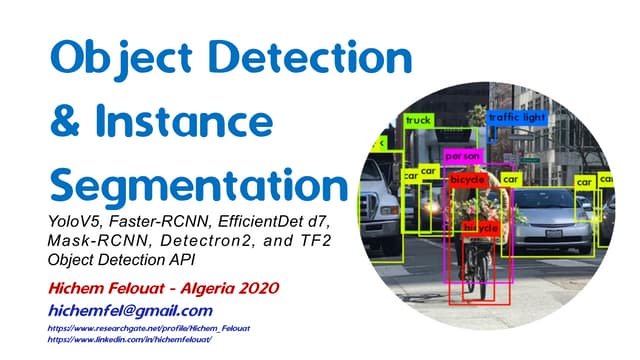
This document discusses the YOLO object detection algorithm and its applications in real-time object detection. YOLO frames object detection as a regression problem to predict bounding boxes and class probabilities in one pass. It can process images at 30 FPS. The document compares YOLO versions 1-3 and their improvements in small object detection, resolution, and generalization. It describes implementing YOLO with OpenCV and its use in self-driving cars due to its speed and contextual awareness.










![[PR12] You Only Look Once (YOLO): Unified Real-Time Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/yolo-170616085751-thumbnail.jpg?width=640&height=640&fit=bounds)