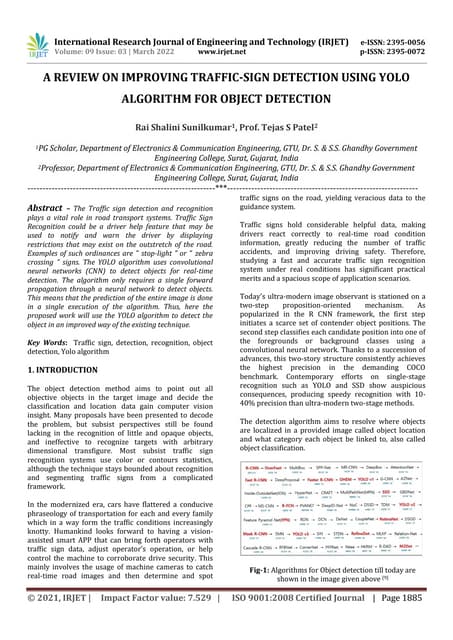
The document provides an overview of an object detection algorithm aimed at accurately identifying and classifying objects in video frames, which is critical for applications like autonomous driving. It discusses the motivation behind creating high-performance detection models, the limitations faced such as occlusion and illumination issues, and evaluates various deep learning approaches including one-stage (YOLO, SSD) and two-stage (R-CNN, Fast R-CNN, Faster R-CNN) methods. The proposed model demonstrates effective results using the COCO dataset, achieving high confidence in object detection while still needing improvements in accuracy.

![International Journal of Trend in Scientific Research and Development (IJTSRD) @ www.ijtsrd.com eISSN: 2456-6470
@ IJTSRD | Unique Paper ID - IJTSRD23422 | Volume – 3 | Issue – 3 | Mar-Apr 2019 Page: 1665
8. RESULTS AND ANALYSIS
The model is able to predict the objects in the image
correctly (with near perfectconfidenceincaseofthedogand
perfect confidence in case of the Frisbee). The model was
trained on the Microsoft’s COCO (Common Objects in
COntext) dataset which consists of 80 classes (common
everyday house-hold items).
The model accurately predicts almost all the people in the
scene with the confidence scores of the objects that it
detects, i.e., the probability of the object belonging to the
class according to the model. The model shows above 80%
confidence scores for people in the front and shows above
70% confidence score for people that are in behind and not
shown properly. This shows that despite suffering from
occlusion, the model predicts that a person is present in the
scene with greater than 70% confidence. Not only does the
model detect objects accurately when large groups of small
objects are present, the model also confidently detects
objects suffering from occlusion.
9. CONCLUSION
After analyzing the results, we can conclude that the model
offers high performance and accuracy in the real-world and
also overcomes most of the limitations mentioned earlier.
The model offers satisfactory results to most, if not all of our
expectations as mentioned in the EXPECTED RESULTS
section.
Despite this, our model still needs to improve its accuracy in
detecting objects
REFERENCE
[1] http://people.csail.mit.edu/klbouman/pw/pa
pers_and_presentations/ObjectRecognitionDetection-
11-25-12.pdf
[2] http://ethesis.nitrkl.ac.in/4836/1/211CS104 9.pdf
[3] https://github.com/OlafenwaMoses/ImageAI/tree/ma
ster/imageai/Detection
[4] http://cocodataset.org/
[5] https://www.google.com/search?q=Retinan
et&oq=Retinanet&aqs=chrome..69i57.109
0j0j1&sourceid=chrome&ie=UTF-8
[6] https://www.analyticsvidhya.com/blog/201 8/10/a-
step-by-step-introduction-to-the-basic-object-
detection-algorithms-part-1/
[7] https://www.tensorflow.org/lite/models/obj
ect_detection/overview
[8] https://www.hackerearth.com/blog/machin e-
learning/introduction-to-object-detection/
[9] https://www.edureka.co/blog/tensorflow-object-
detection-tutorial/](https://image.slidesharecdn.com/355objectdetection-190620124953/75/Object-Detection-An-Overview-3-2048.jpg)



![[IJET-V1I6P15] Authors : Sadhana Raut, Poonam Rohani,Sumera Shaikh, Tehesin S...](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i6p15-160110010824-thumbnail.jpg?width=640&height=640&fit=bounds)