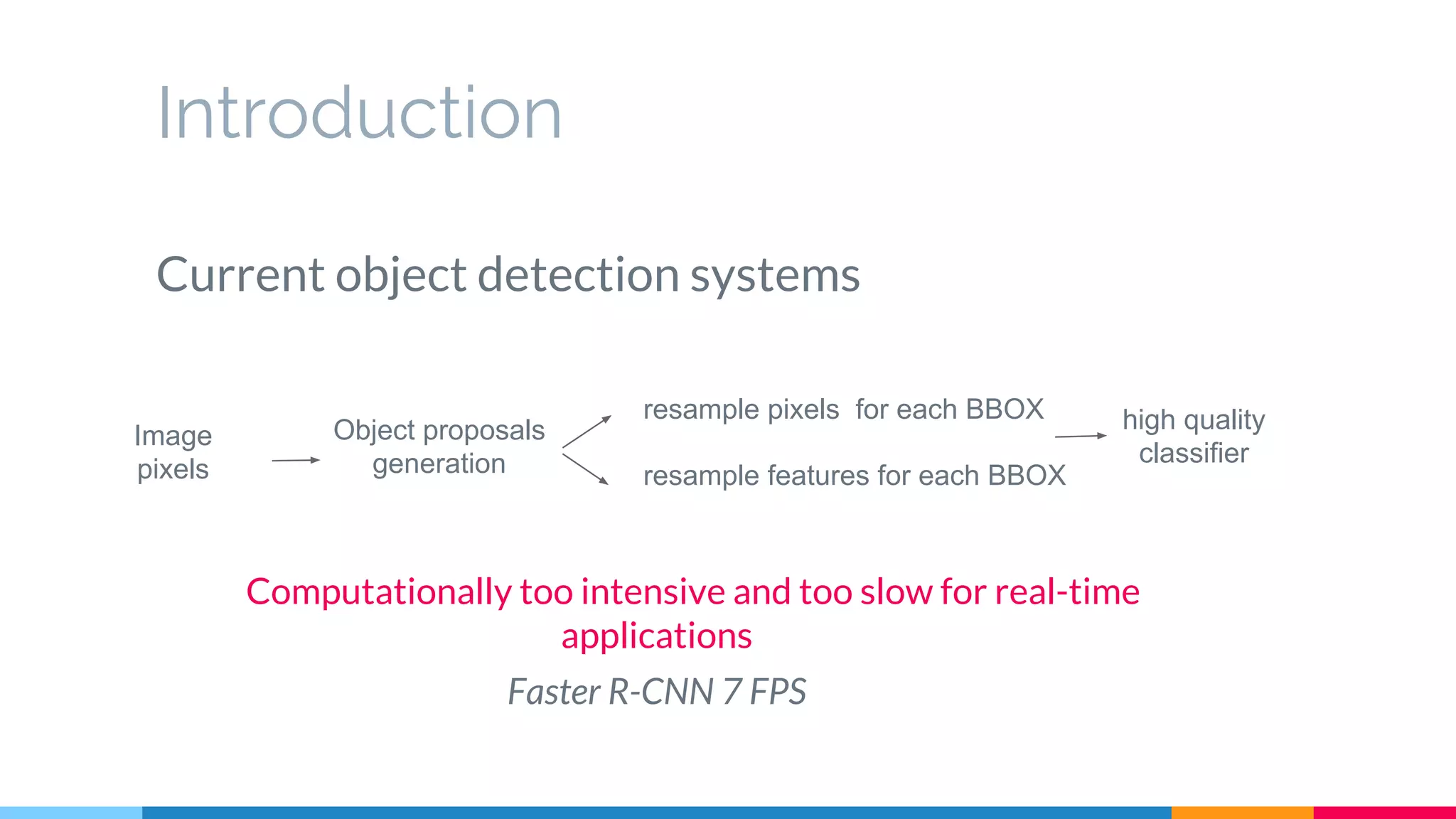
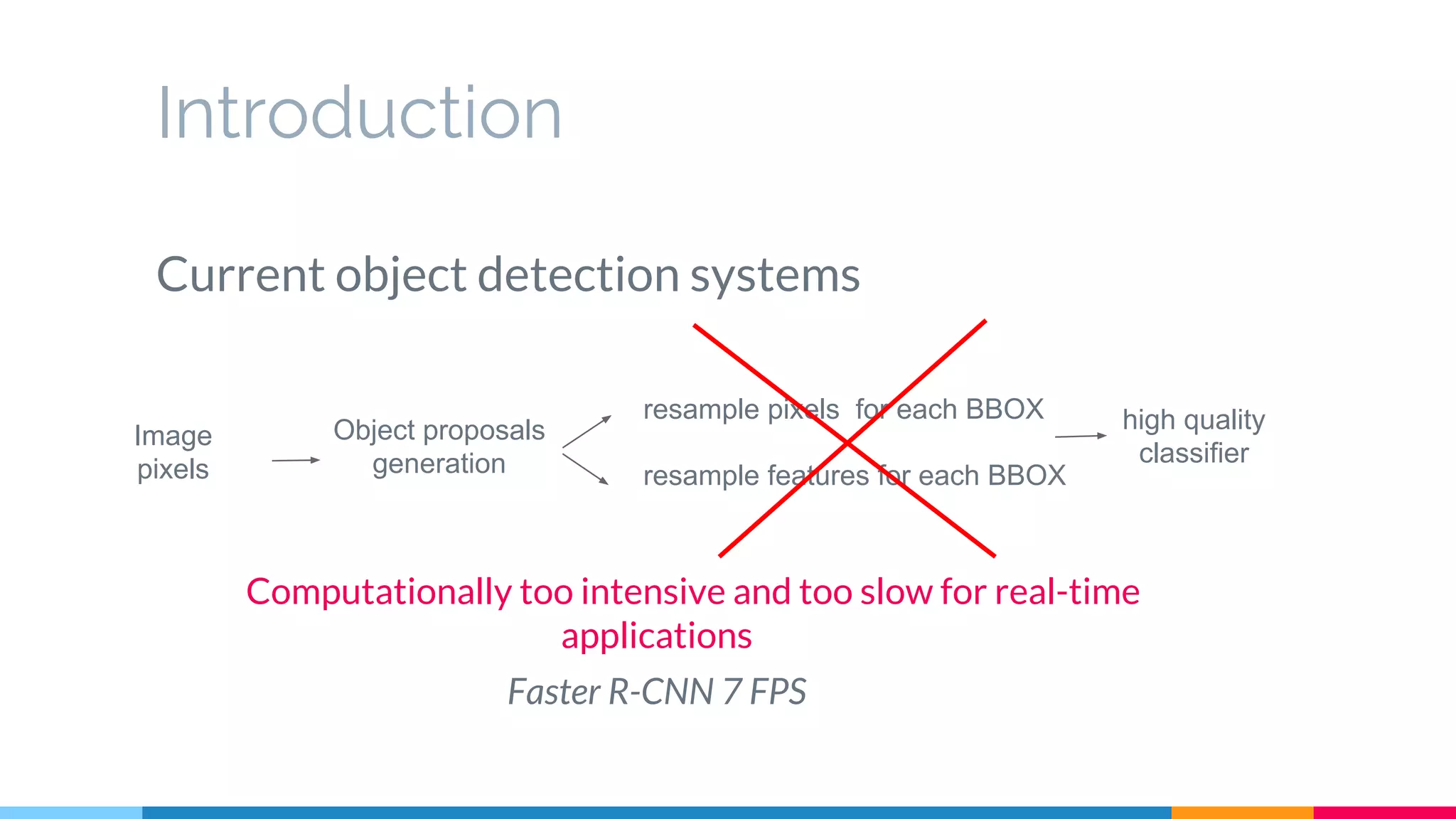
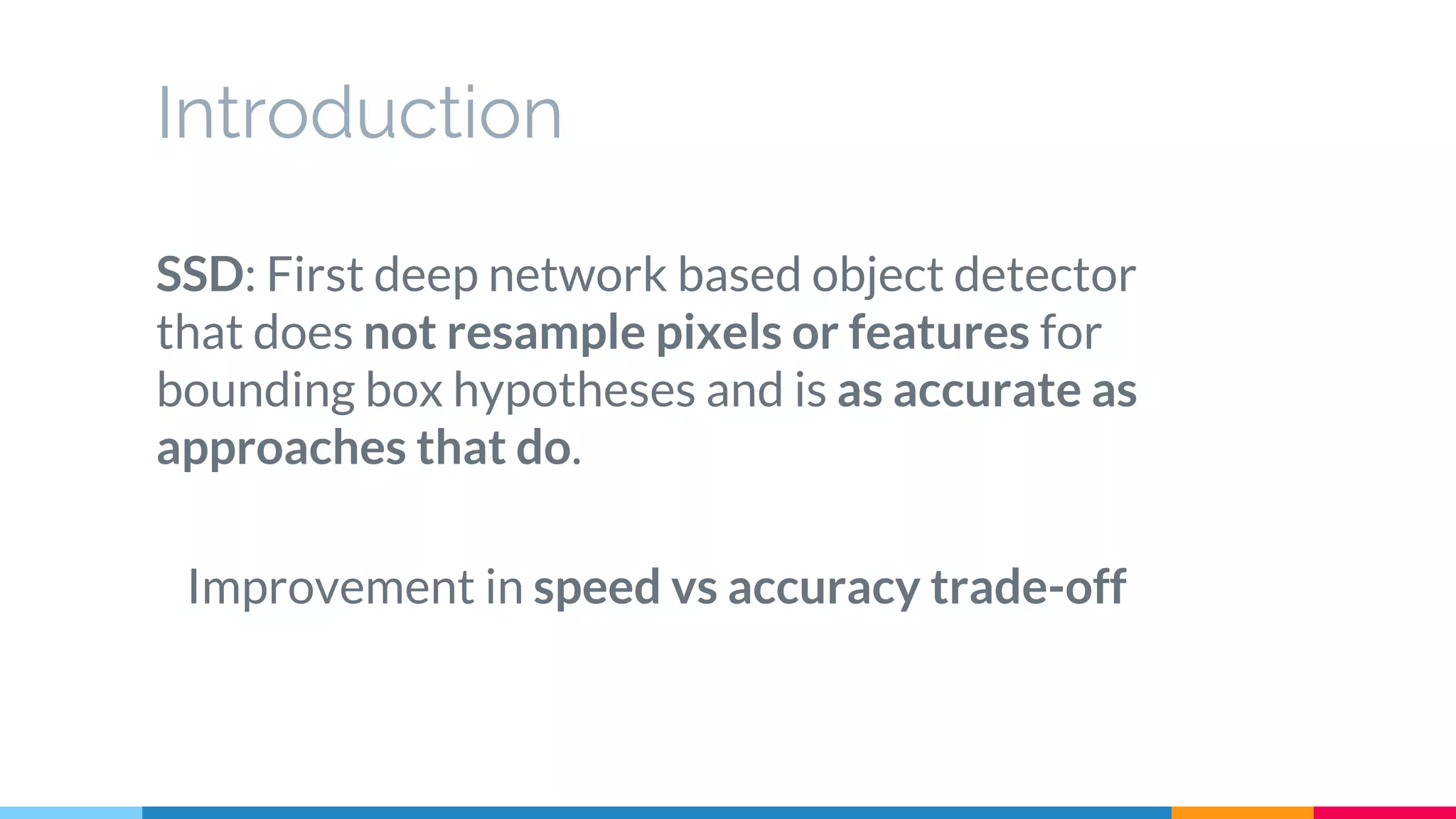
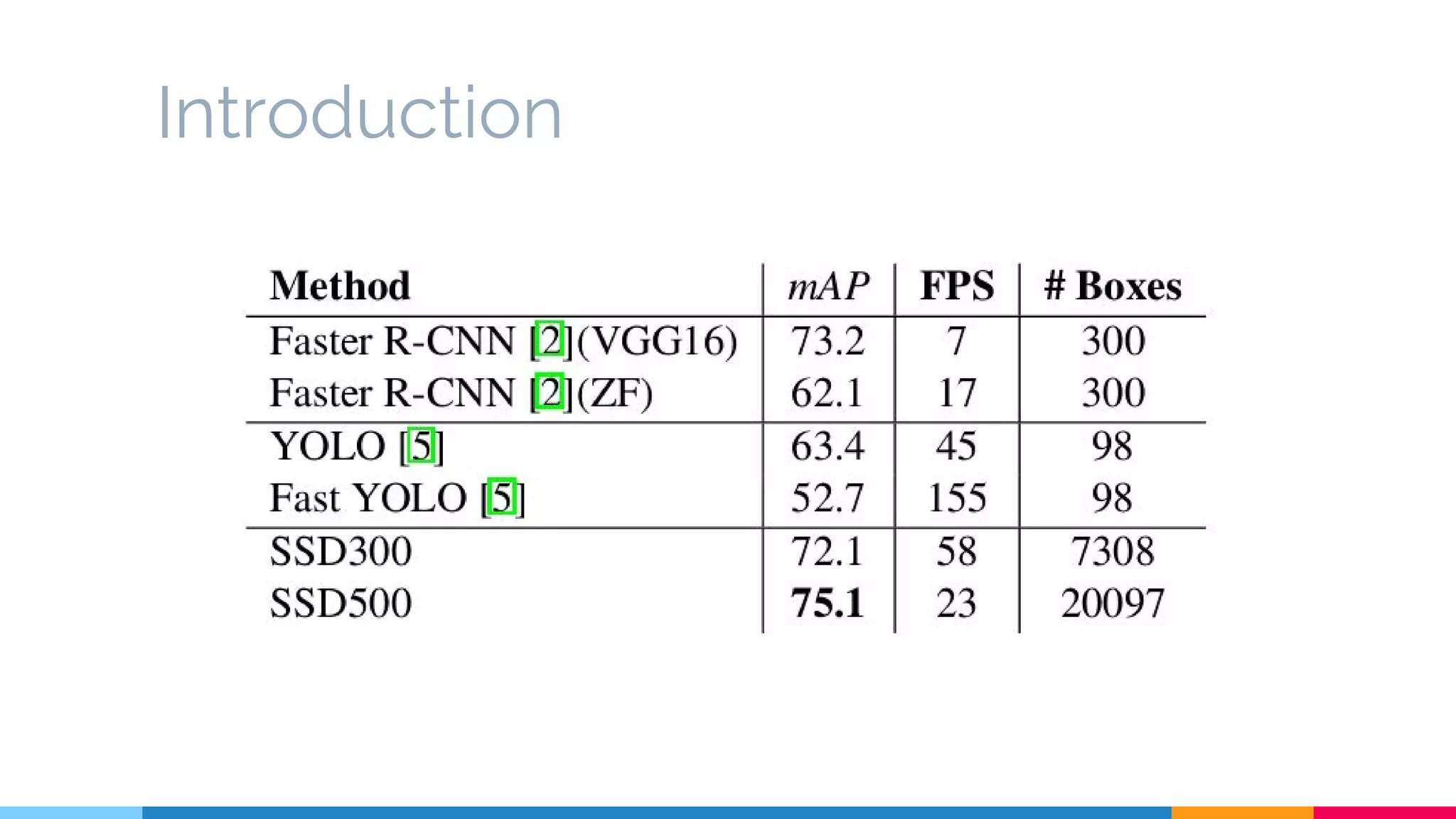
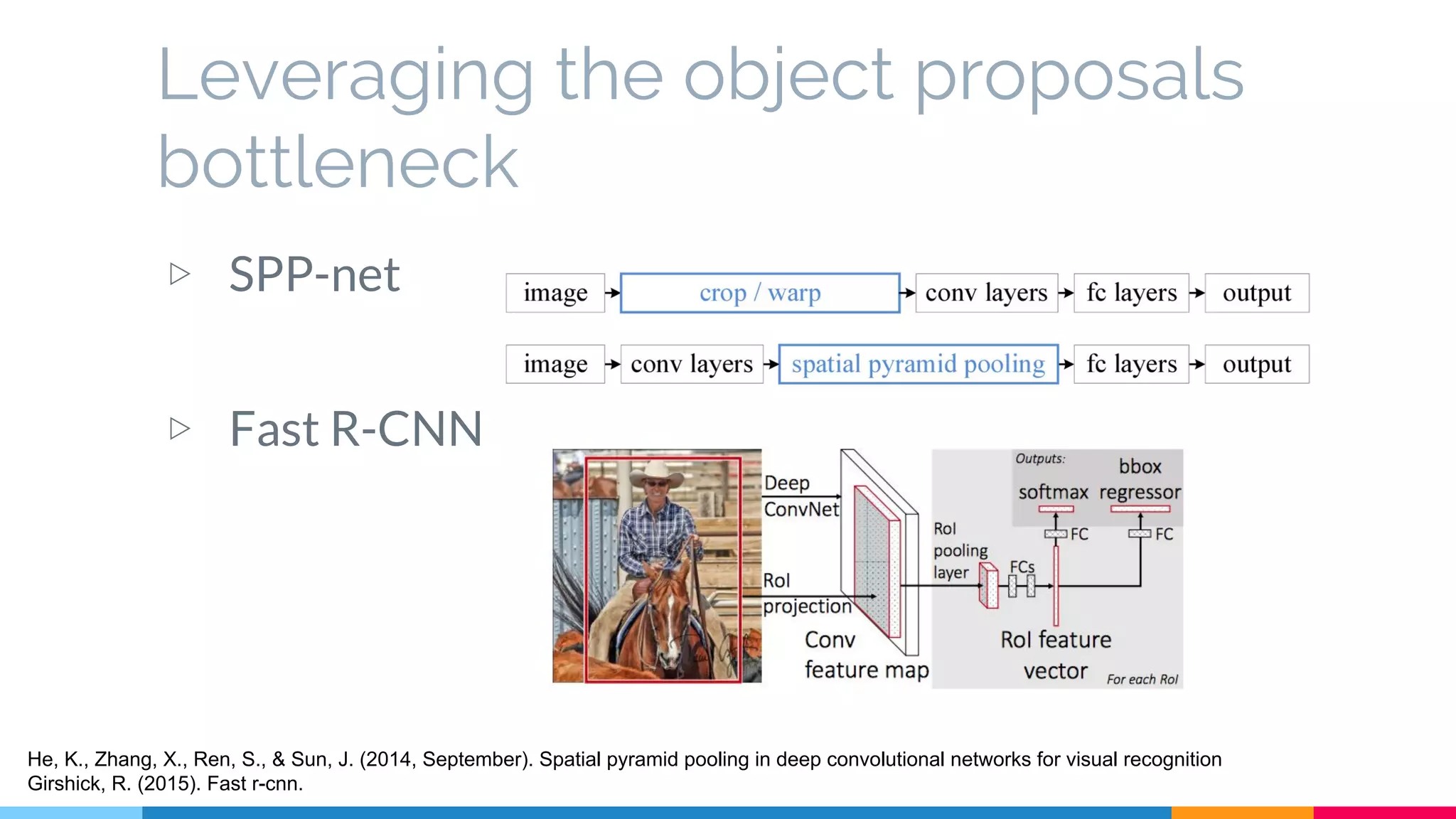
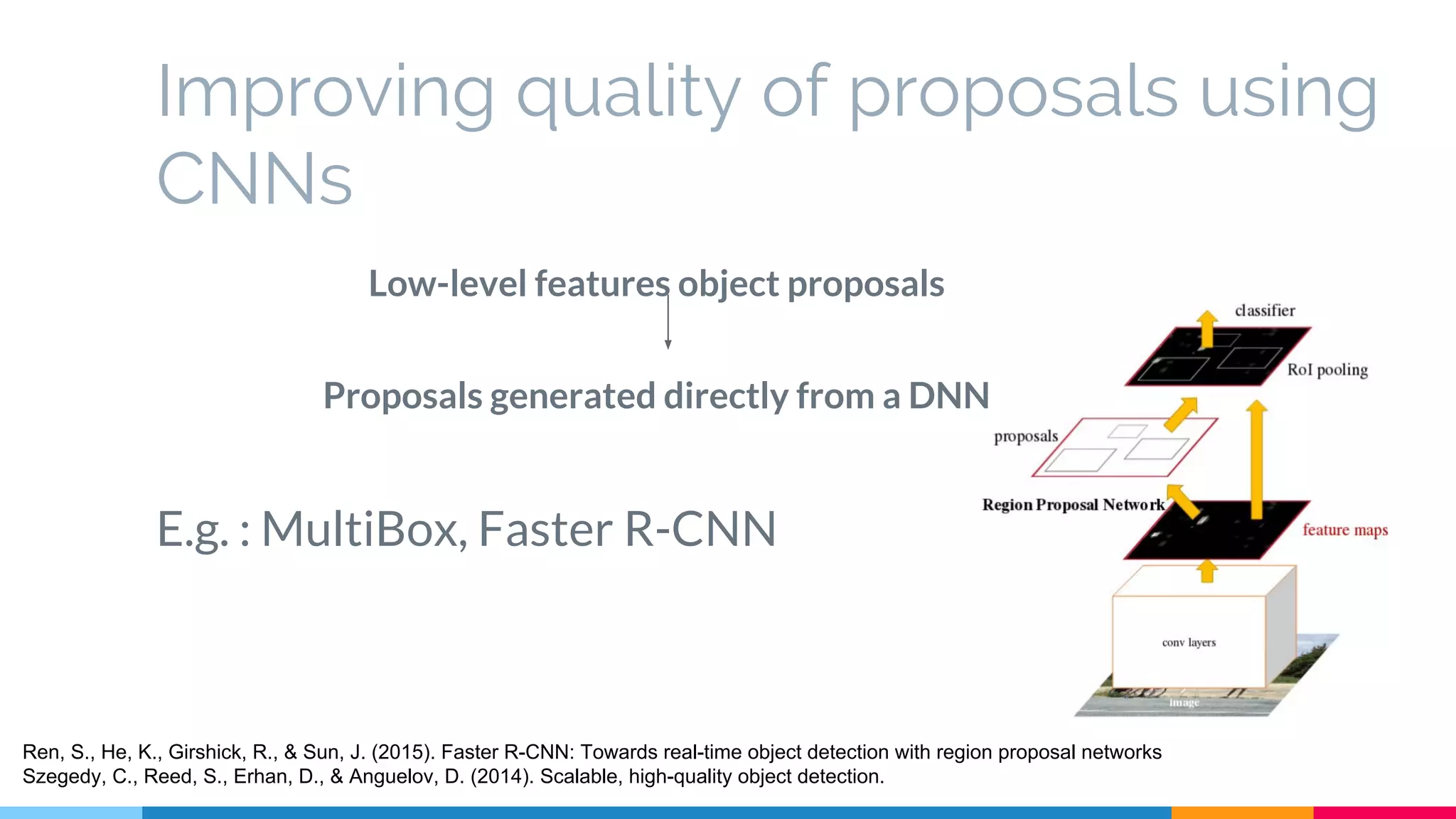
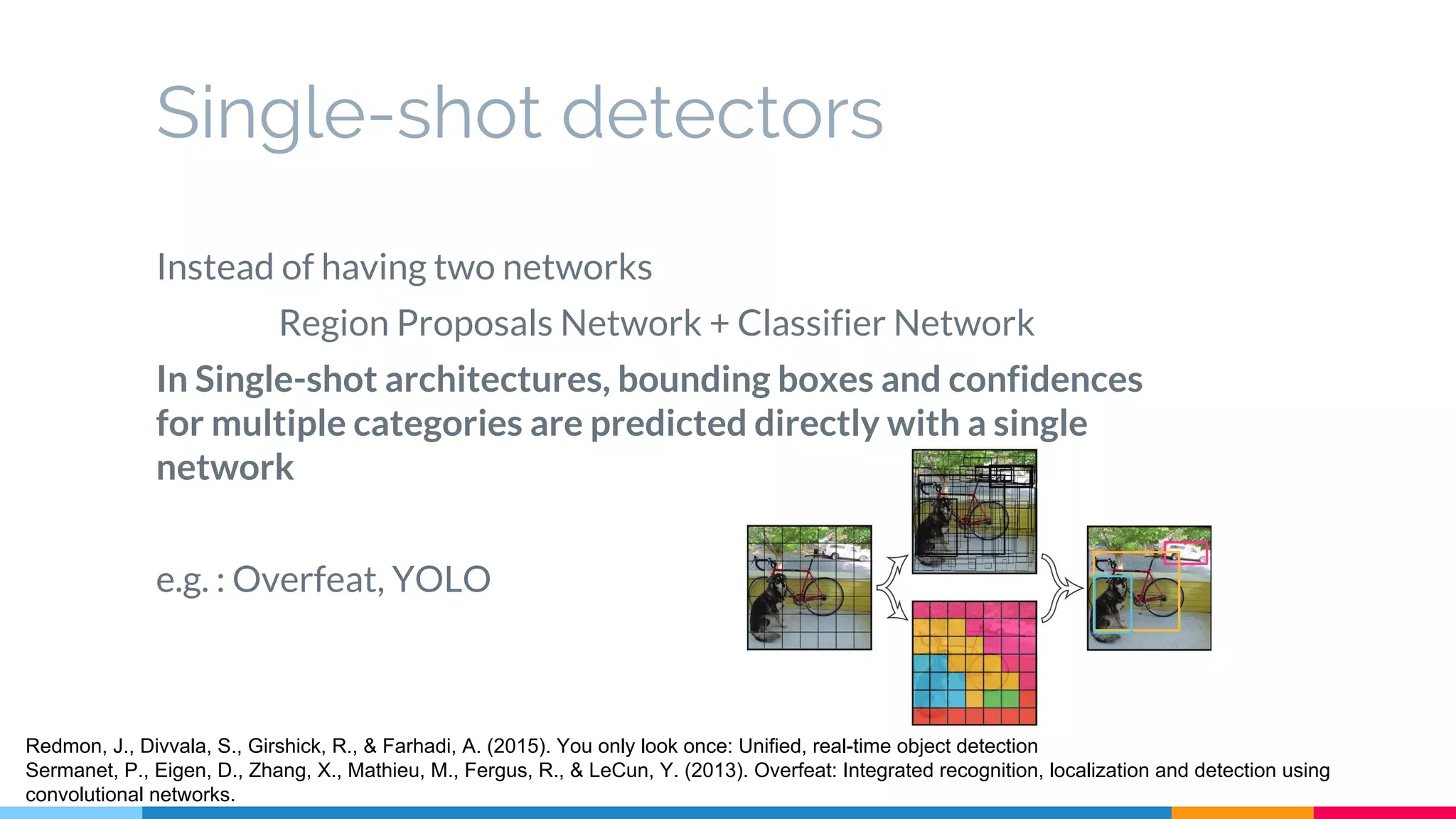
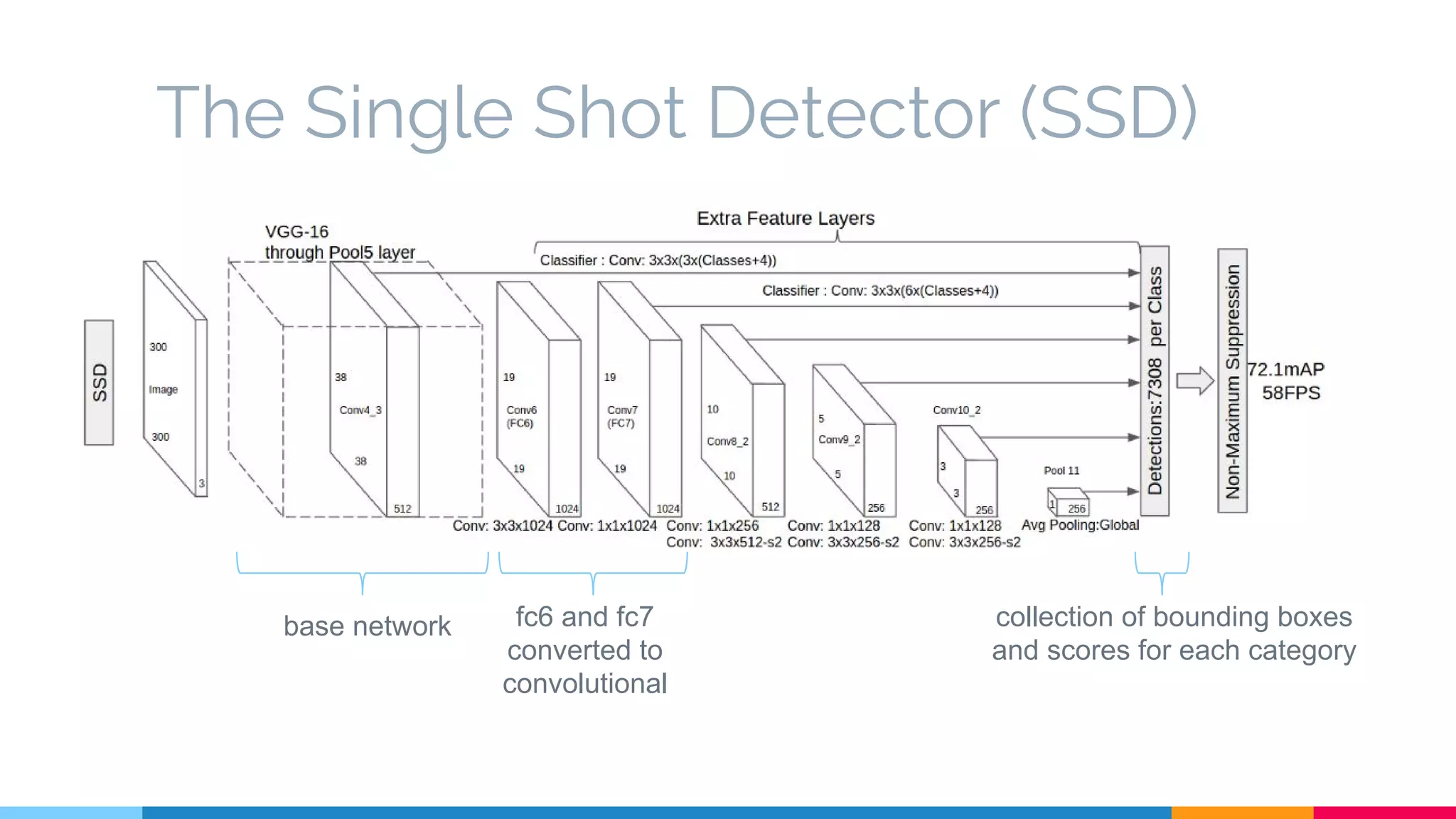
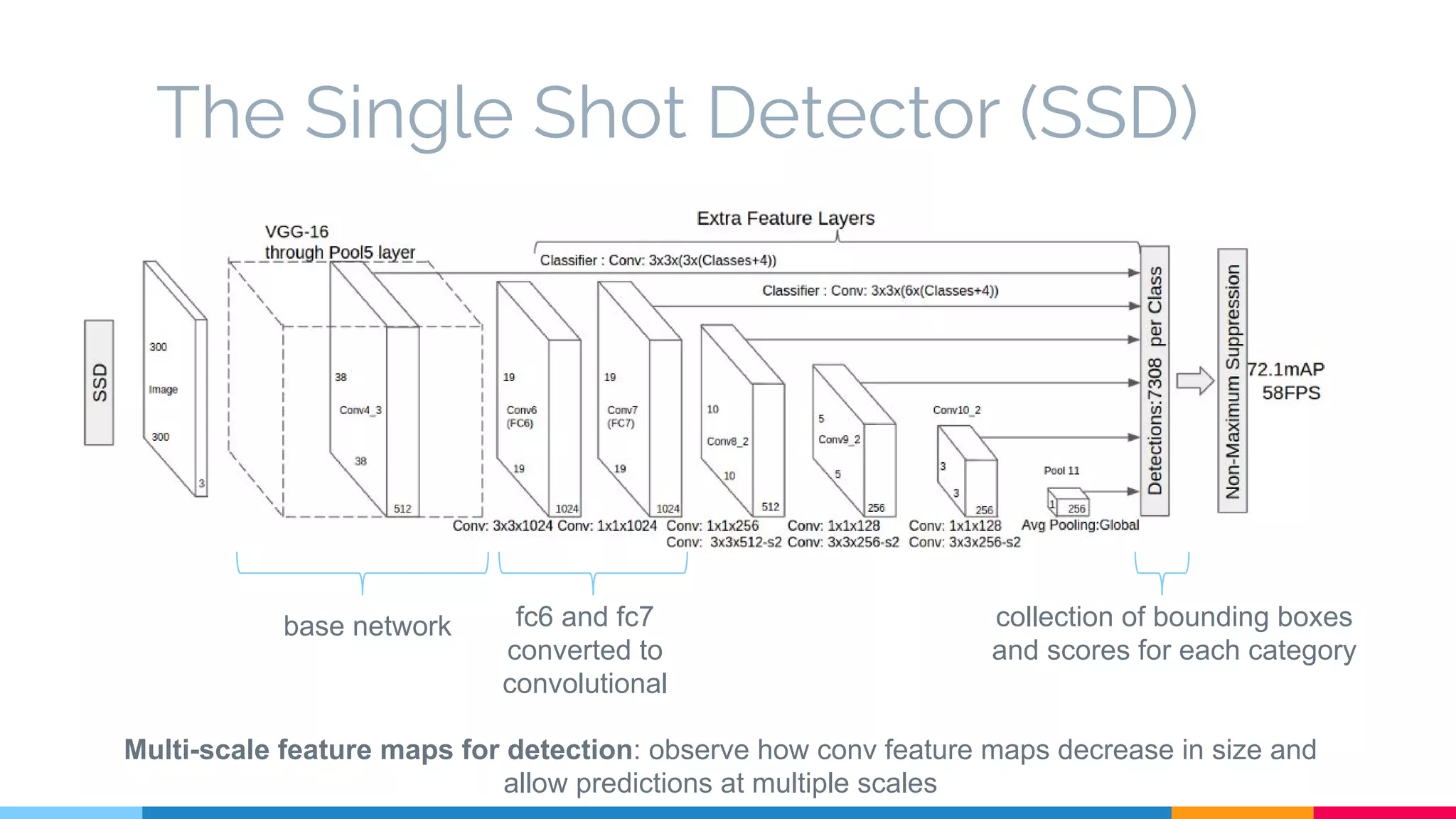
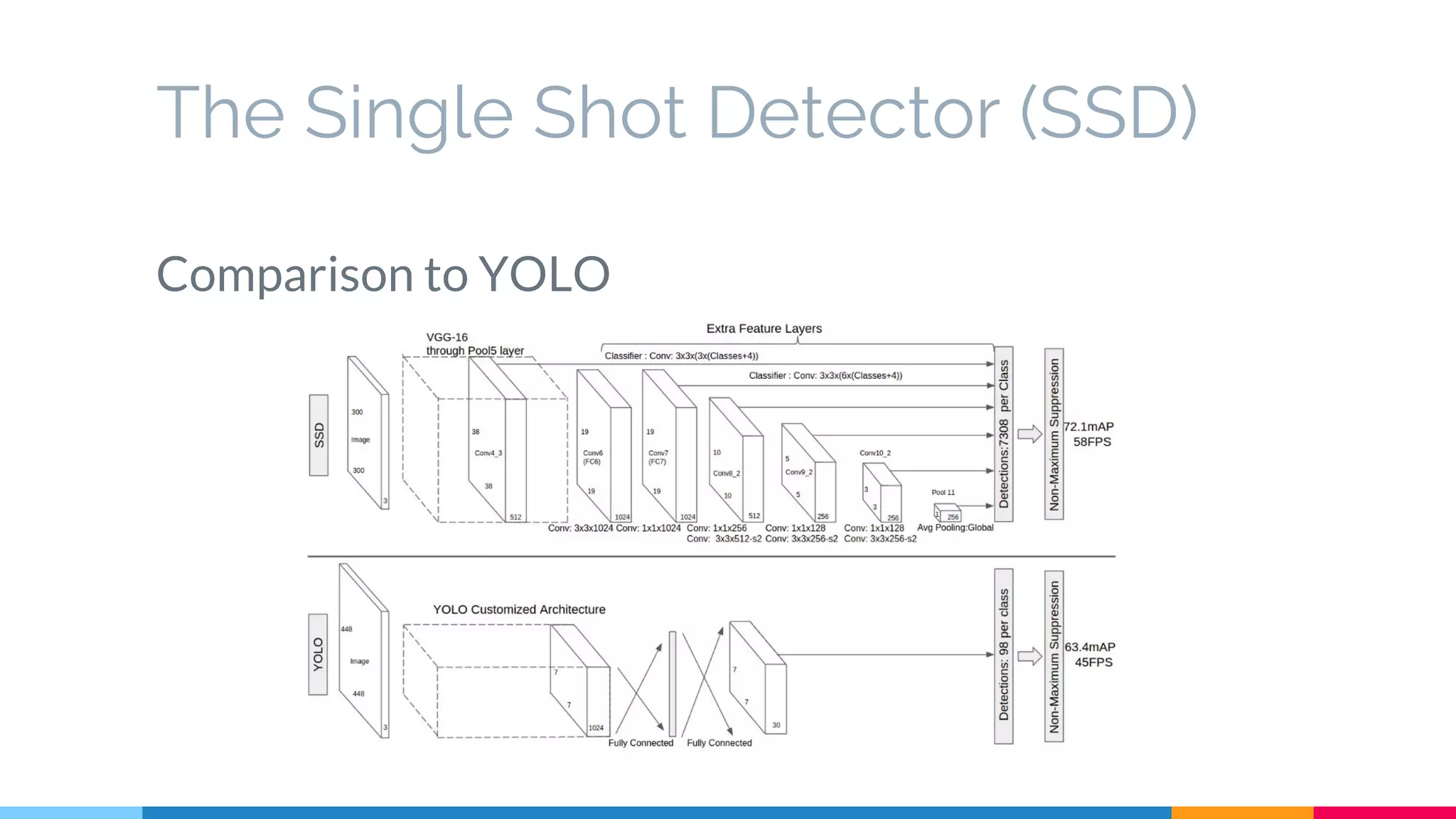
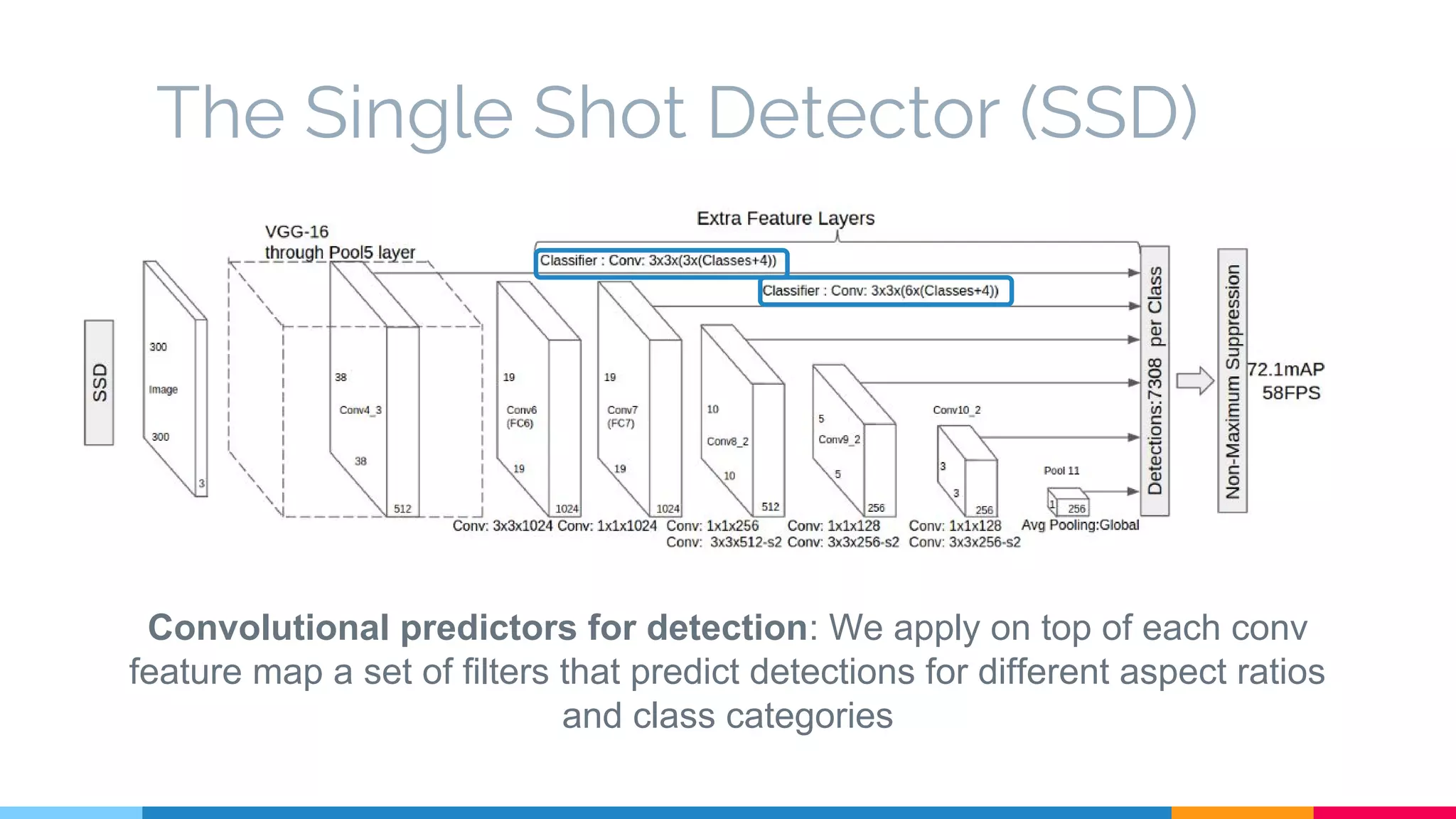
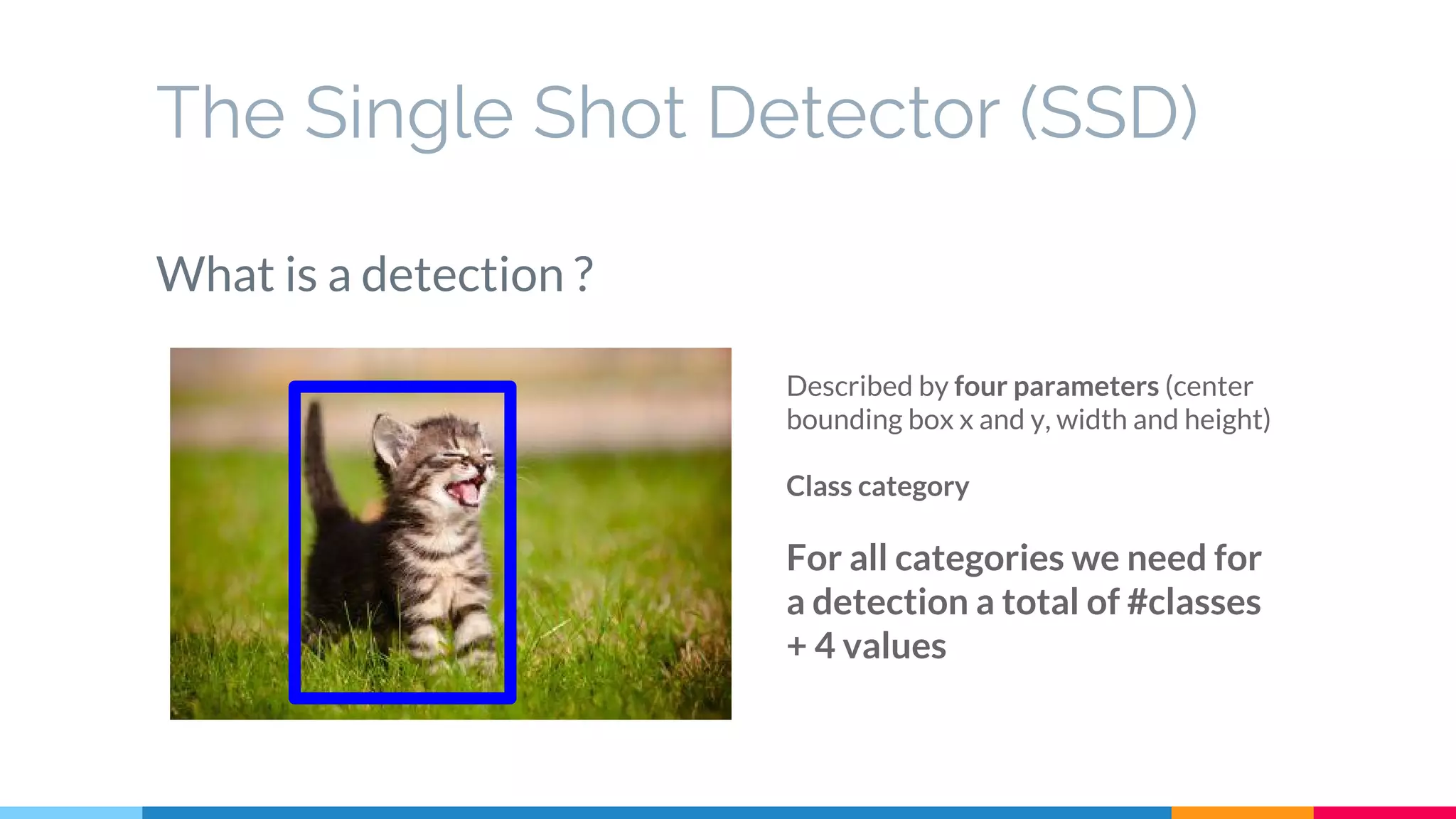

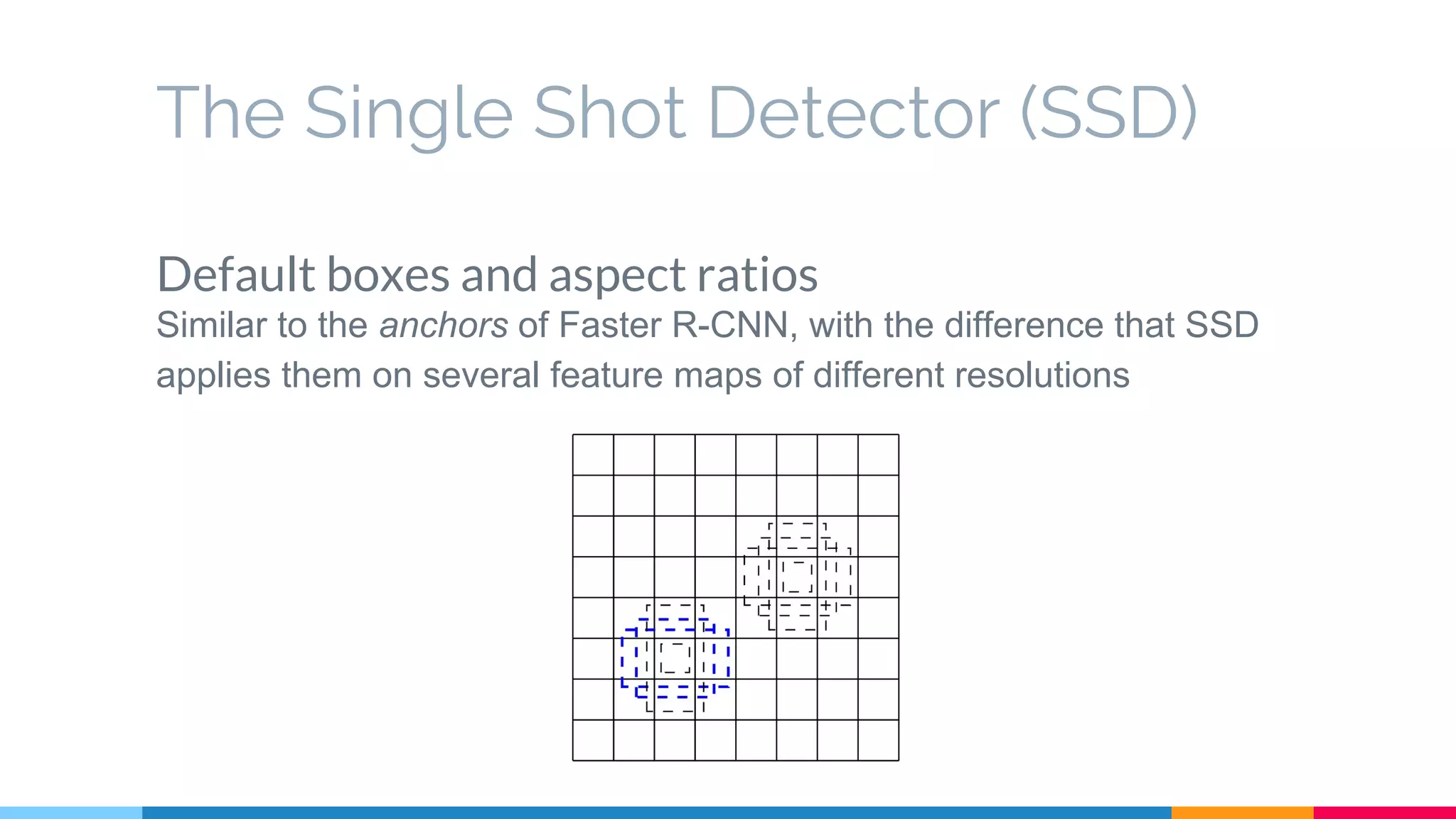
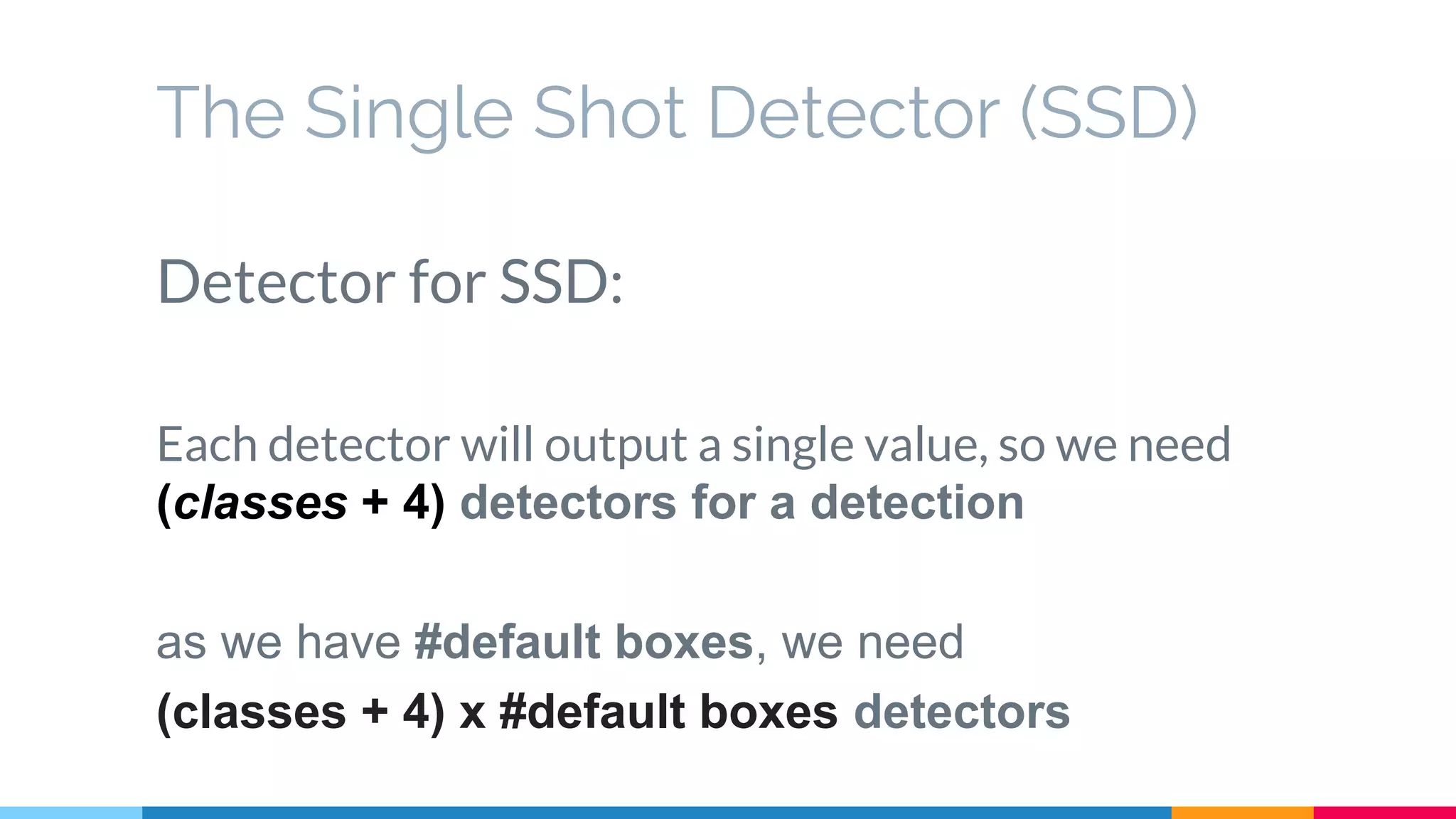
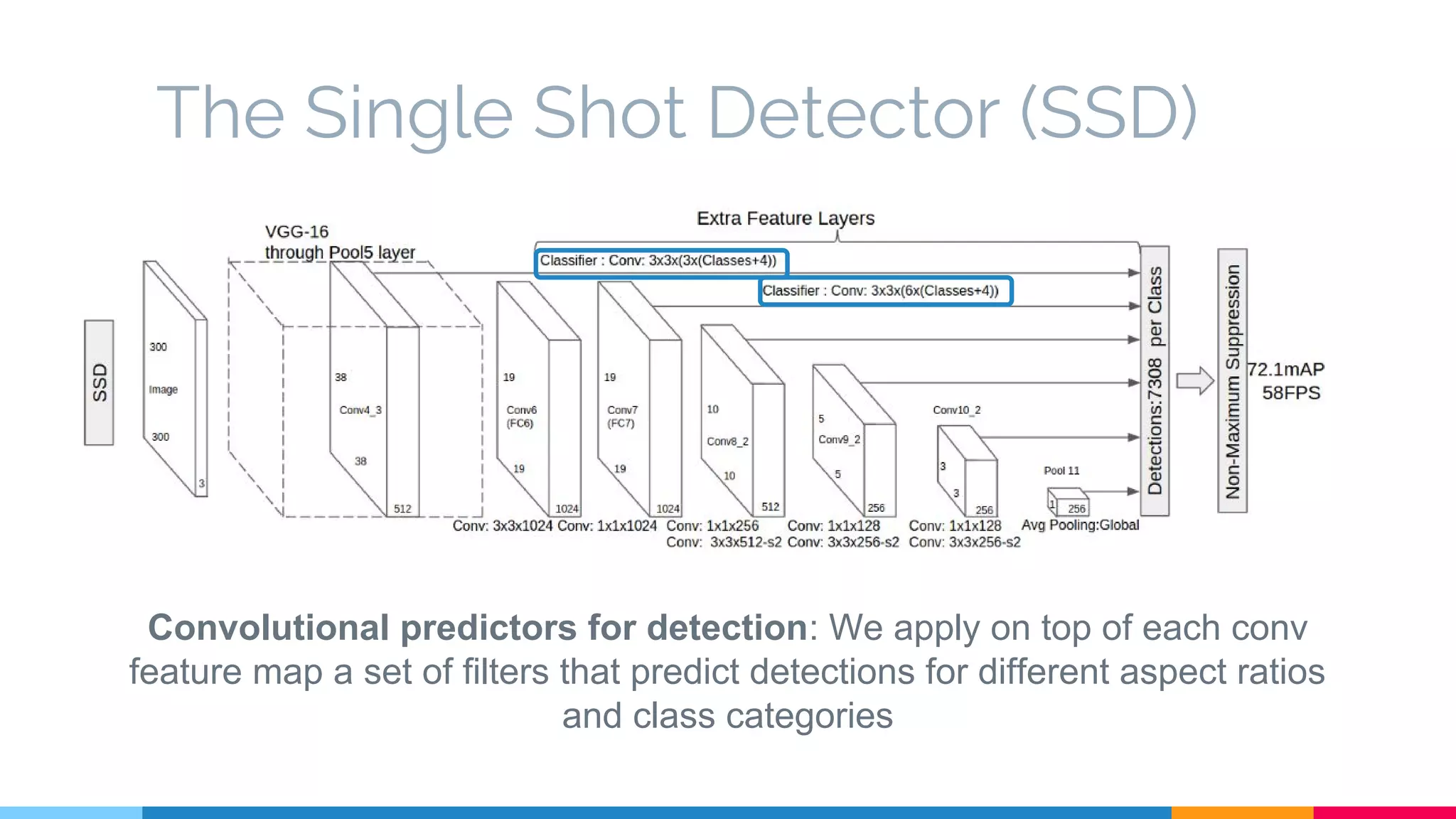
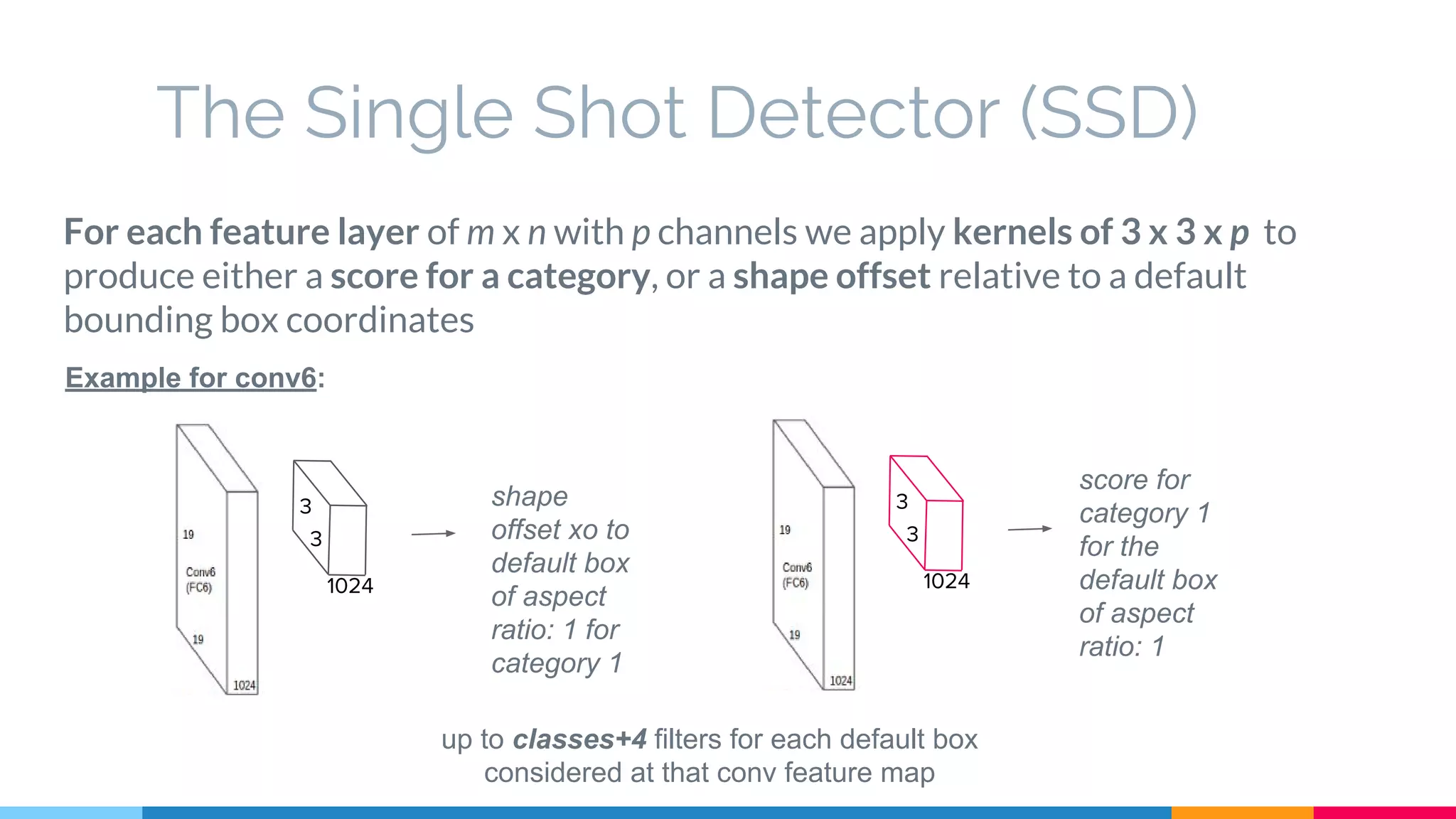
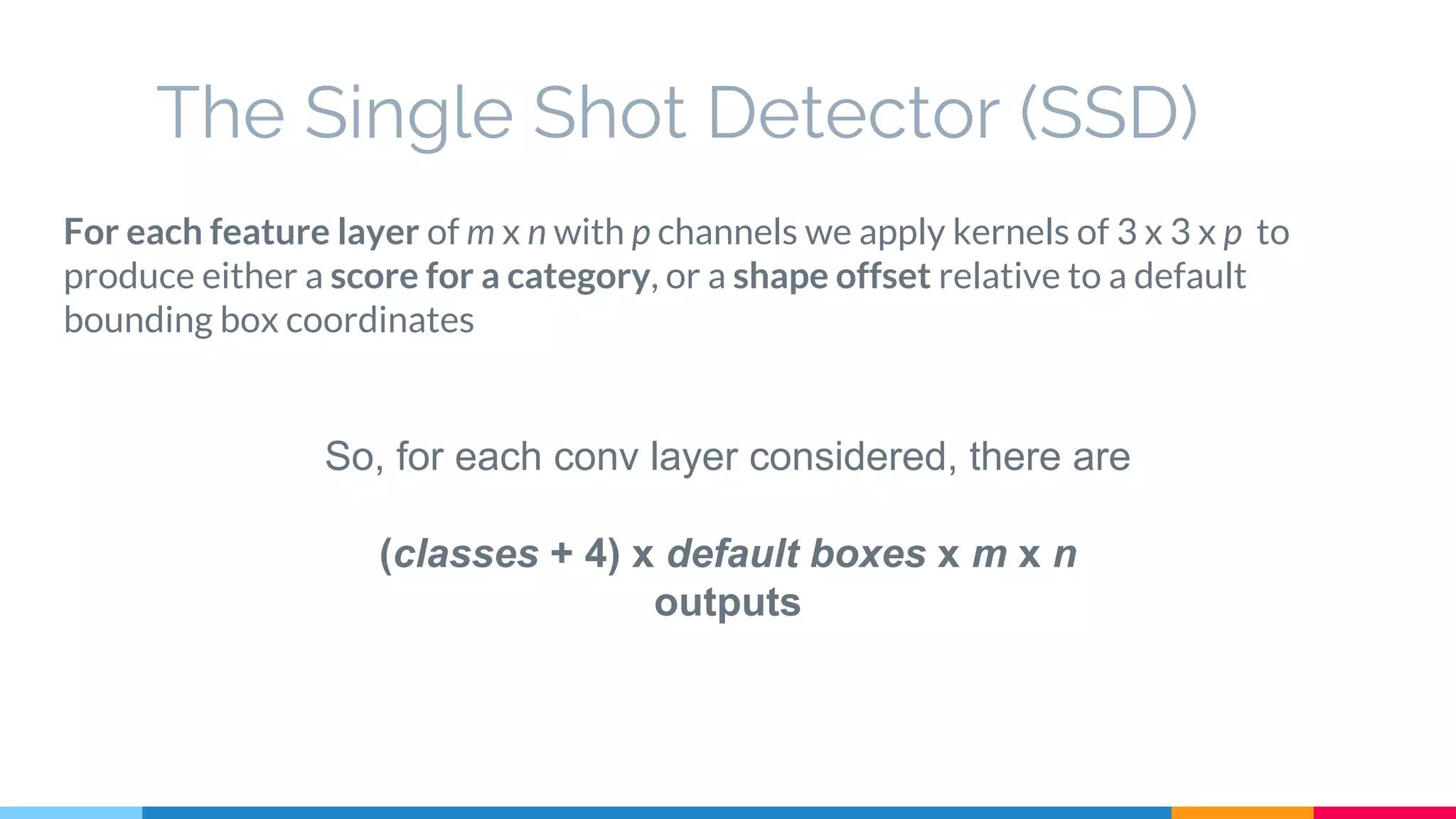

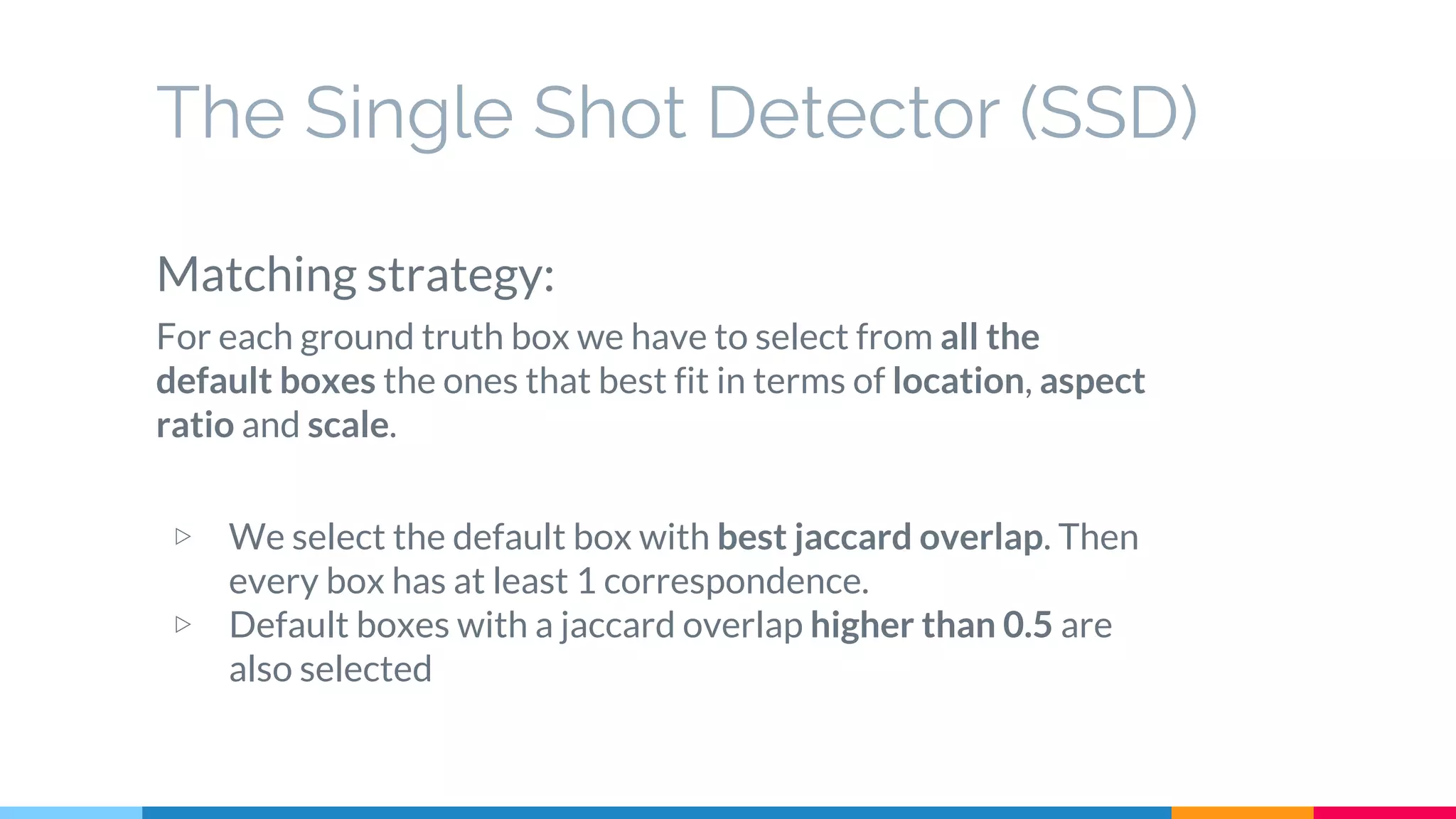
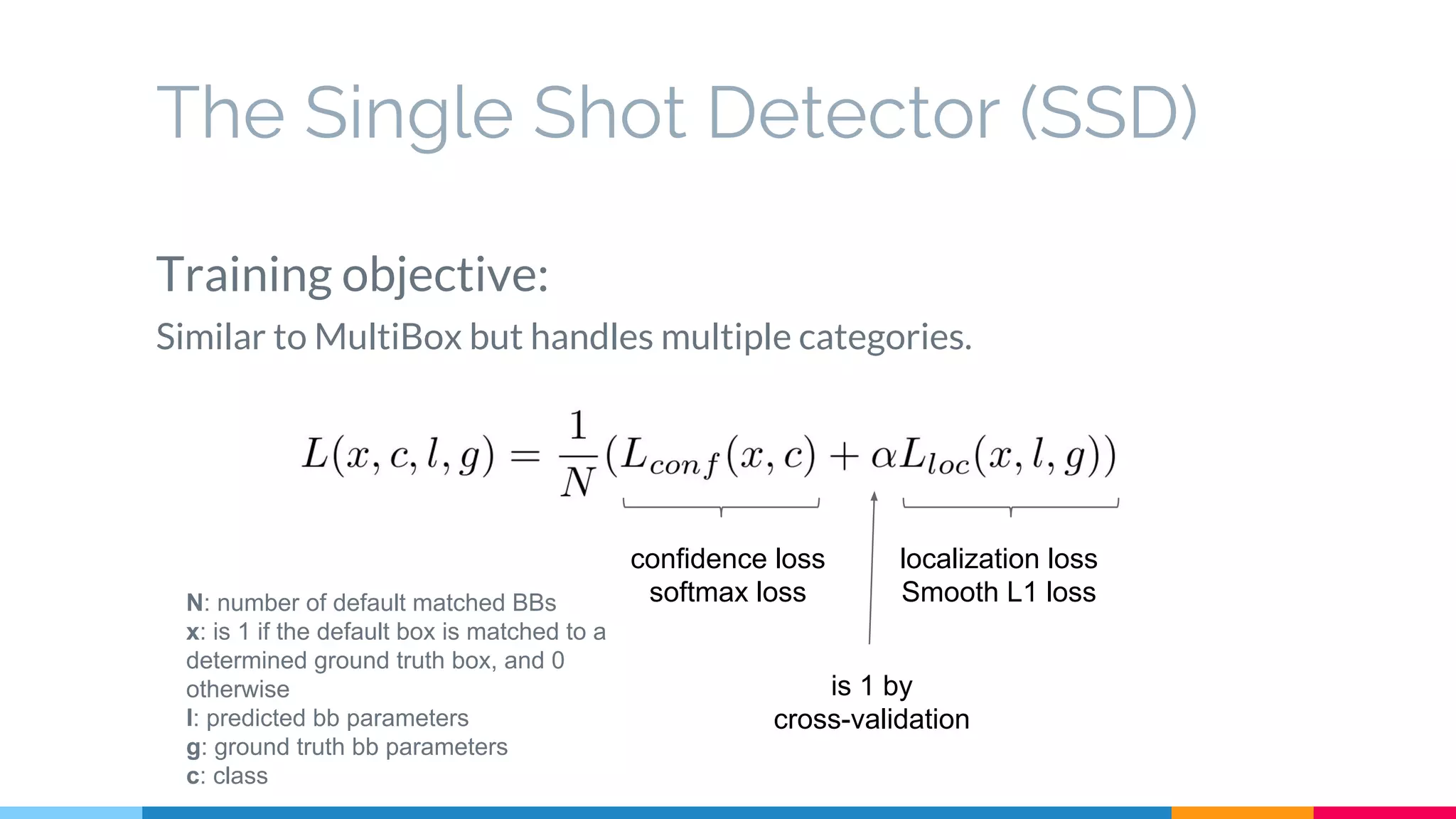
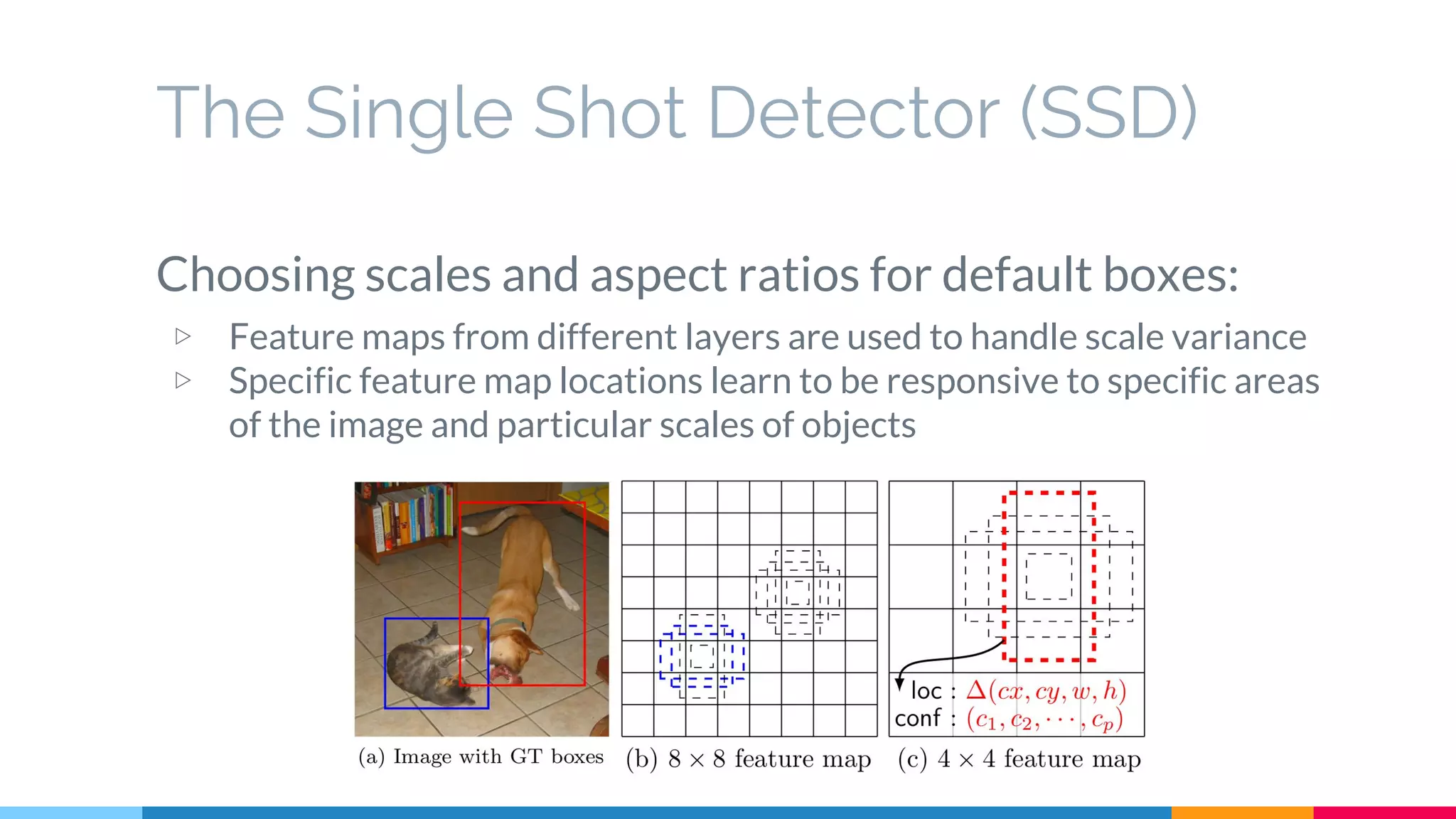
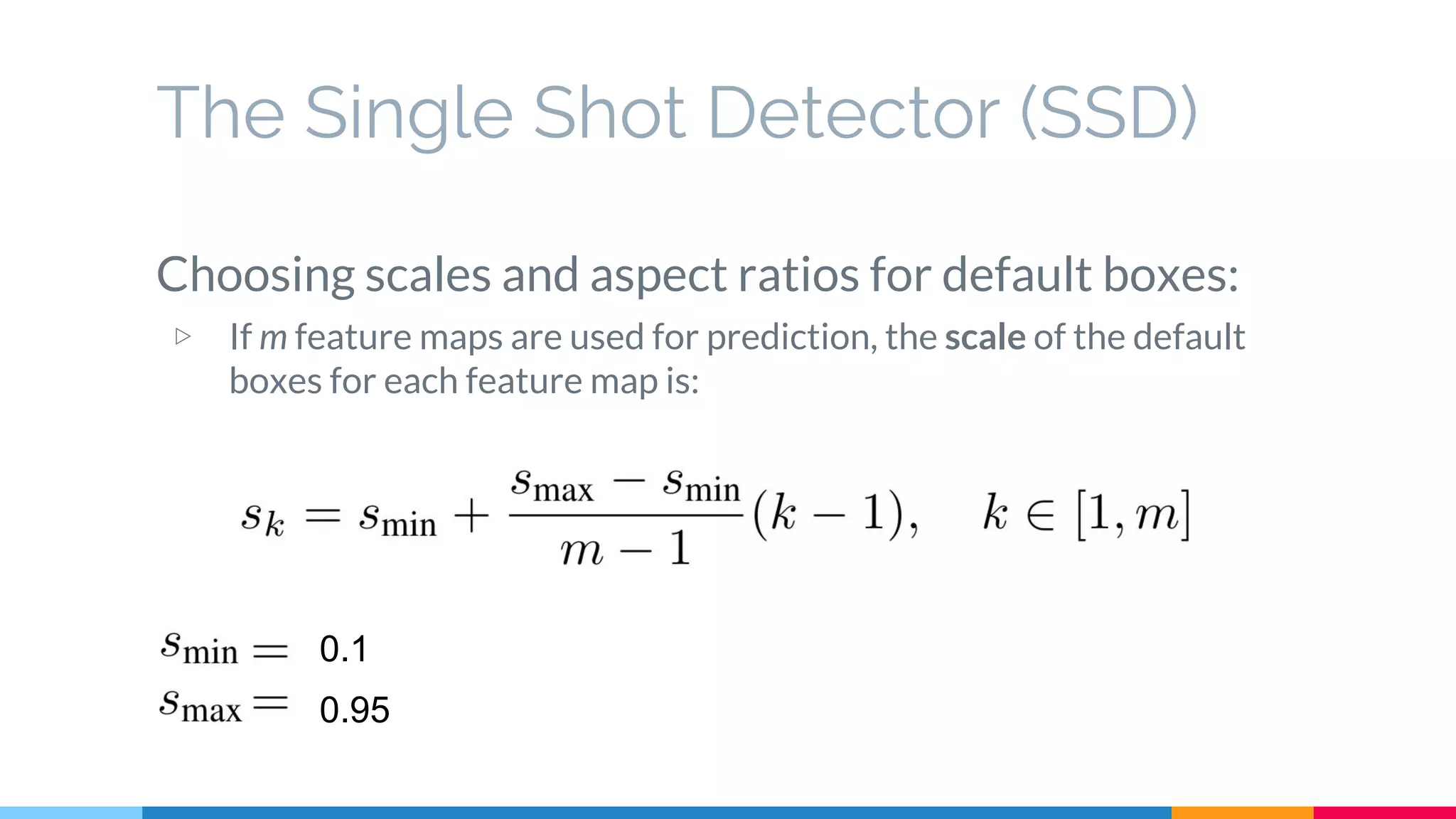
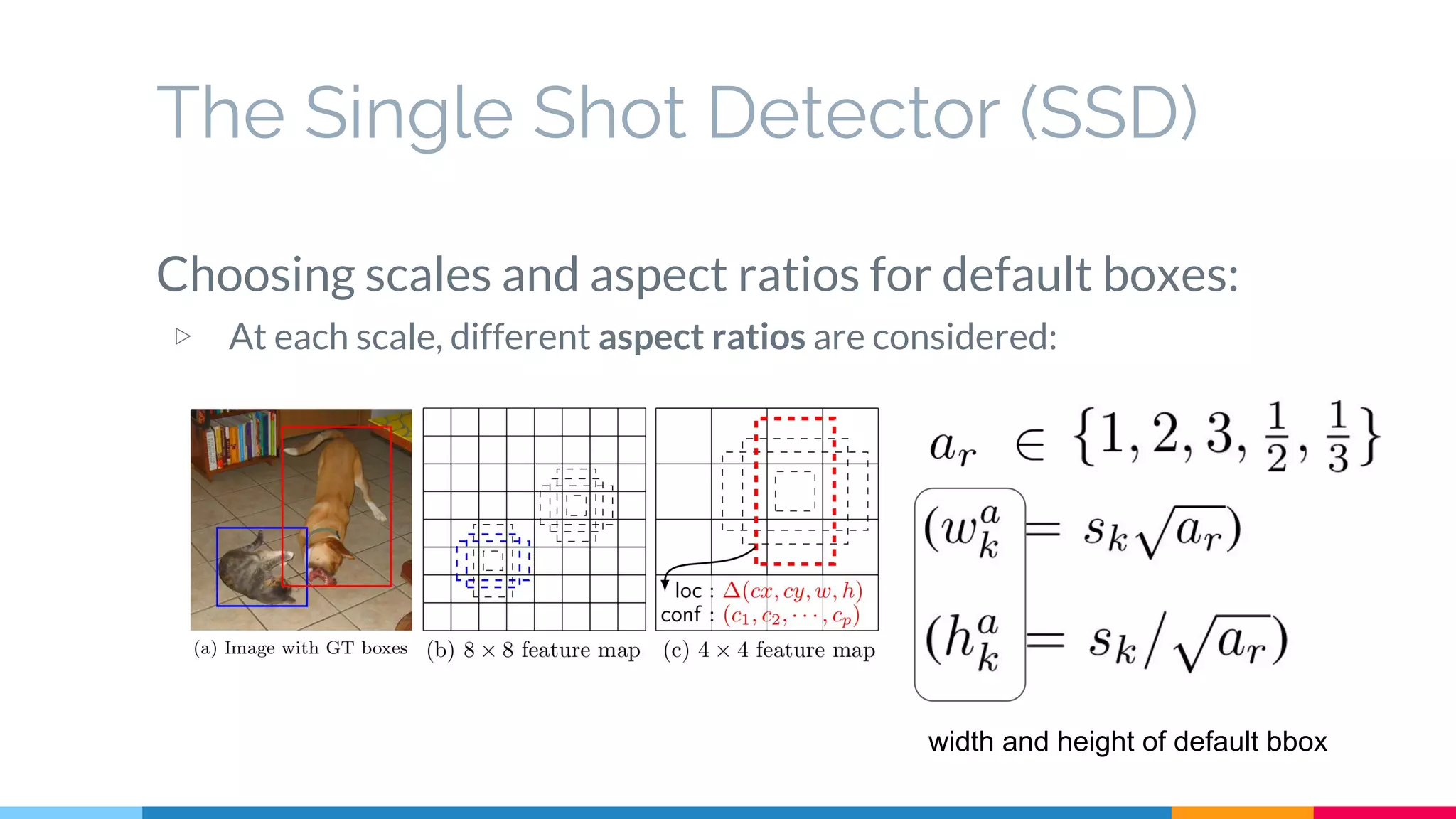
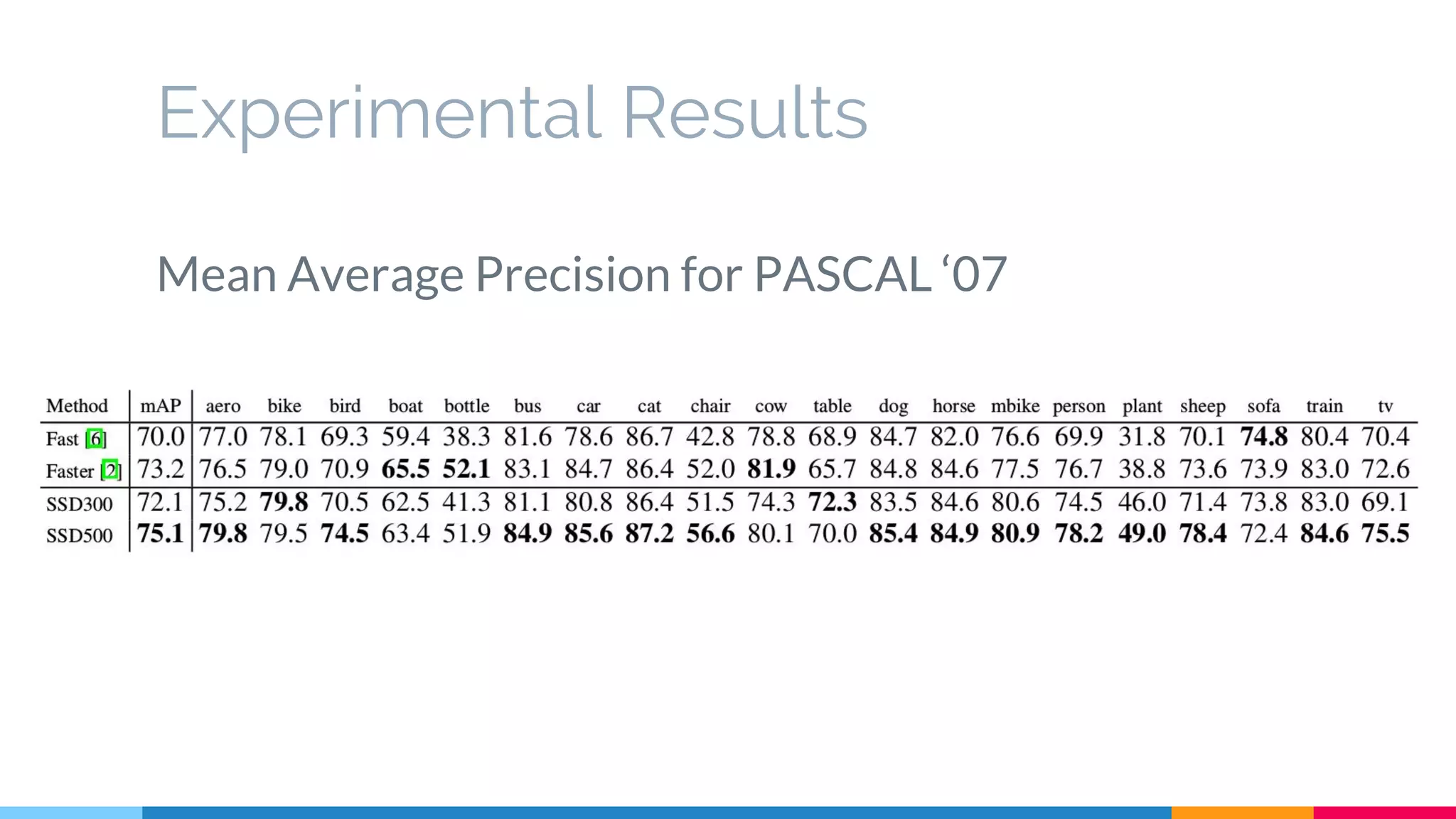
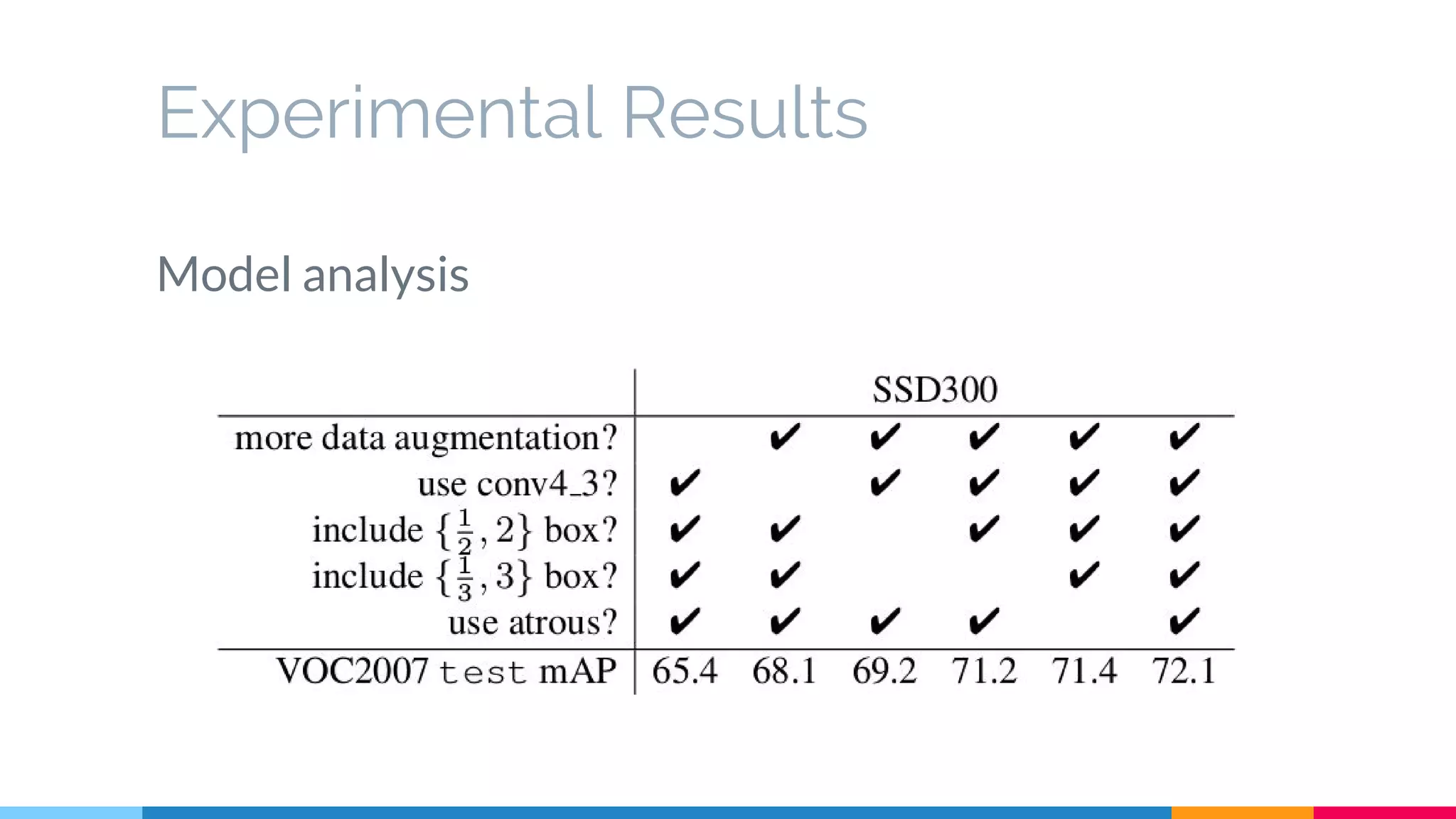
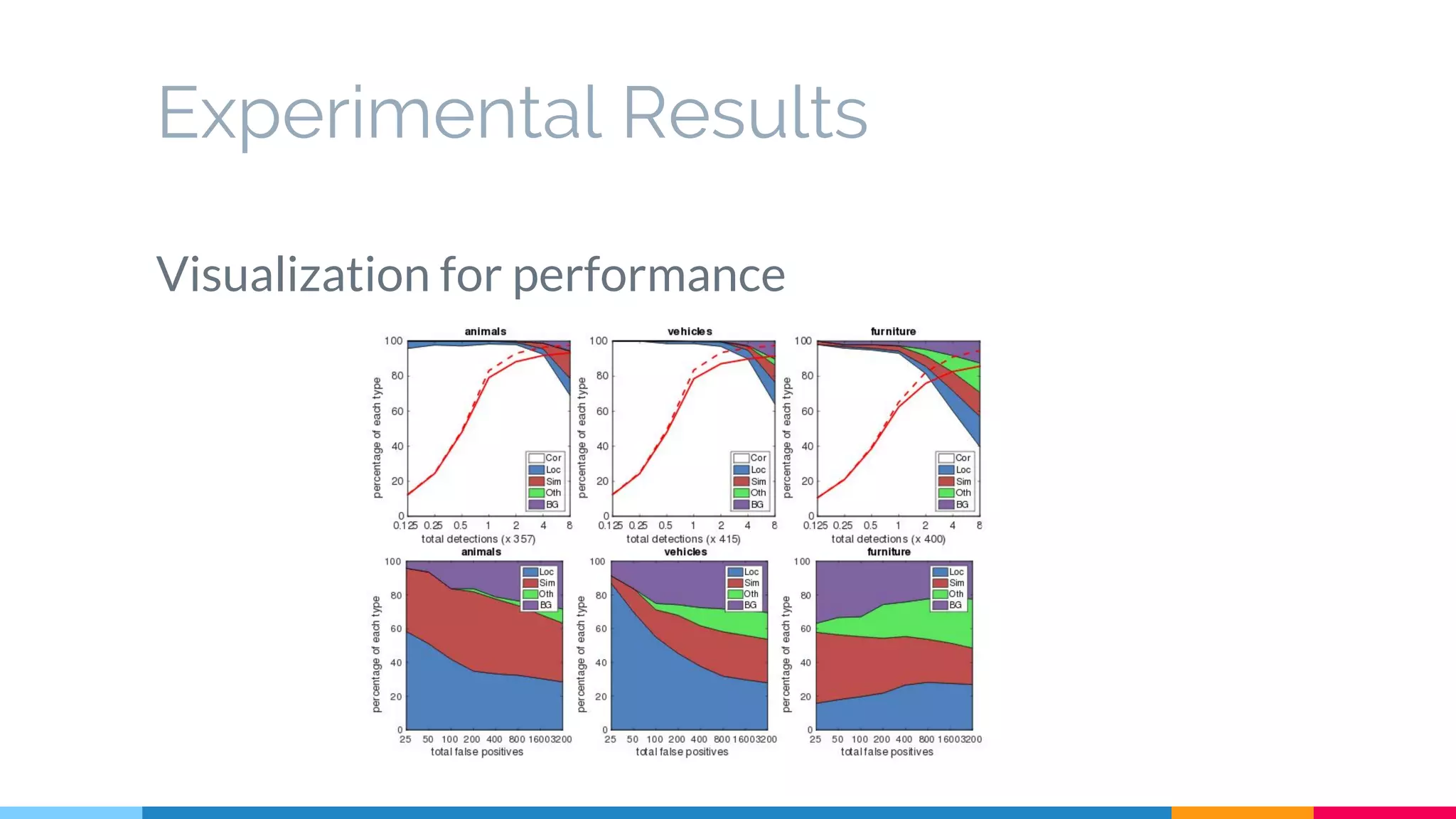
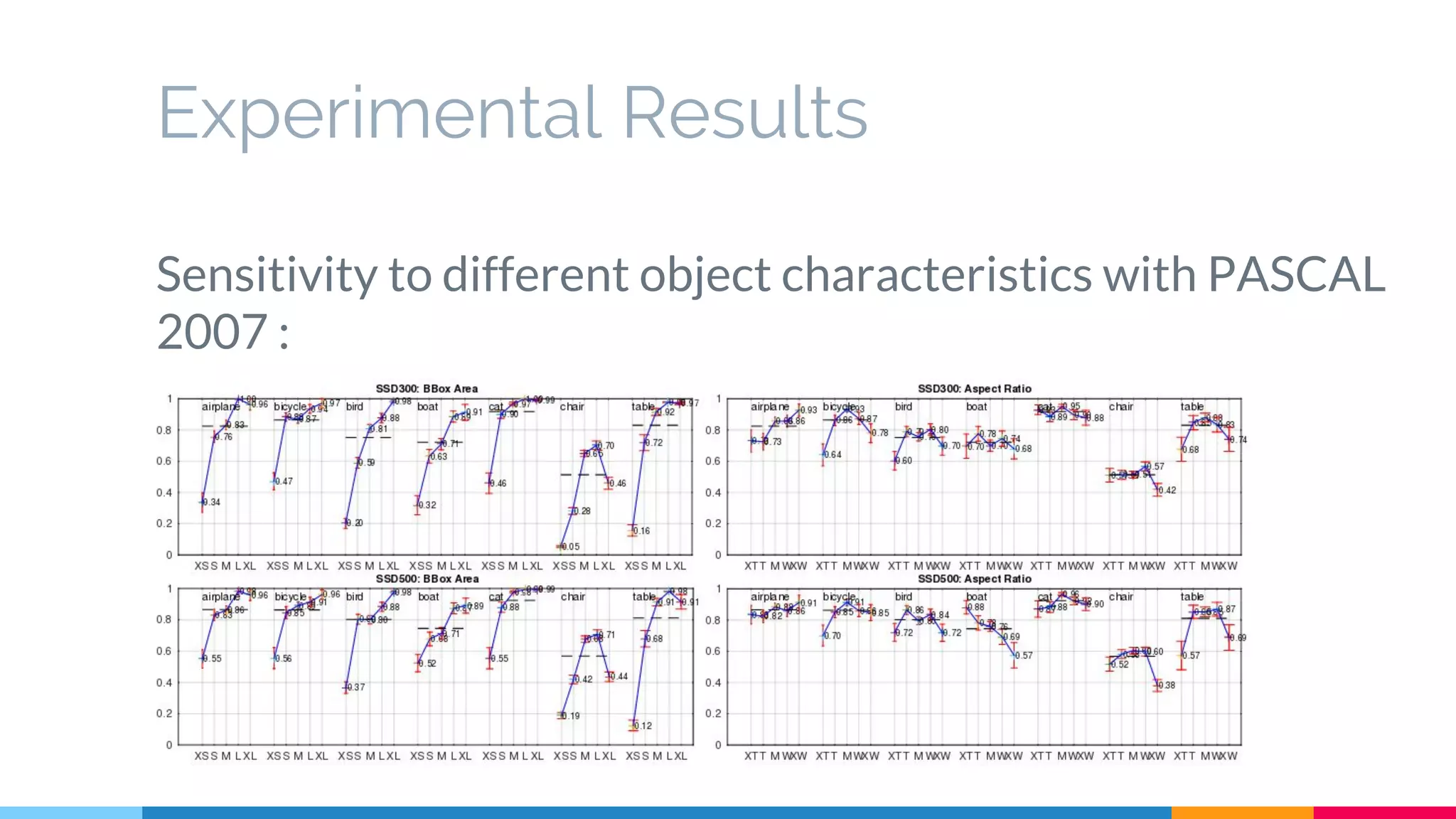
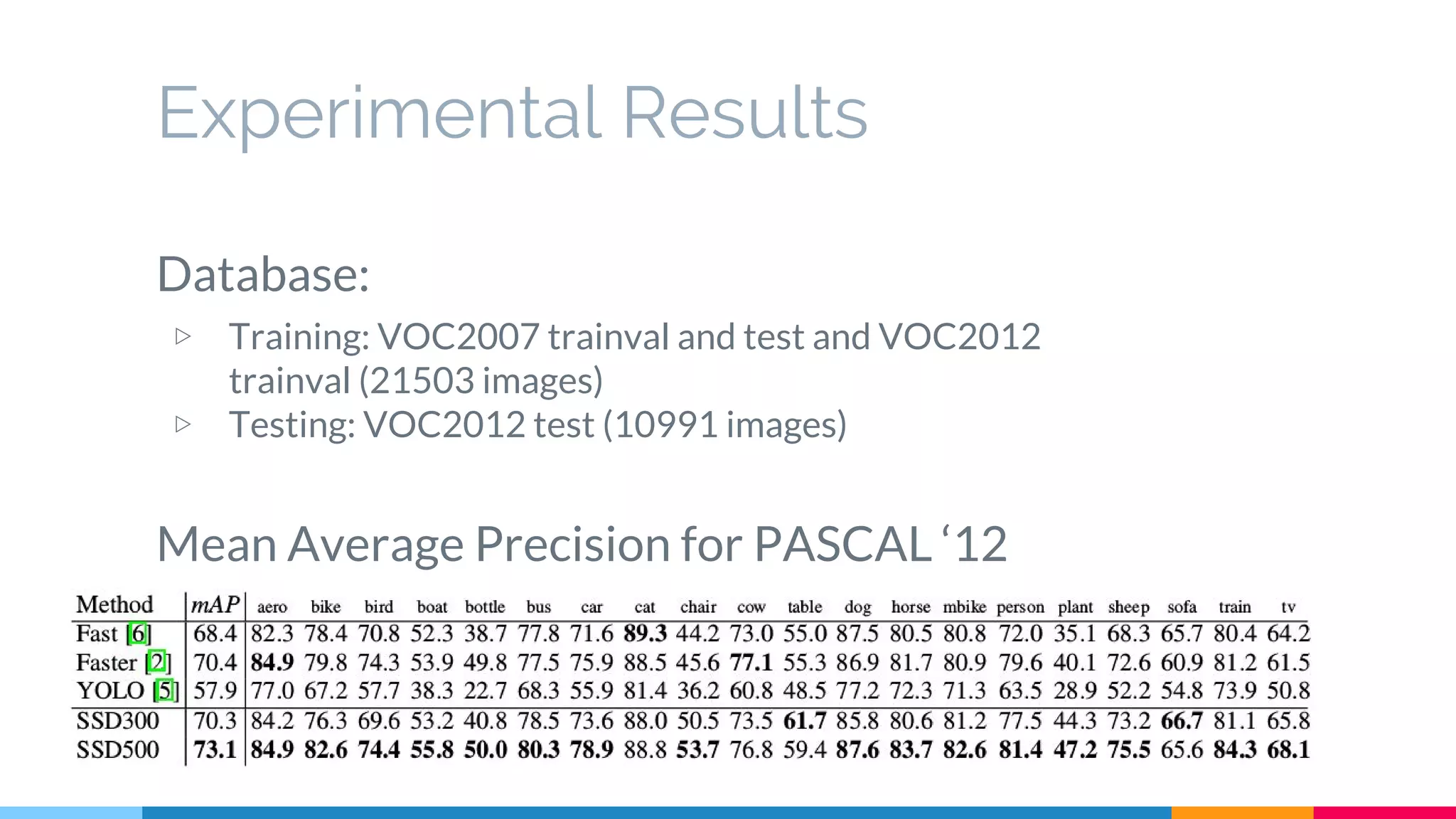
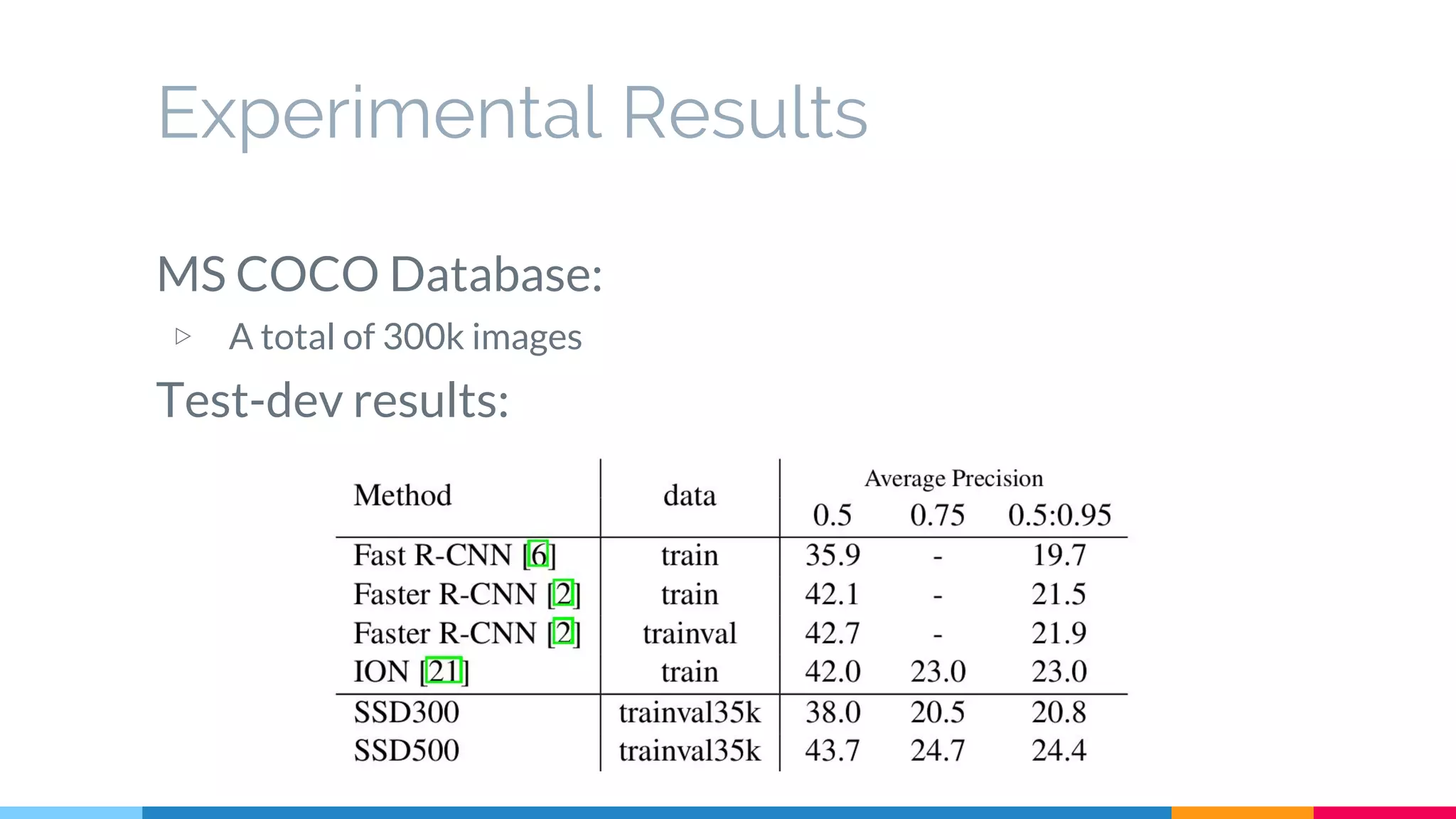
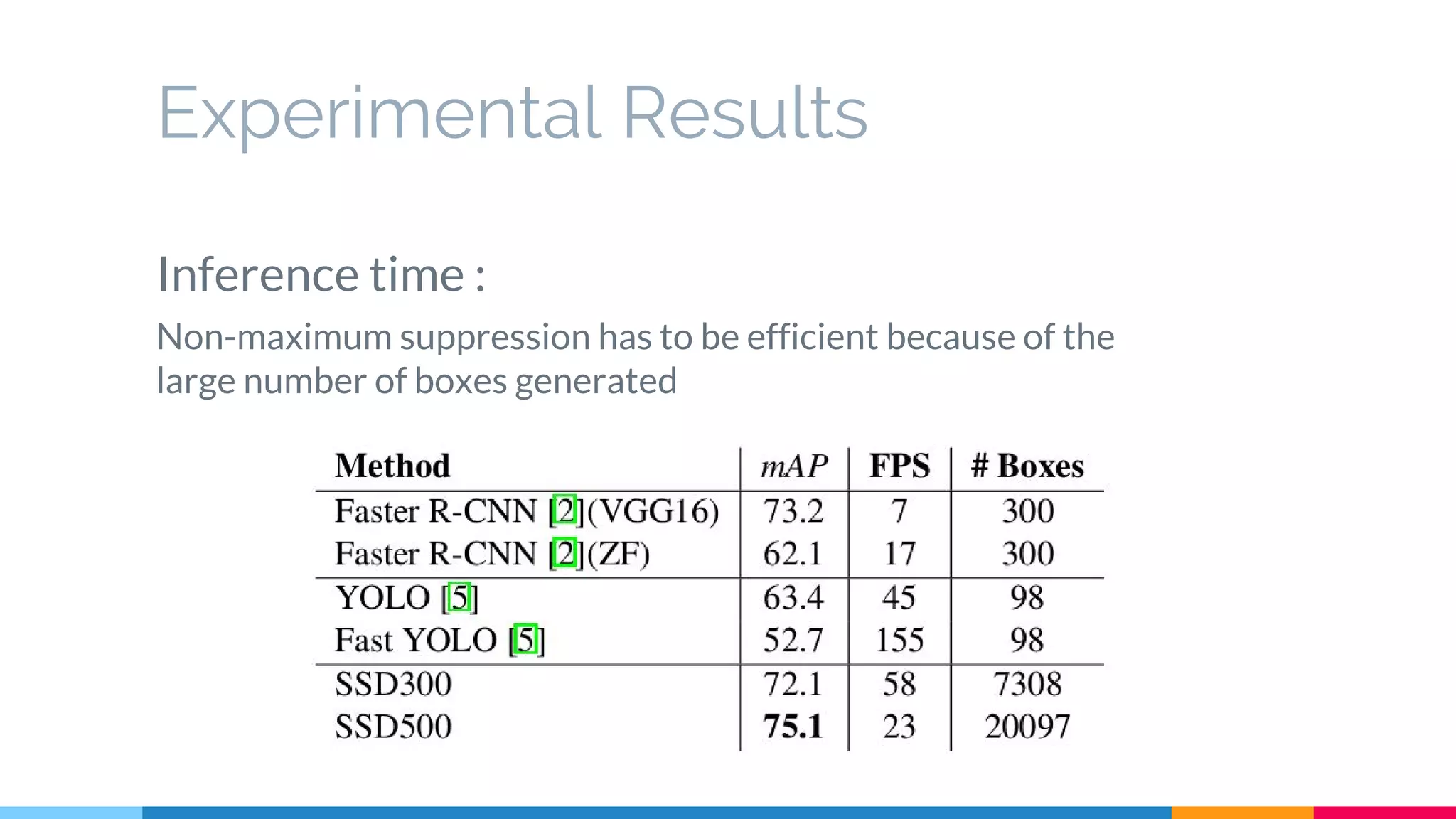
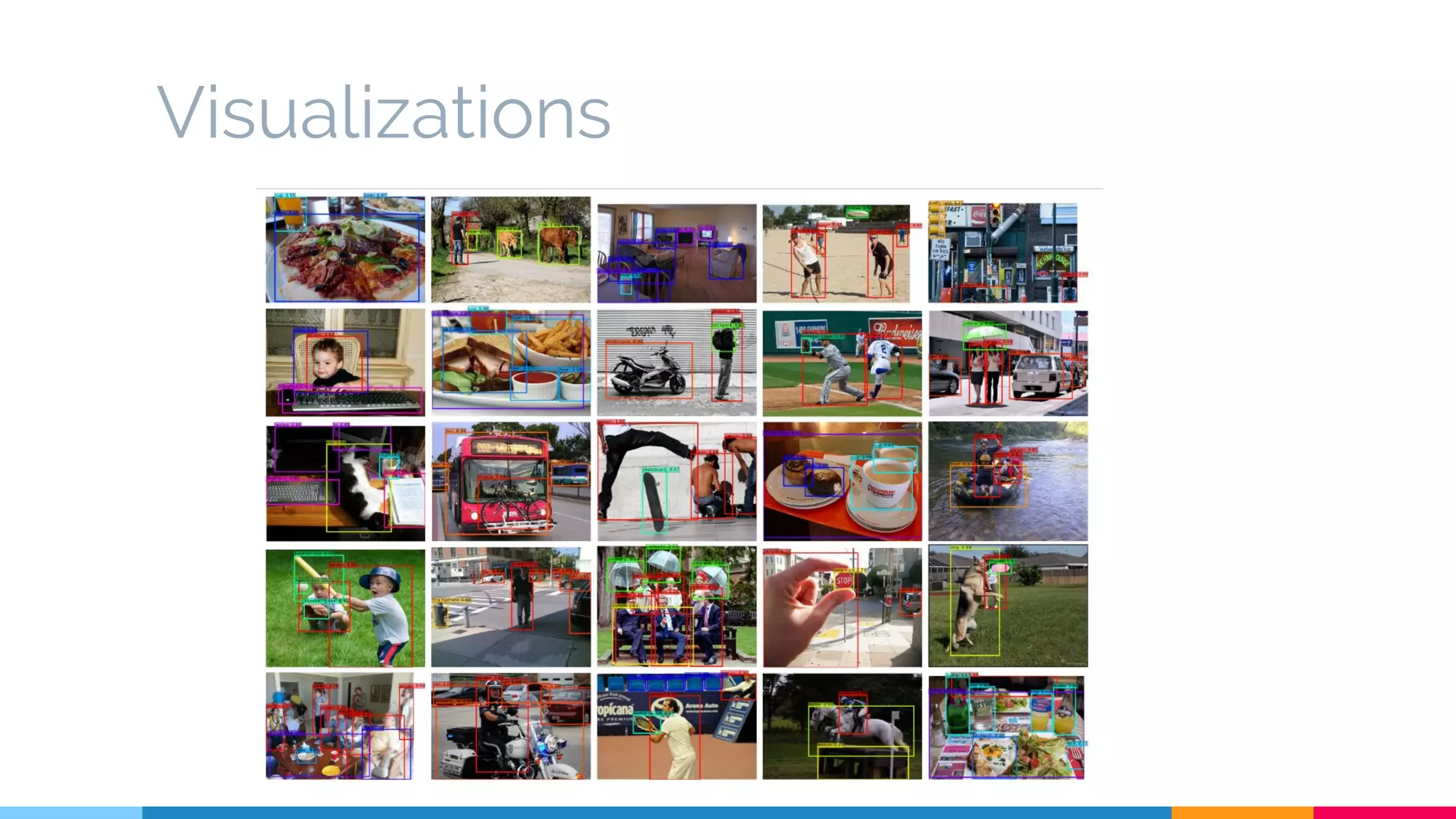
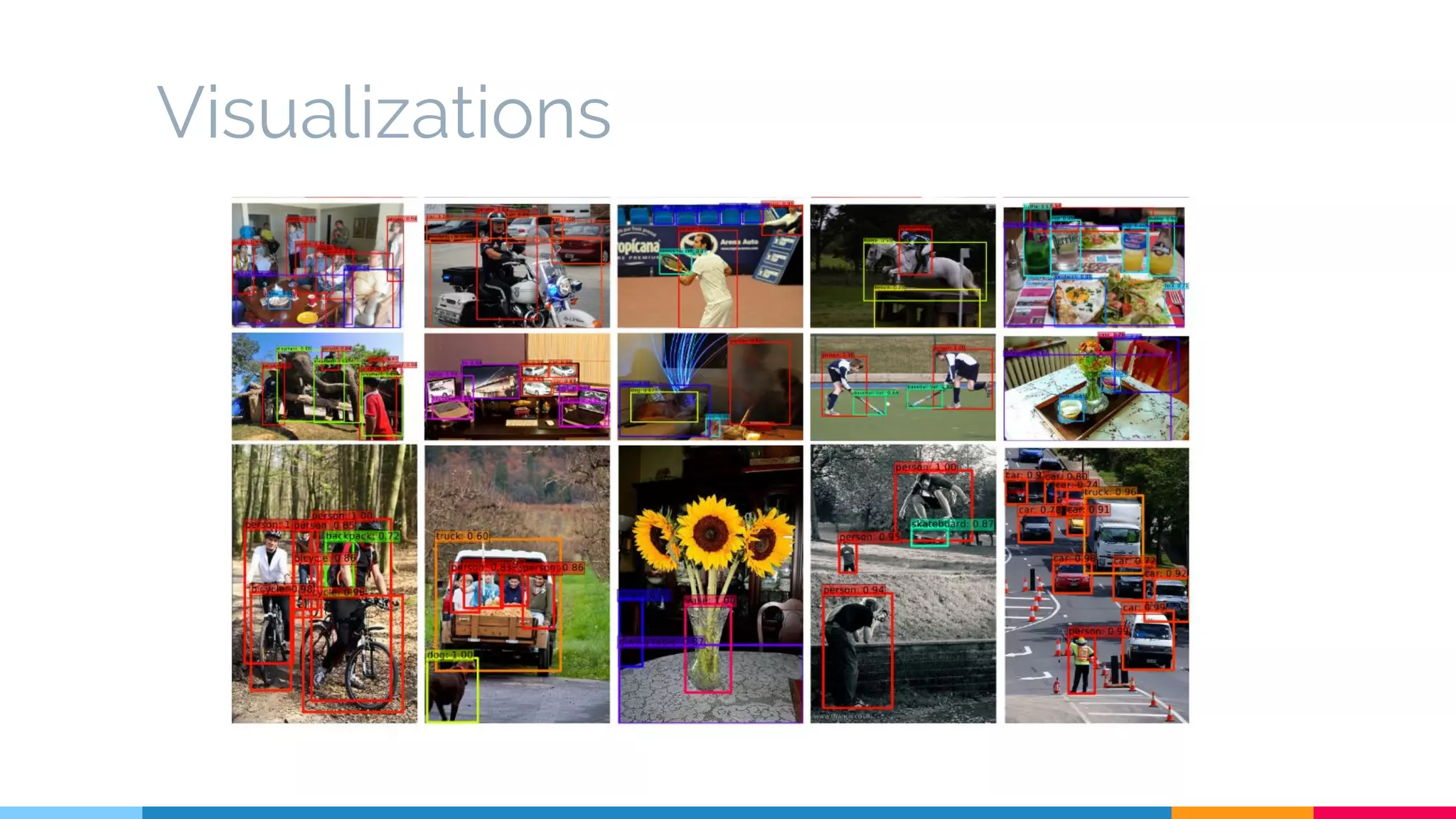
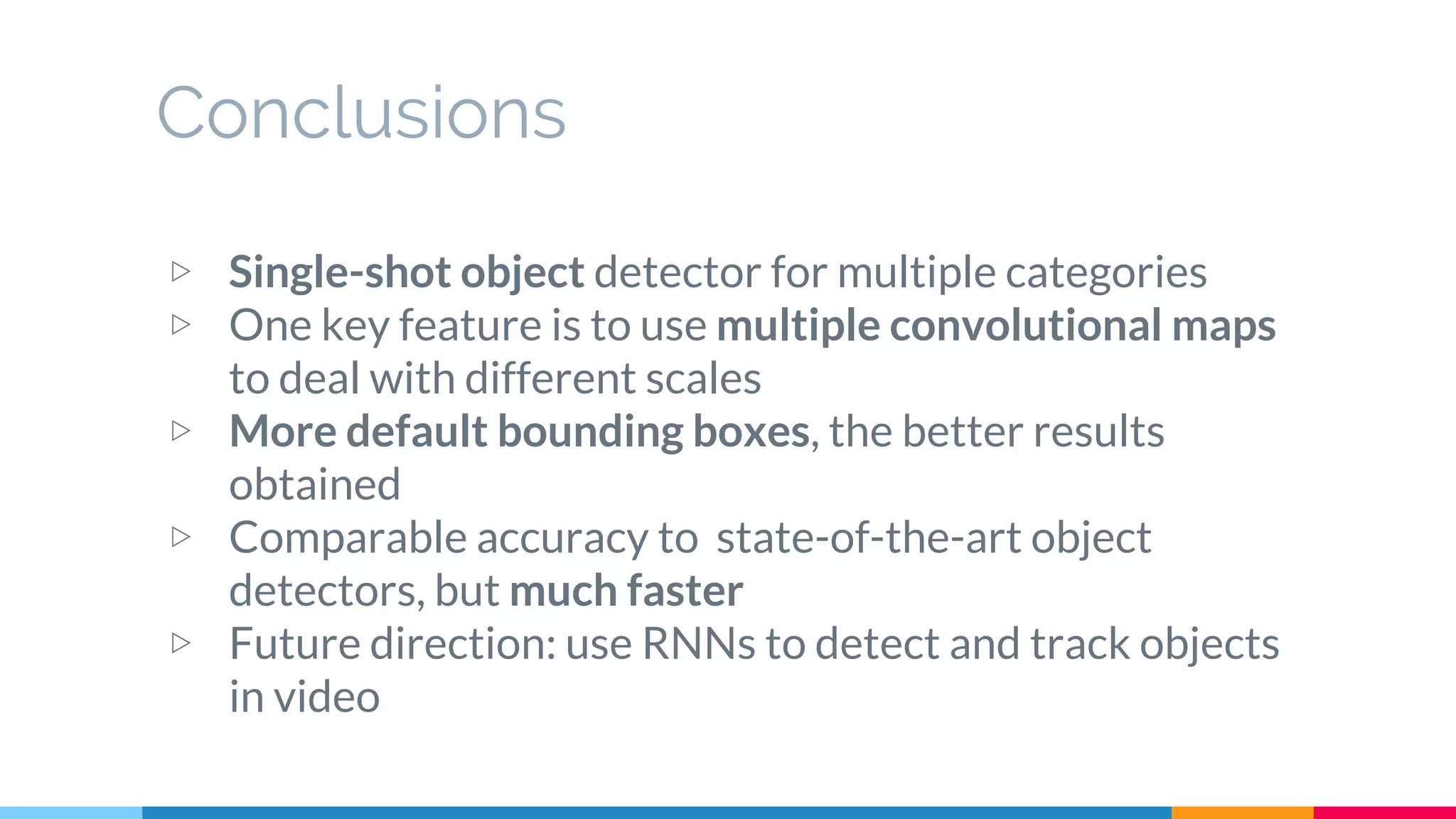

The SSD (Single Shot Multibox Detector) is a novel deep learning-based object detection framework that predicts object boxes and category scores in a single forward pass of the network, significantly improving speed while maintaining accuracy compared to previous methods like Faster R-CNN and YOLO. It utilizes small convolutional filters applied to different scaled feature maps to enhance detection of various object sizes and aspect ratios. The experimental results affirm SSD's efficiency and precision, marking it as a strong contender in real-time object detection applications.



















![[PR12] You Only Look Once (YOLO): Unified Real-Time Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/yolo-170616085751-thumbnail.jpg?width=640&height=640&fit=bounds)






















































![[DSC Europe 25] Jovan Bogicevic - Legacy to AI-Driven Defense: Transforming D...](https://cdn.slidesharecdn.com/ss_thumbnails/rsarluadt563hntyfc8q-3-251211083849-3e7bc4c0-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Miodrag Pesovic & Vladislav Radonjic - Federated Data Archite...](https://cdn.slidesharecdn.com/ss_thumbnails/gsbe3y5it5uhndi4e08e-1-251212103249-f1008e0c-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Behzad Hosseini - AI Agents in the Wild: Deploying Models tha...](https://cdn.slidesharecdn.com/ss_thumbnails/3qtejajvsjqrzwfept2c-10-251212103250-7f2b1068-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Dusan Nesic - Securing Tomorrow’s Infrastructure: Why Cyber-P...](https://cdn.slidesharecdn.com/ss_thumbnails/qikbszfftyowjm2q6duw-1-251211083848-8f2ead6b-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Debmalya Biswas - Agentification: the art of transforming man...](https://cdn.slidesharecdn.com/ss_thumbnails/r5azlggvtqiaiiusrqdr-4-251212103249-5a12c89b-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DSC Europe 25] Branko Dzakula - From Defense to Attack: How AI Redefines Cyb...](https://cdn.slidesharecdn.com/ss_thumbnails/80bdzdxpr3ky2g0qvyk9-8-251211083048-ce5fc1ee-thumbnail.jpg?width=640&height=640&fit=bounds)