Downloaded 403 times











The document provides information about Controller Area Network (CAN) including its main features, applications, history, specifications, frames, error detection and handling, and devices. CAN is a serial communication protocol originally developed for motor vehicles. It supports real-time control with high error handling. CAN uses prioritized message-based communication and is widely used in automotive, industrial automation and other applications.
CAN is a serial communication protocol for real-time control in vehicles and automation. Applications include motor vehicles, industrial automation, and household devices.
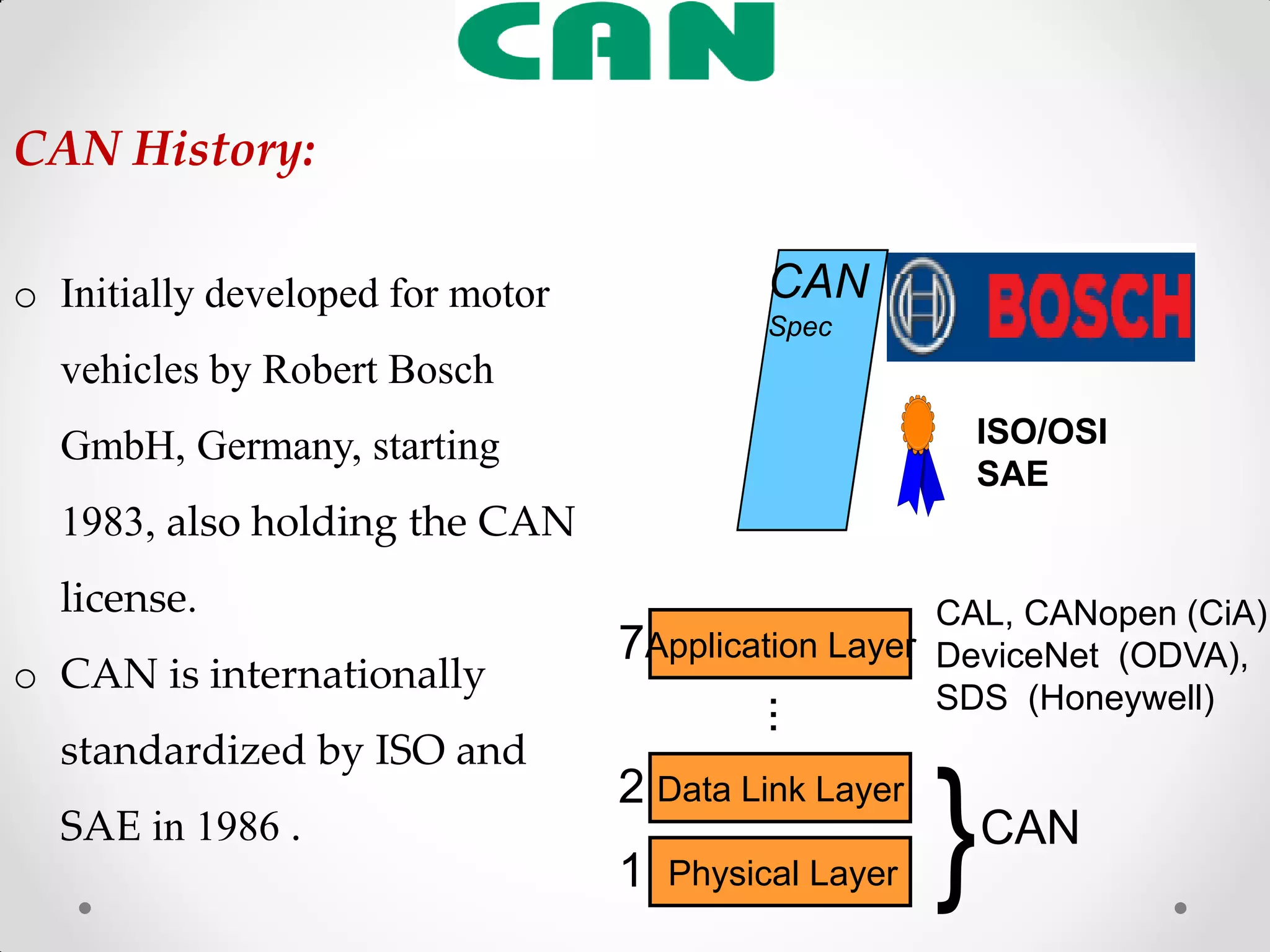
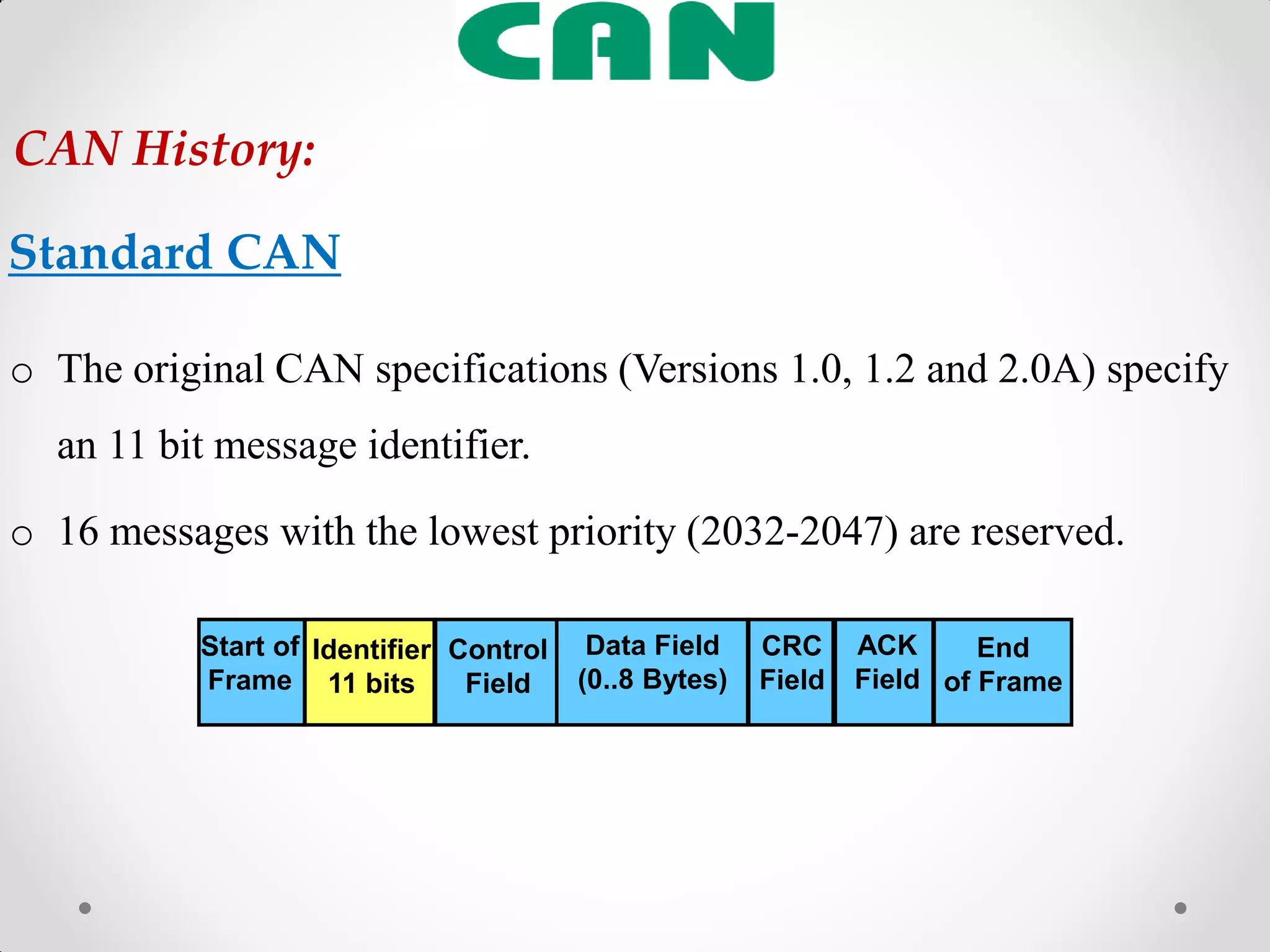
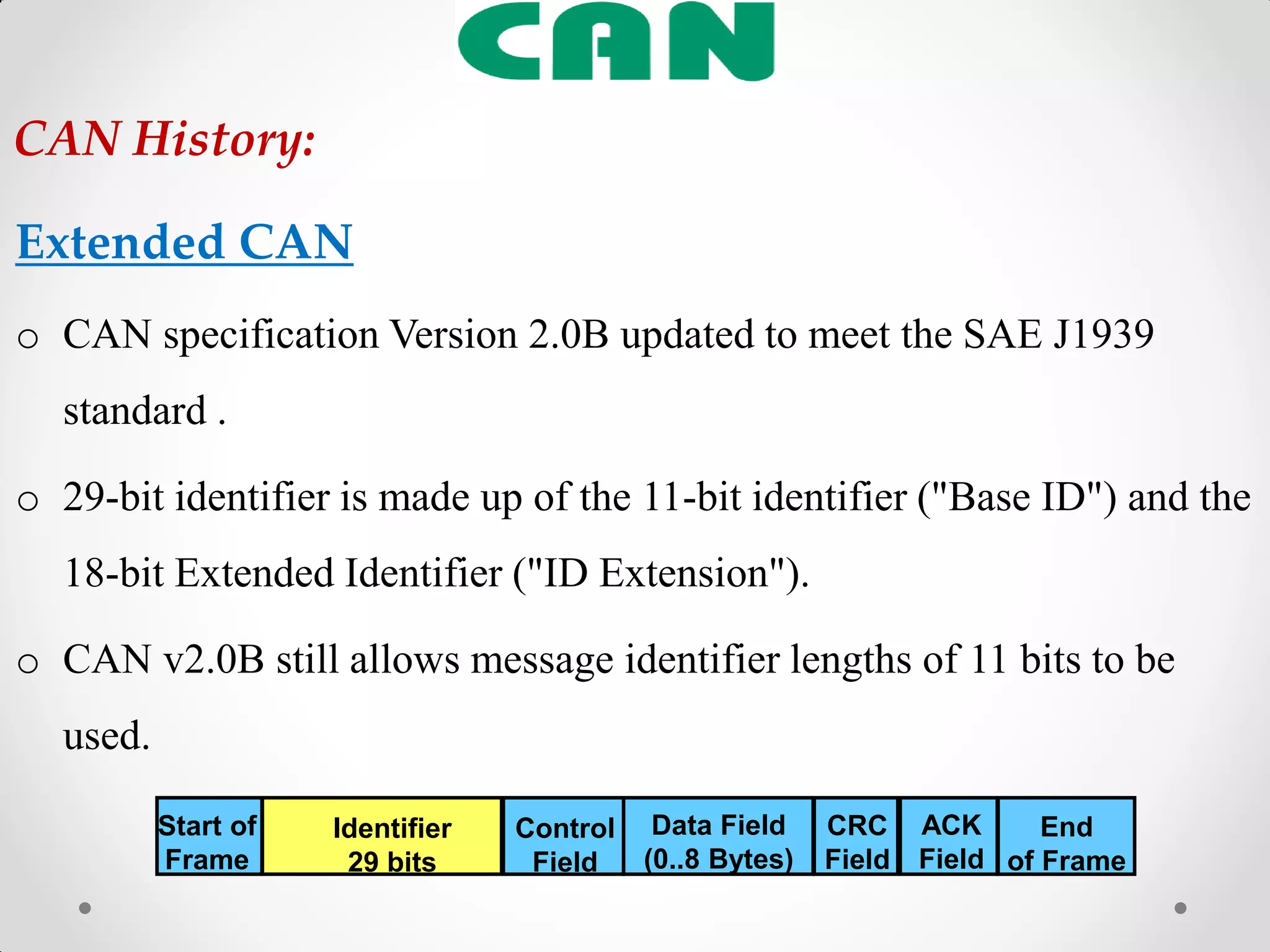
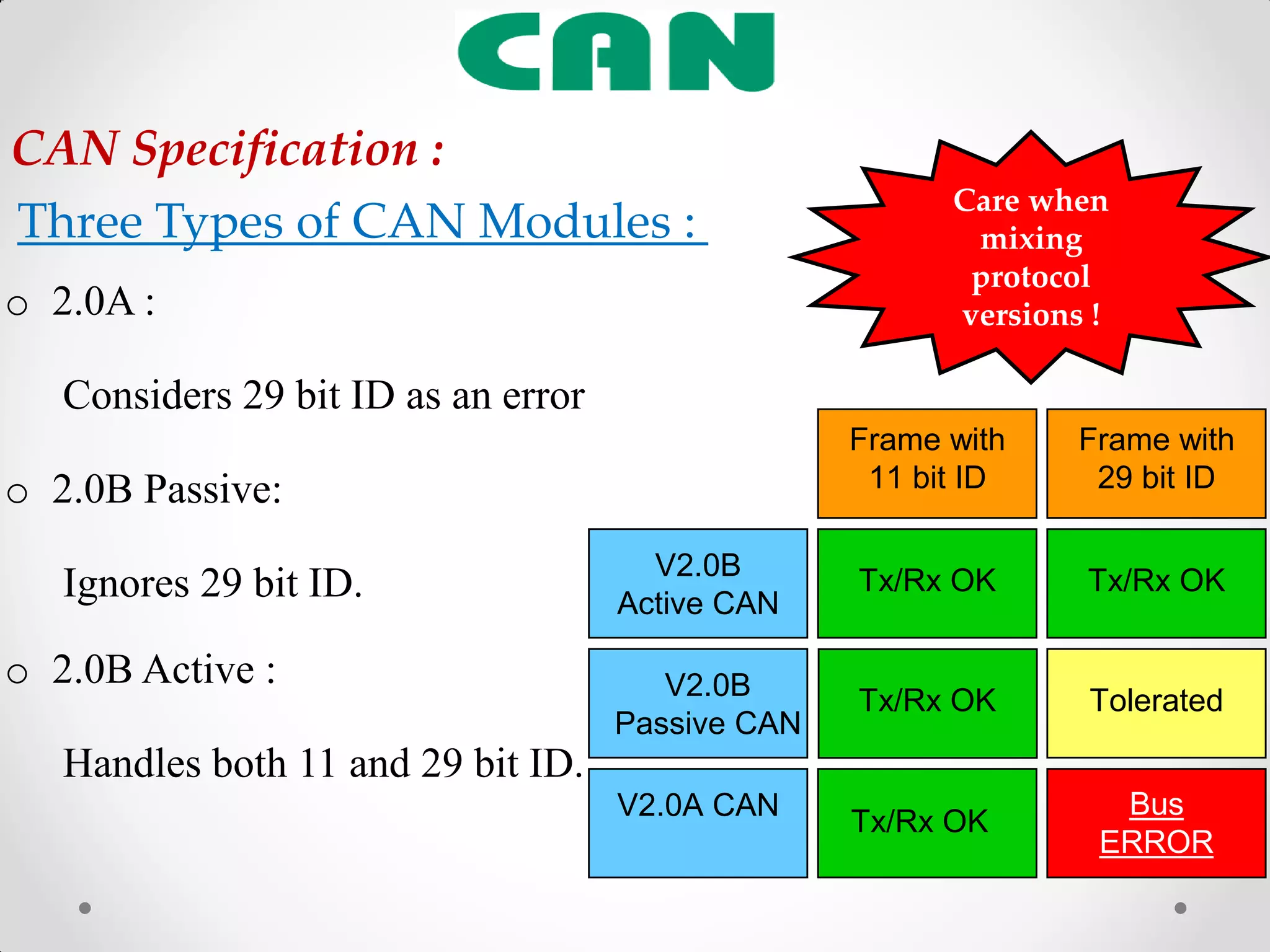
Initially developed by Bosch in 1983, standardized globally in 1986. Versions of CAN specifications include 11-bit and 29-bit identifier systems.
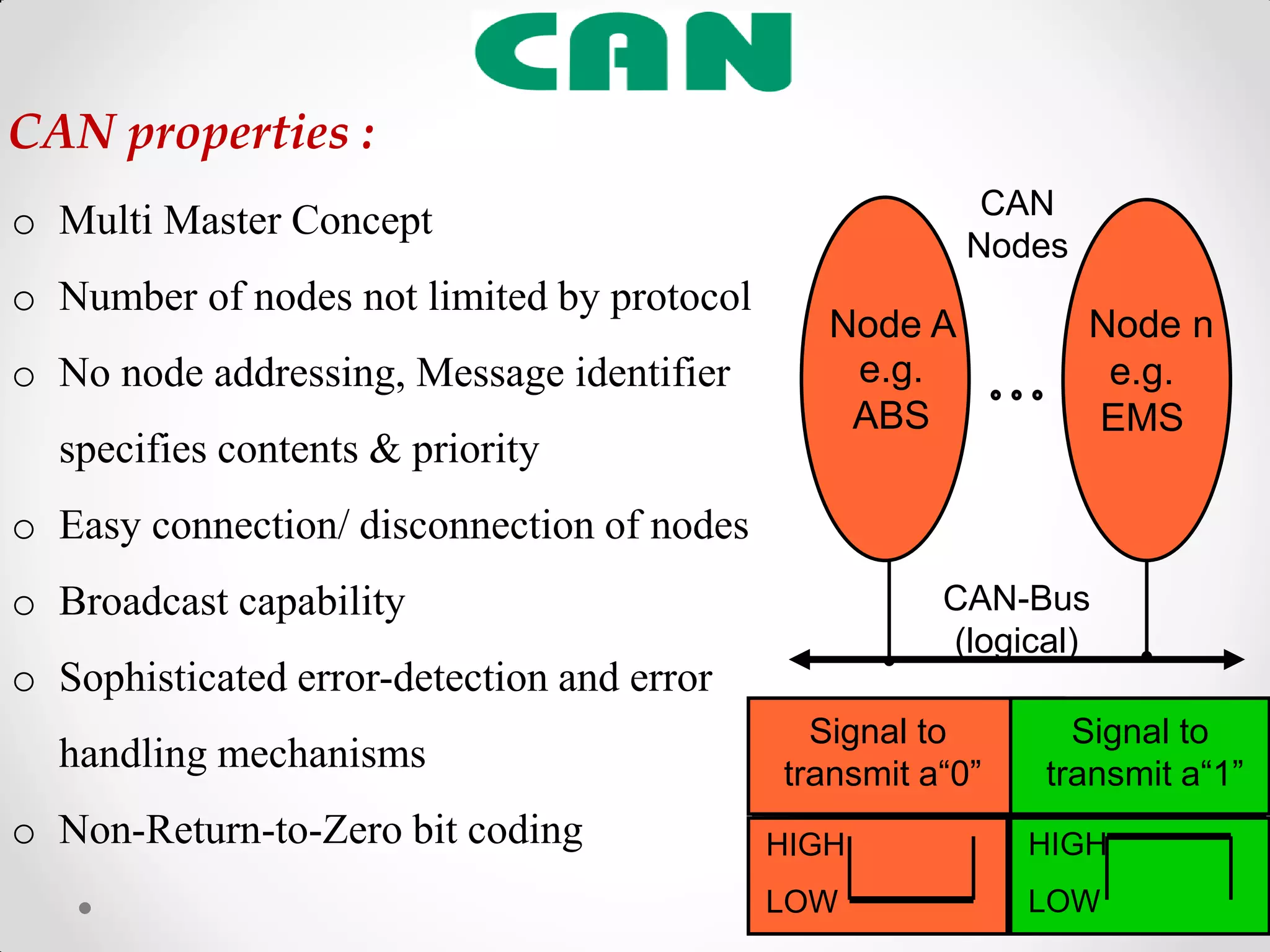
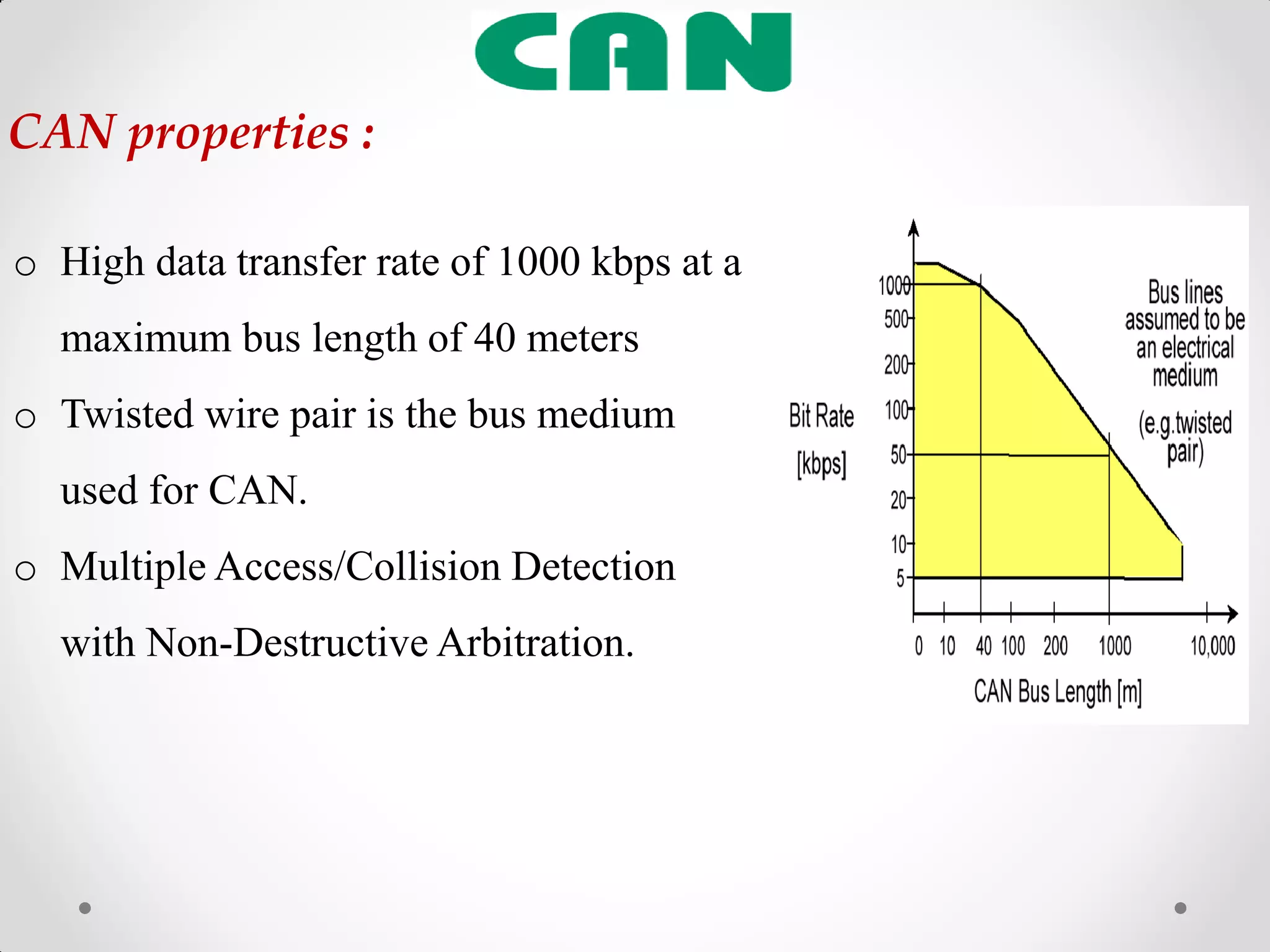
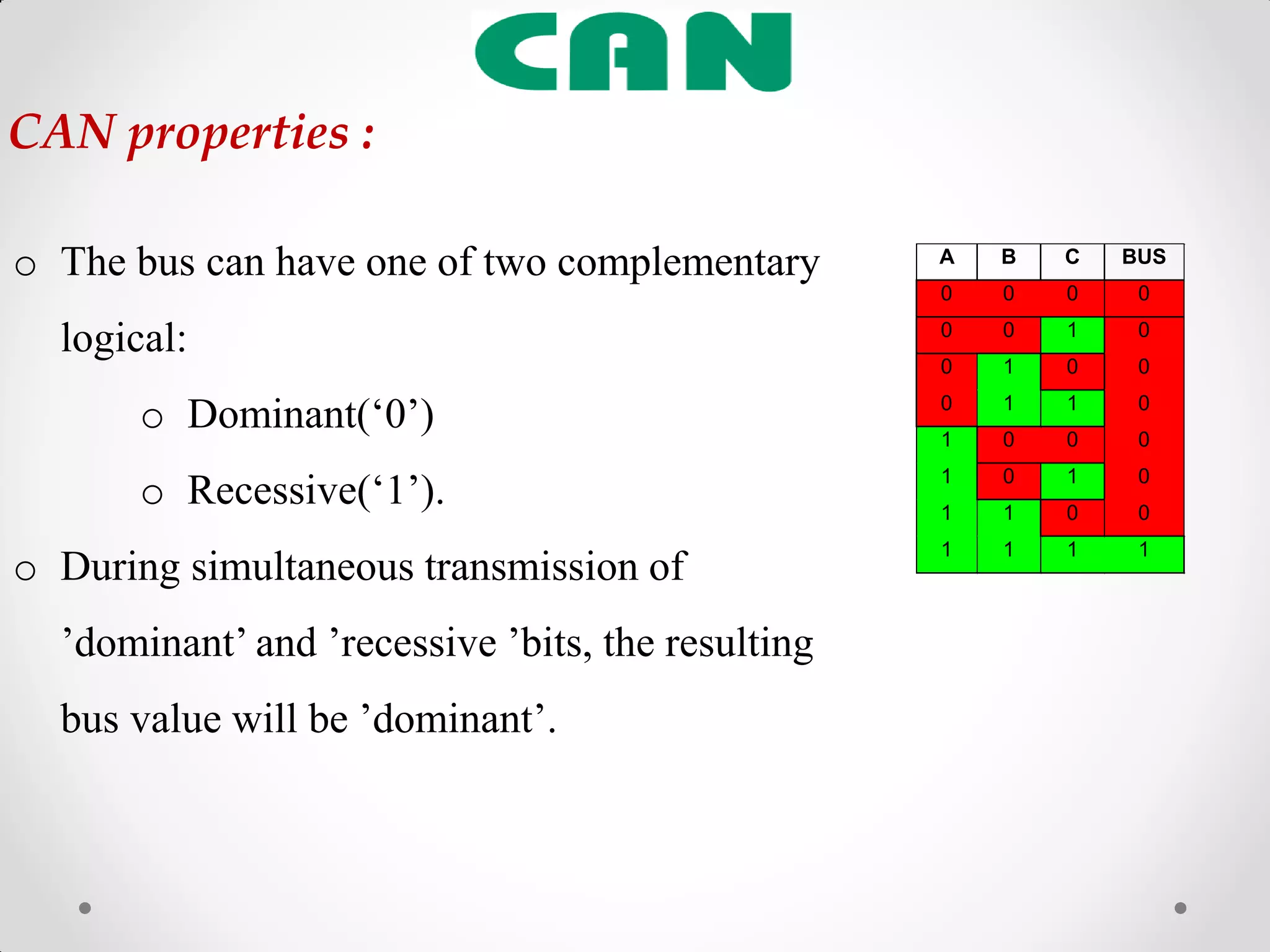
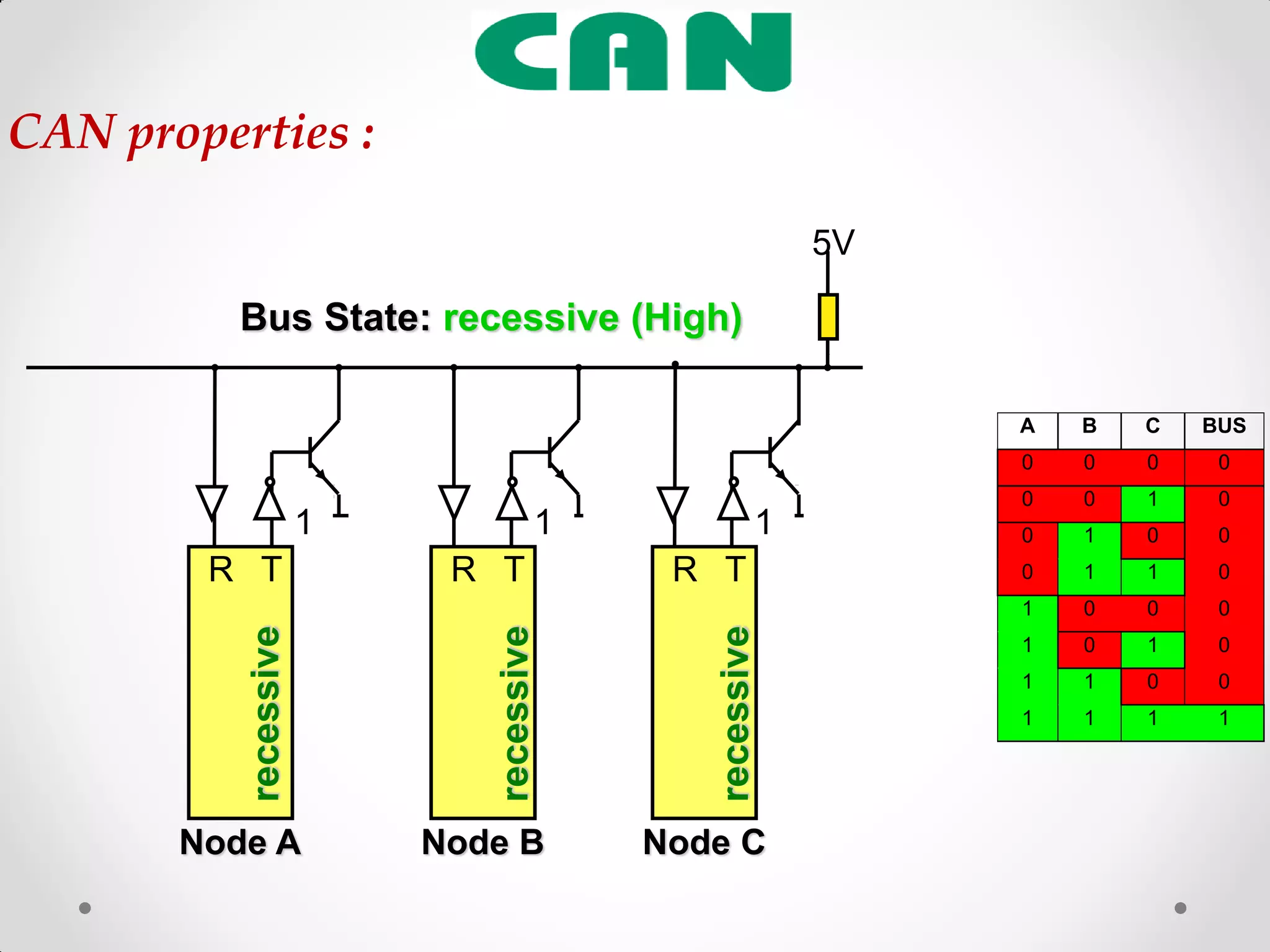
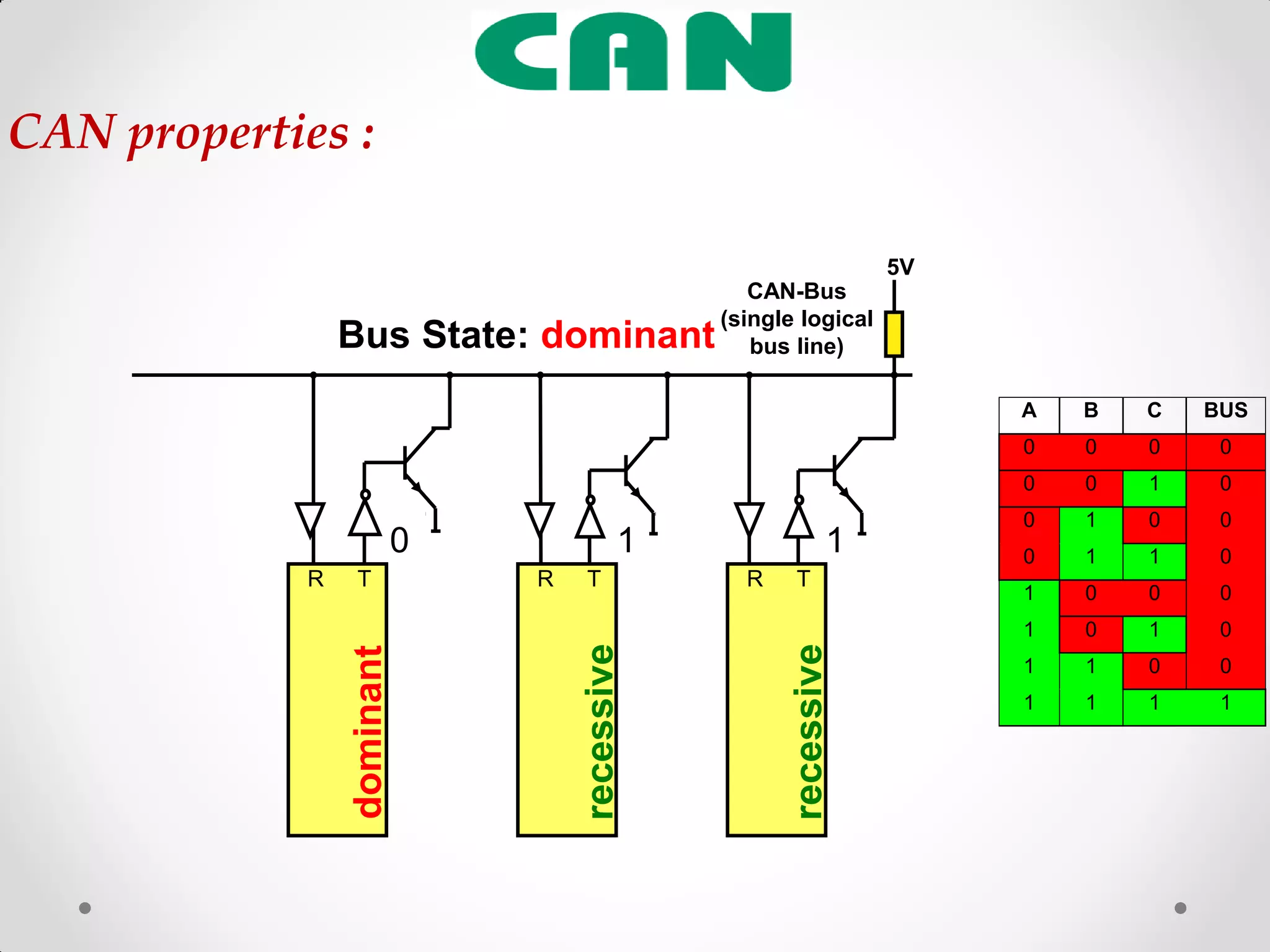
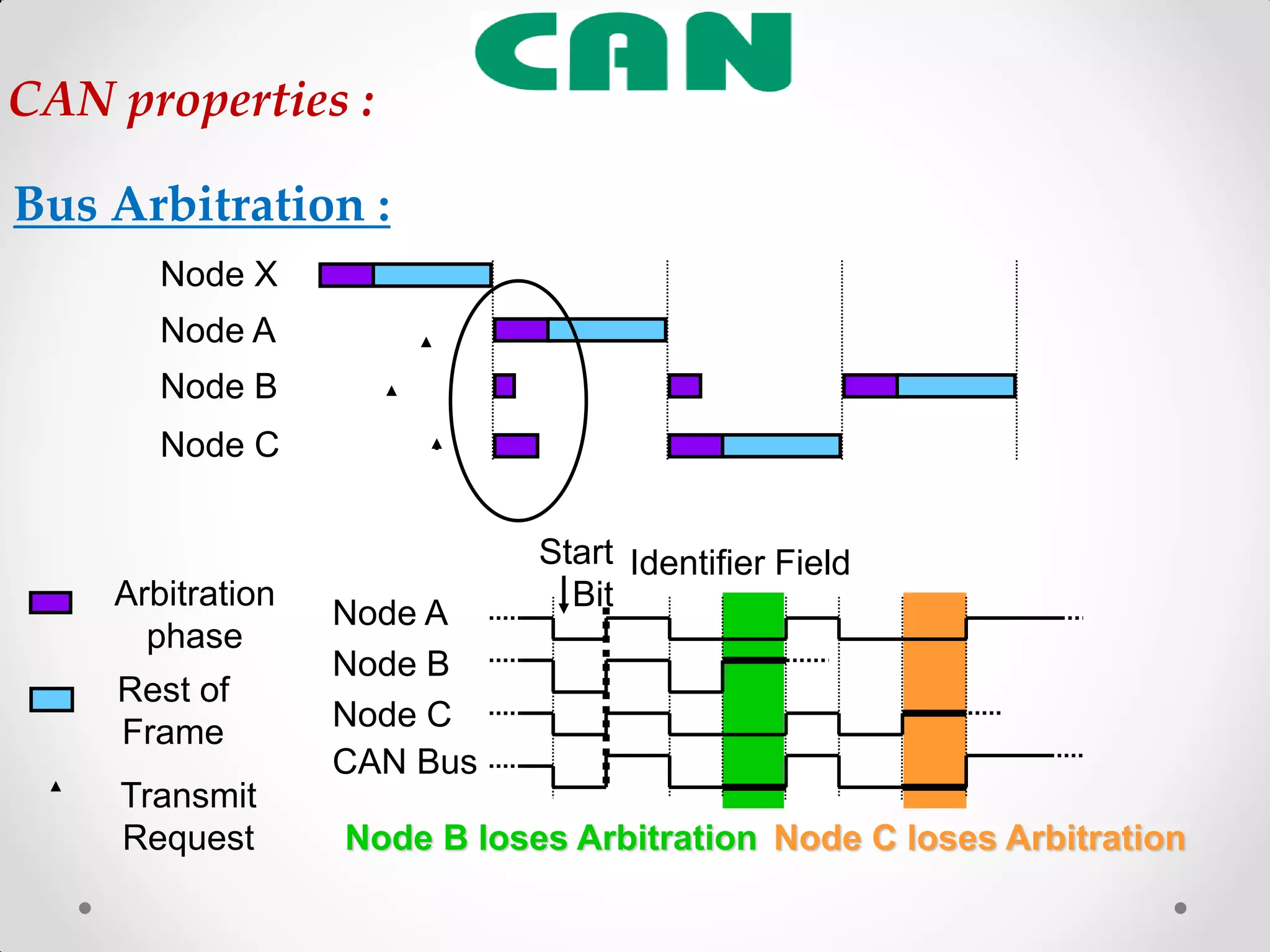
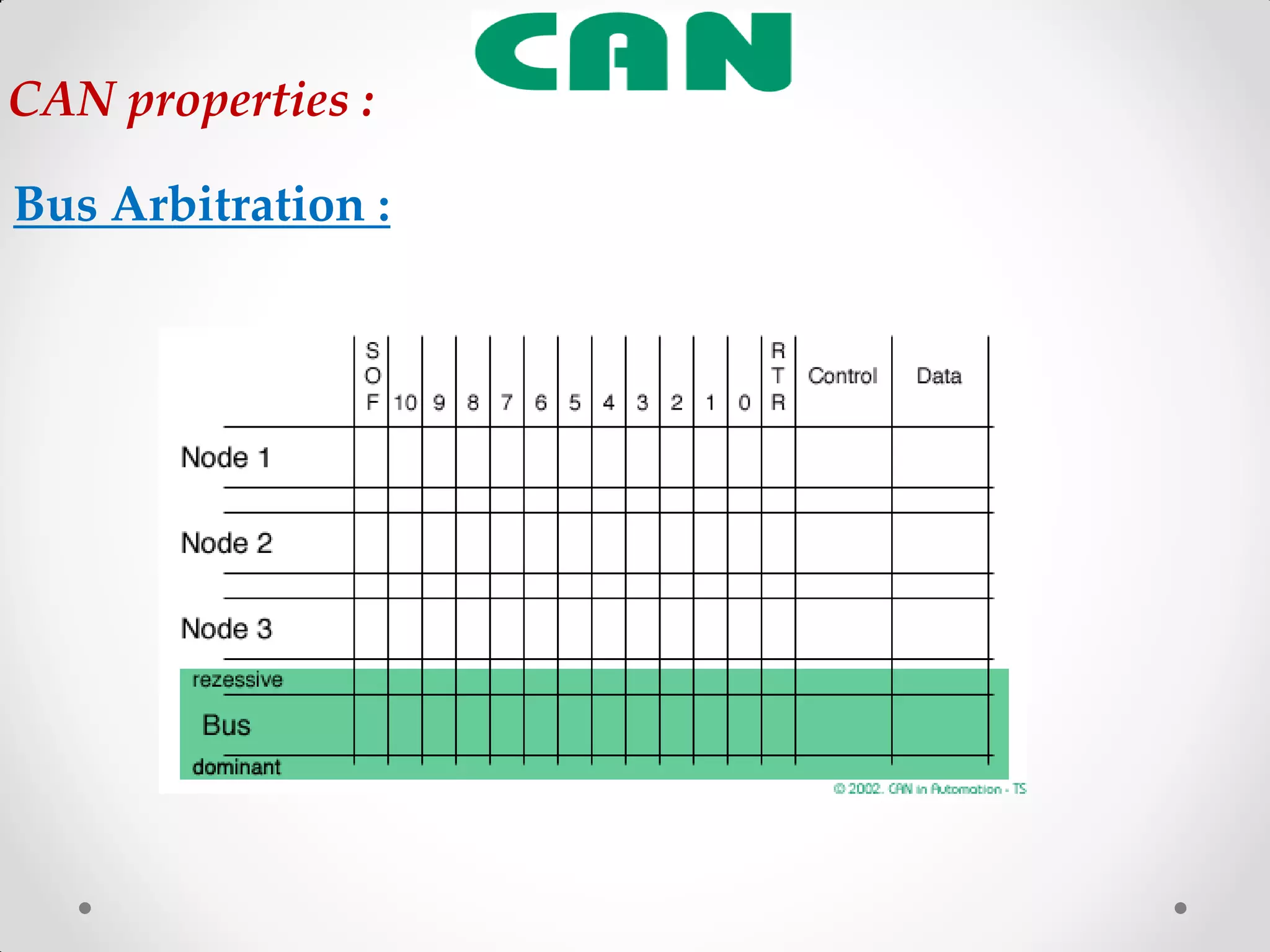
This section highlights CAN's multi-master capabilities, data transfer rates (up to 1000 kbps), error-detection mechanisms, and bus arbitration.
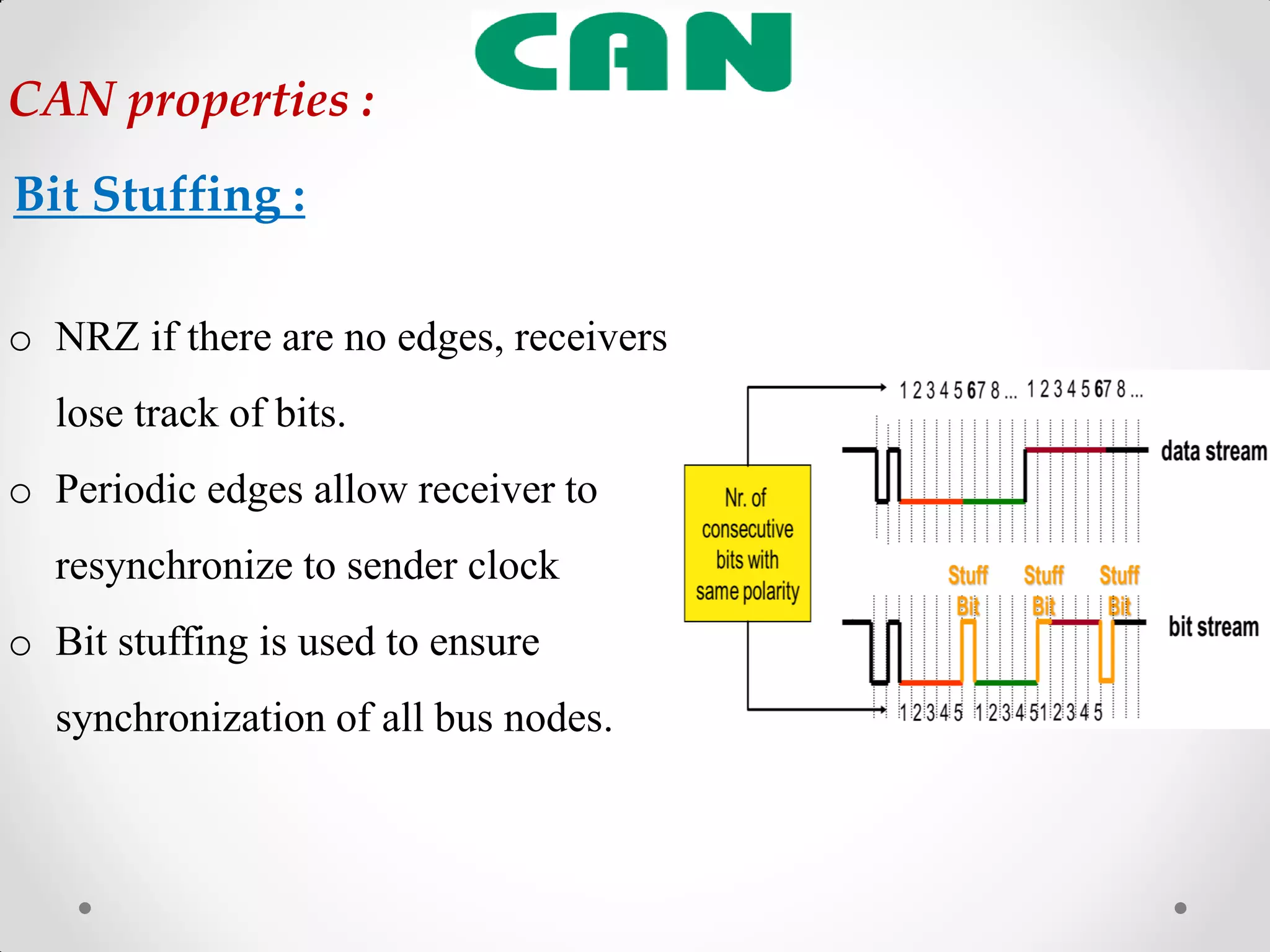
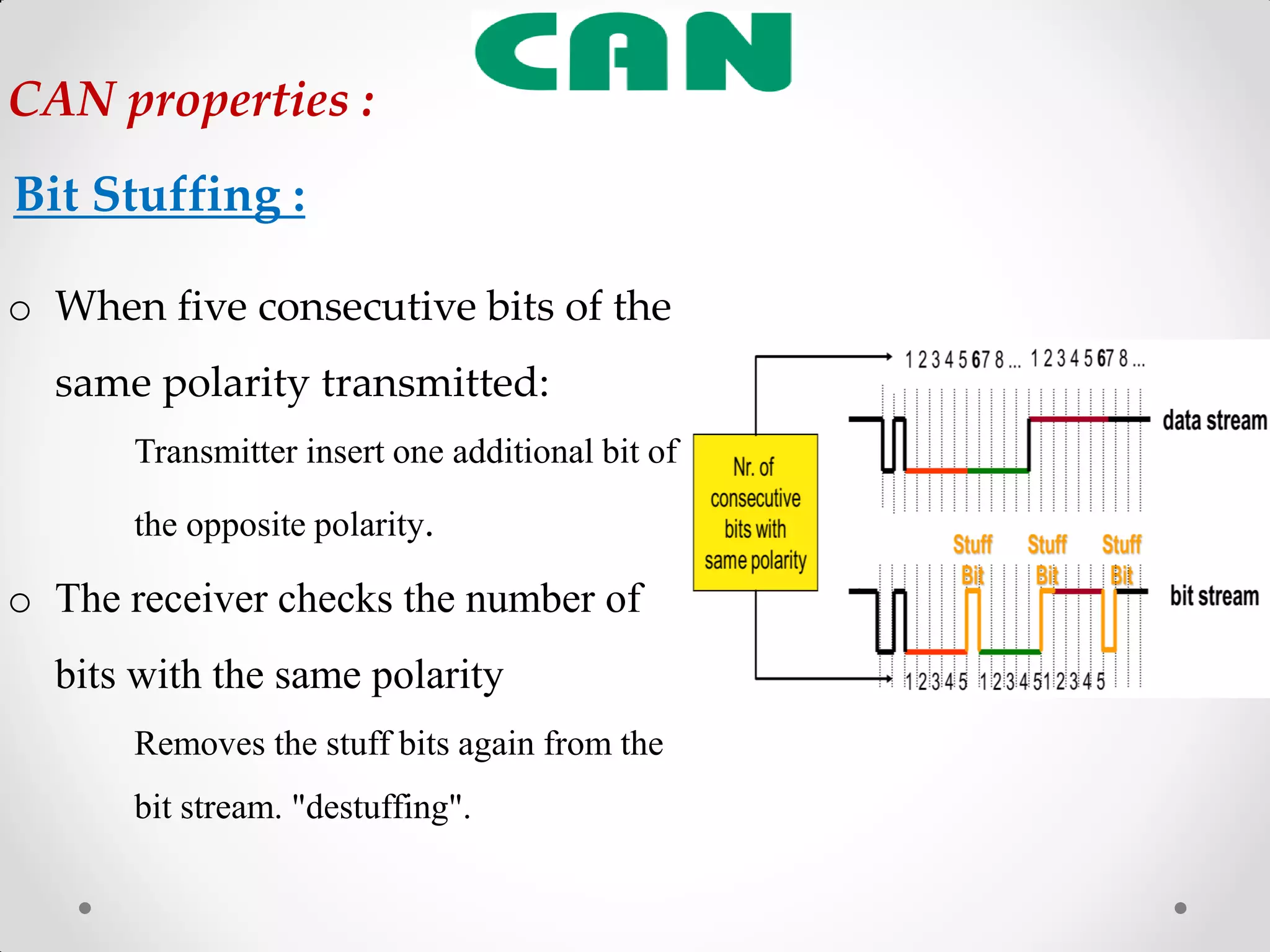
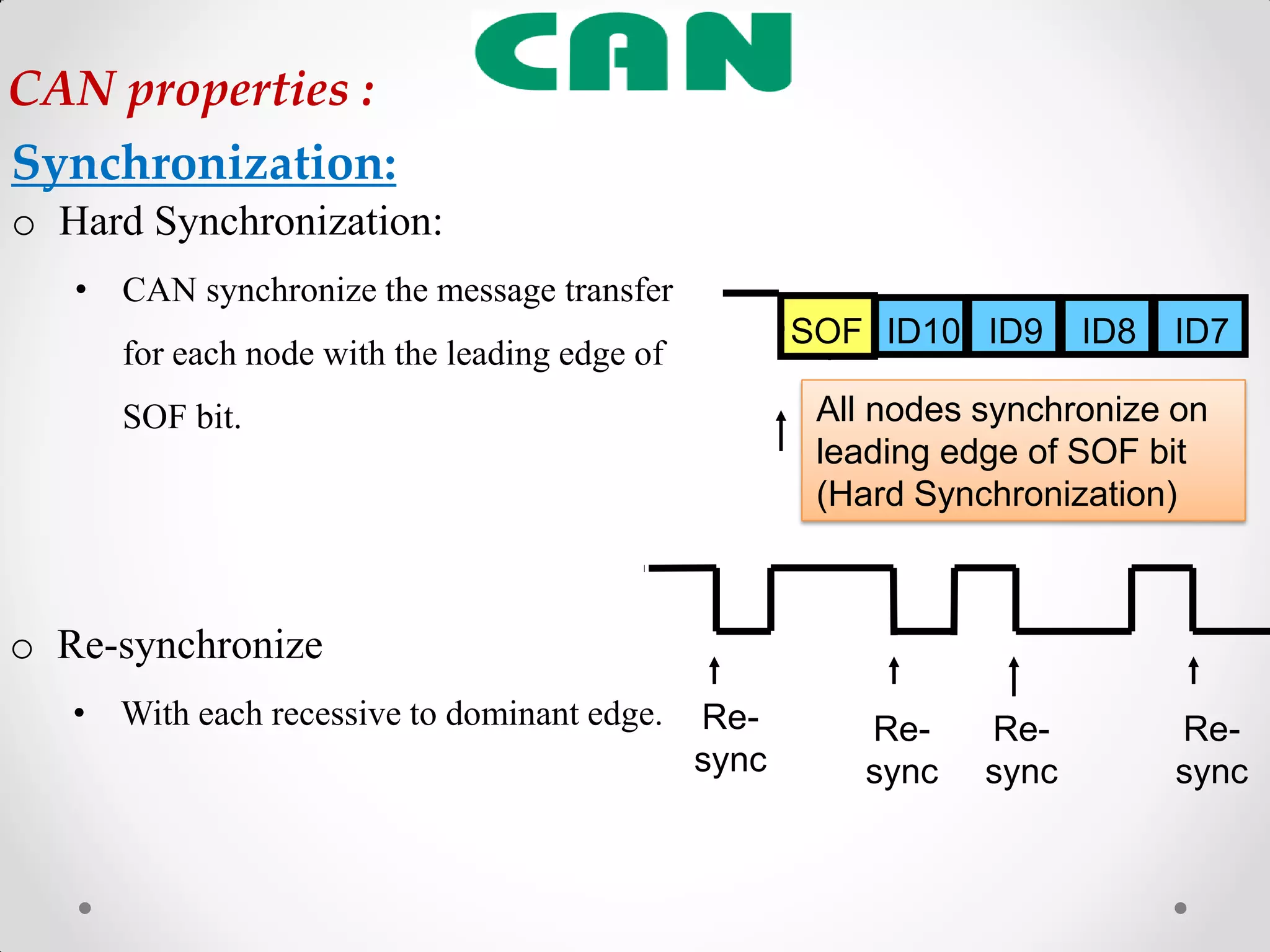
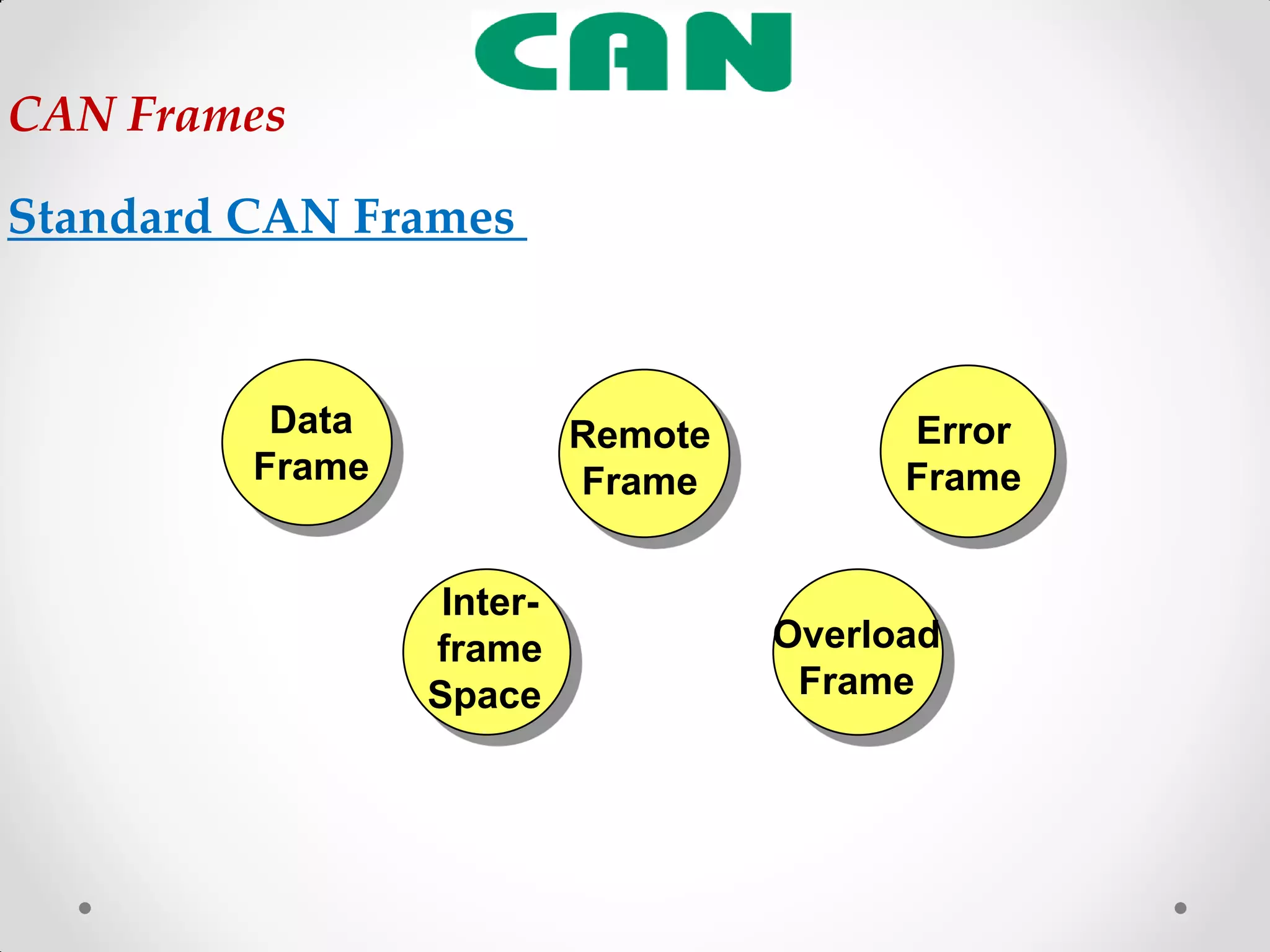
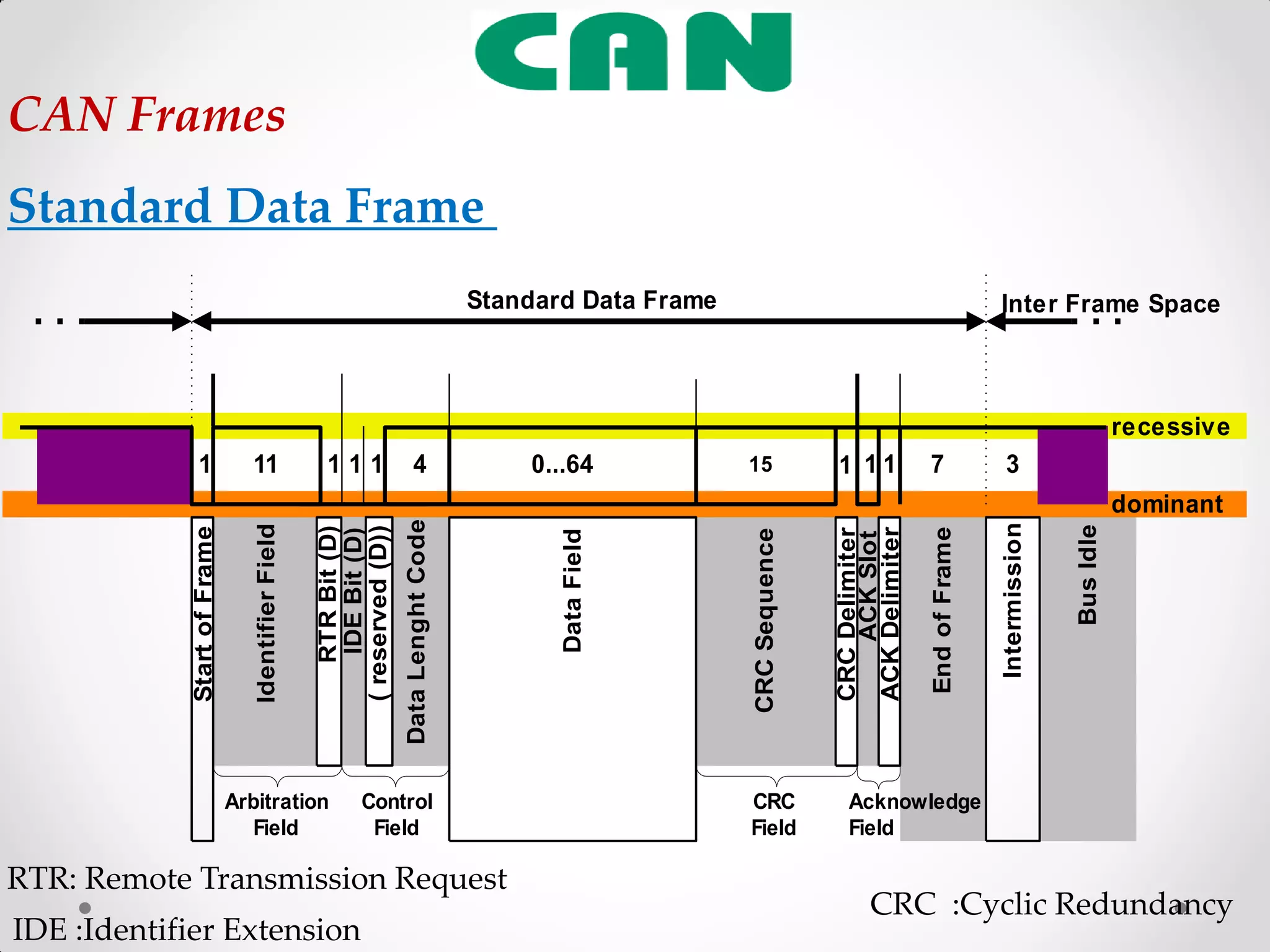
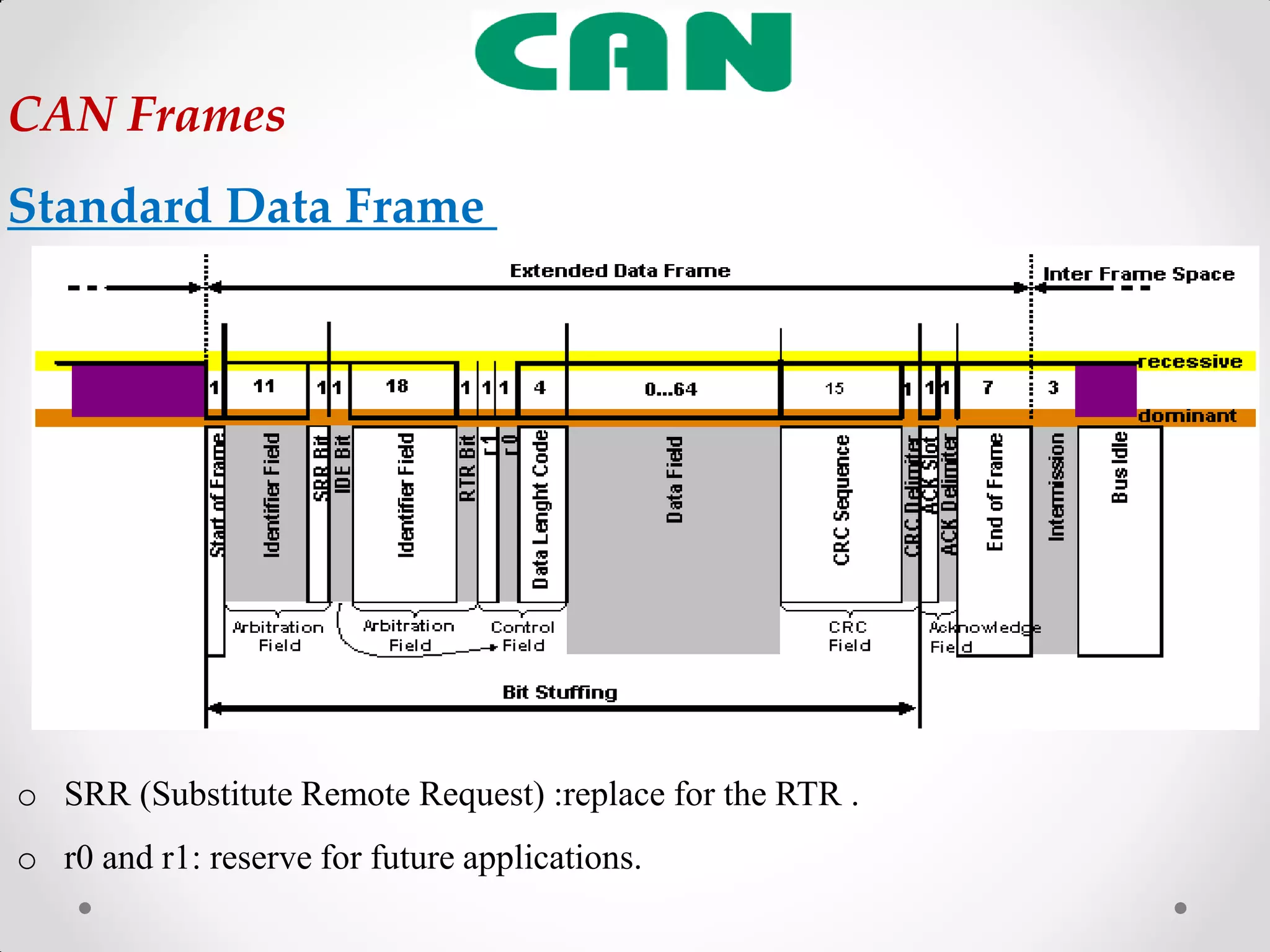
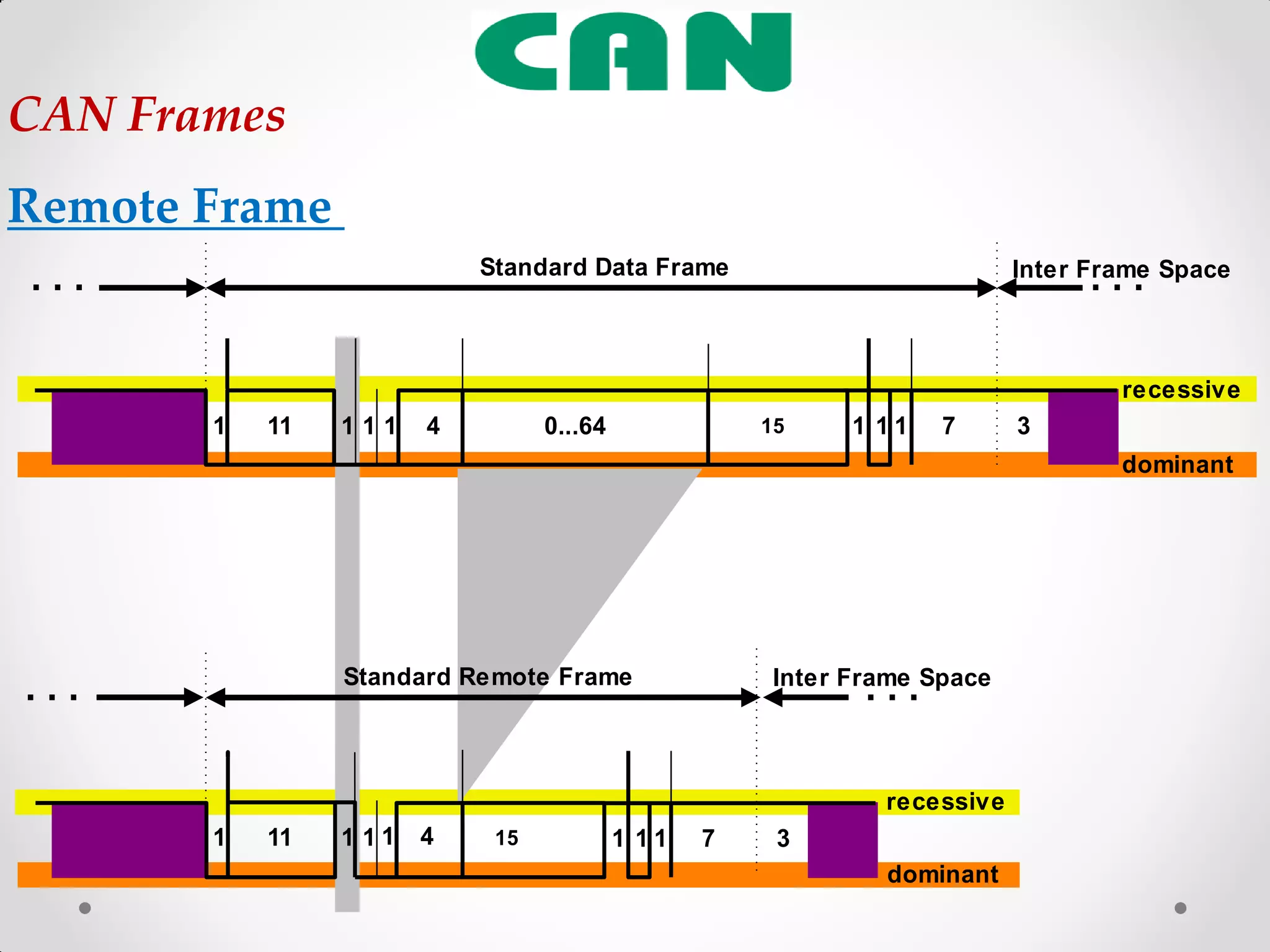
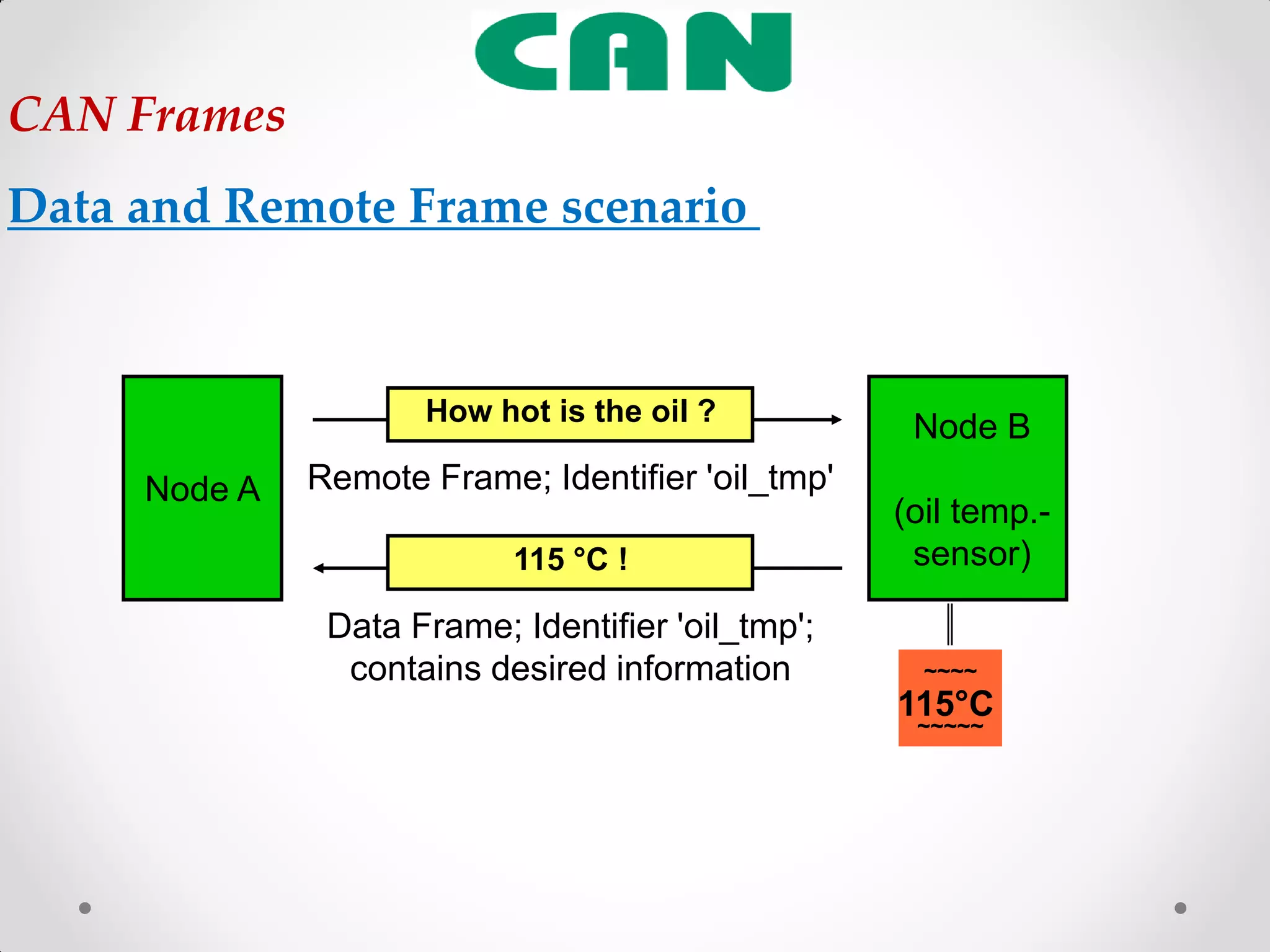
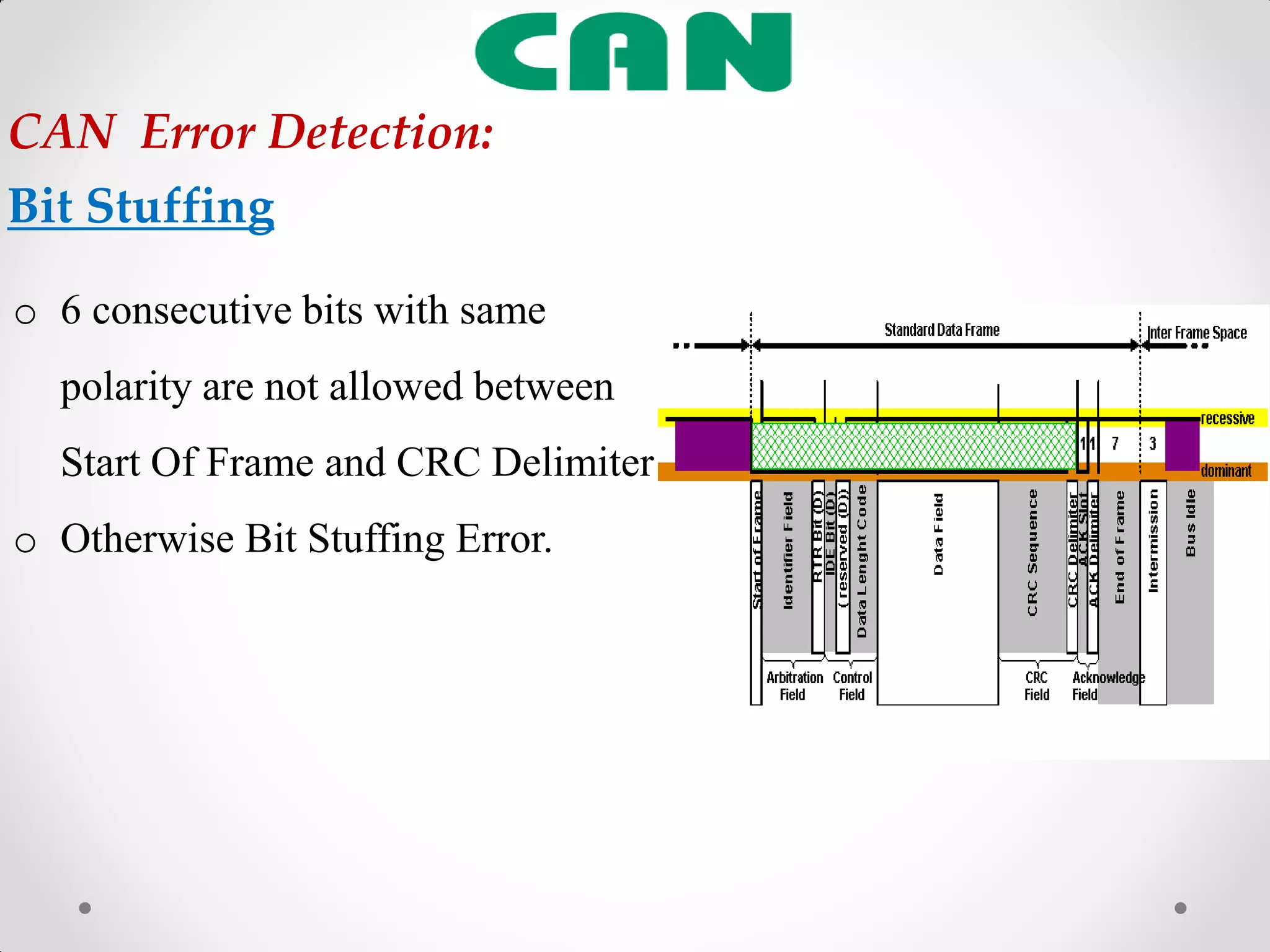
Discusses synchronization methods in CAN communication, including bit stuffing techniques and acknowledges the importance of edge detection for resynchronization.Various types of CAN frames including Data Frames, Remote Frames, Error Frames, and their components like identifiers, CRC, and inter-frame spaces.
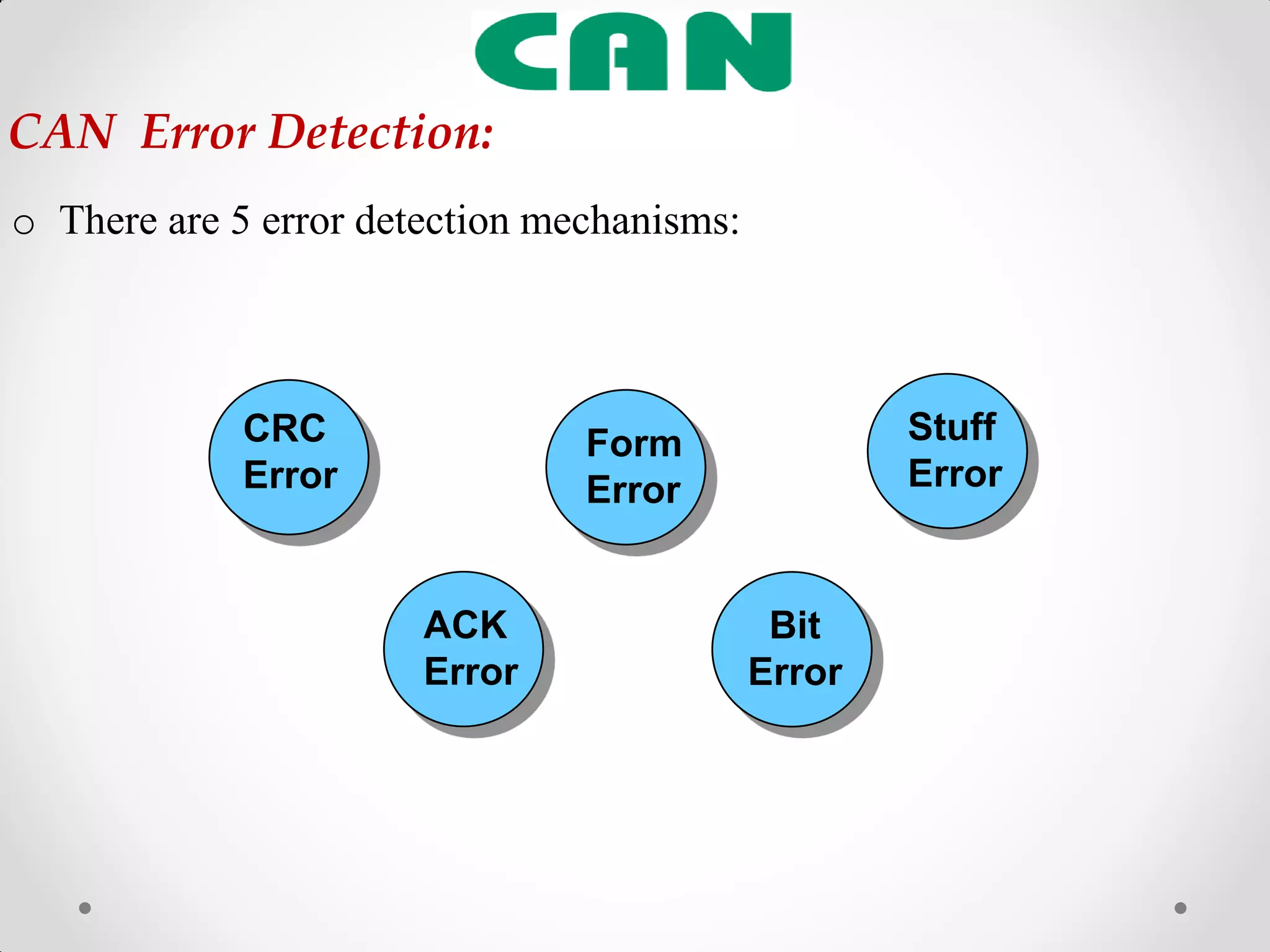
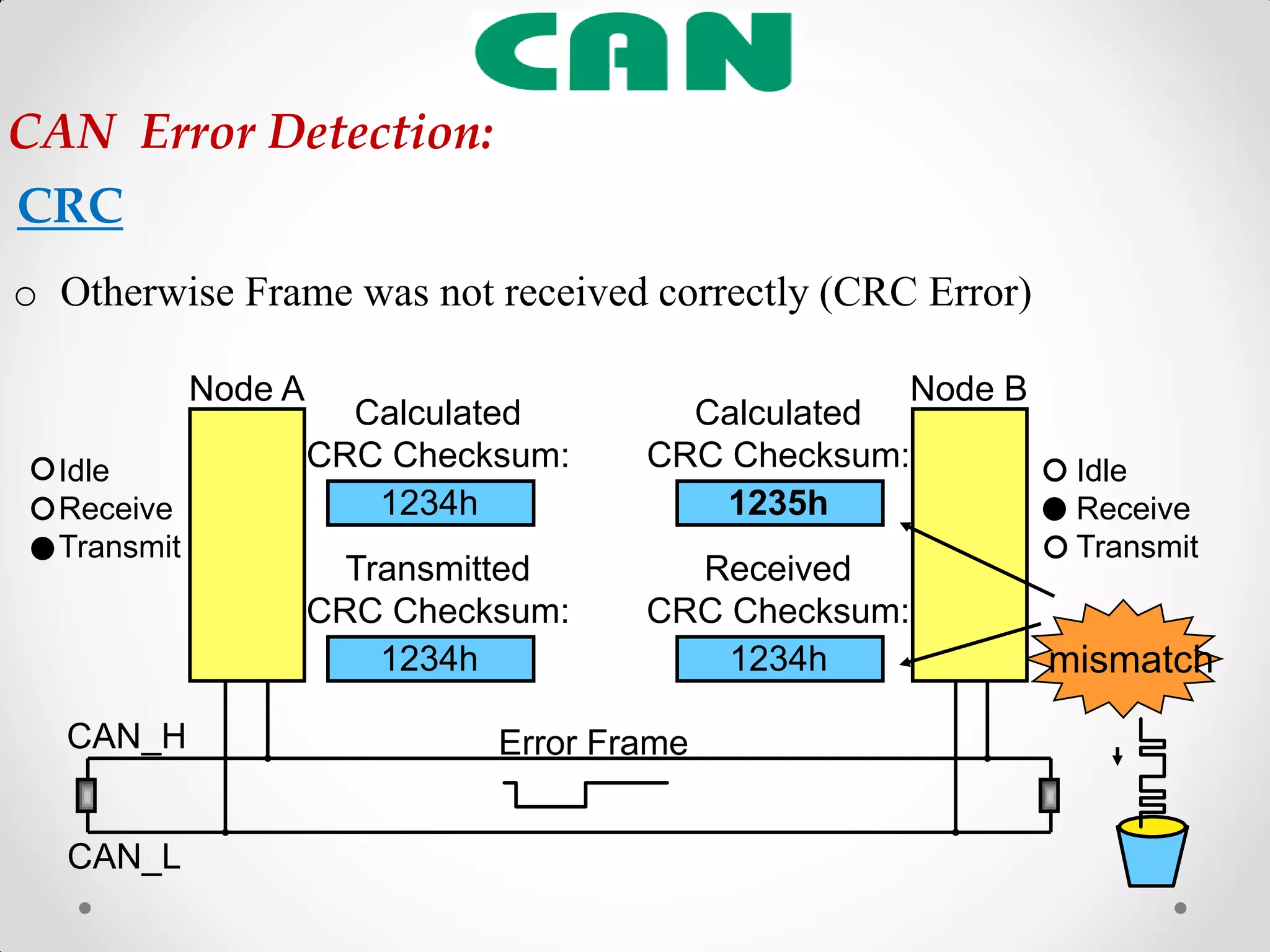
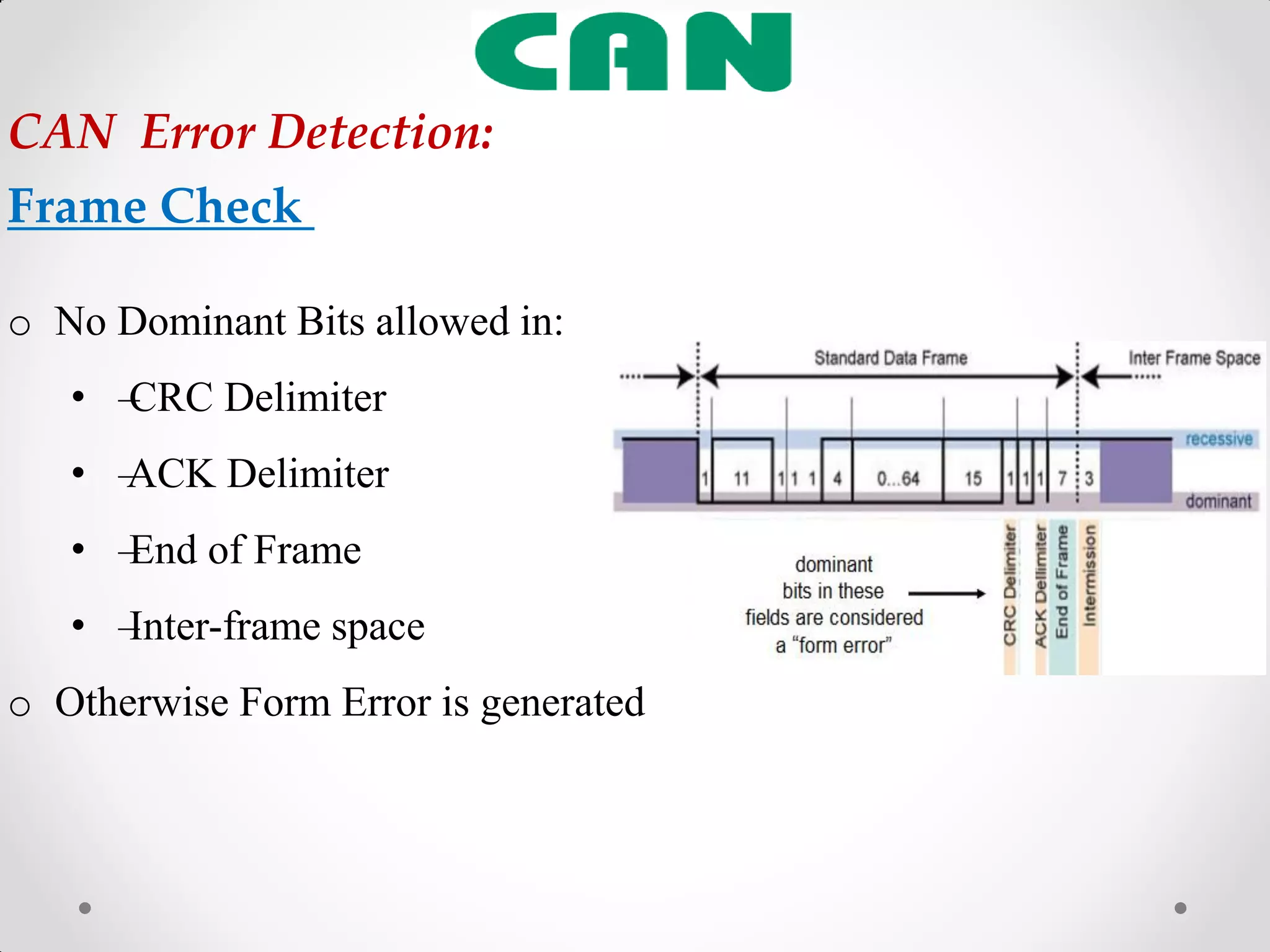
Describes the five error detection techniques in CAN including ACK error, bit monitoring, and CRC checks necessary for reliable message transmission.
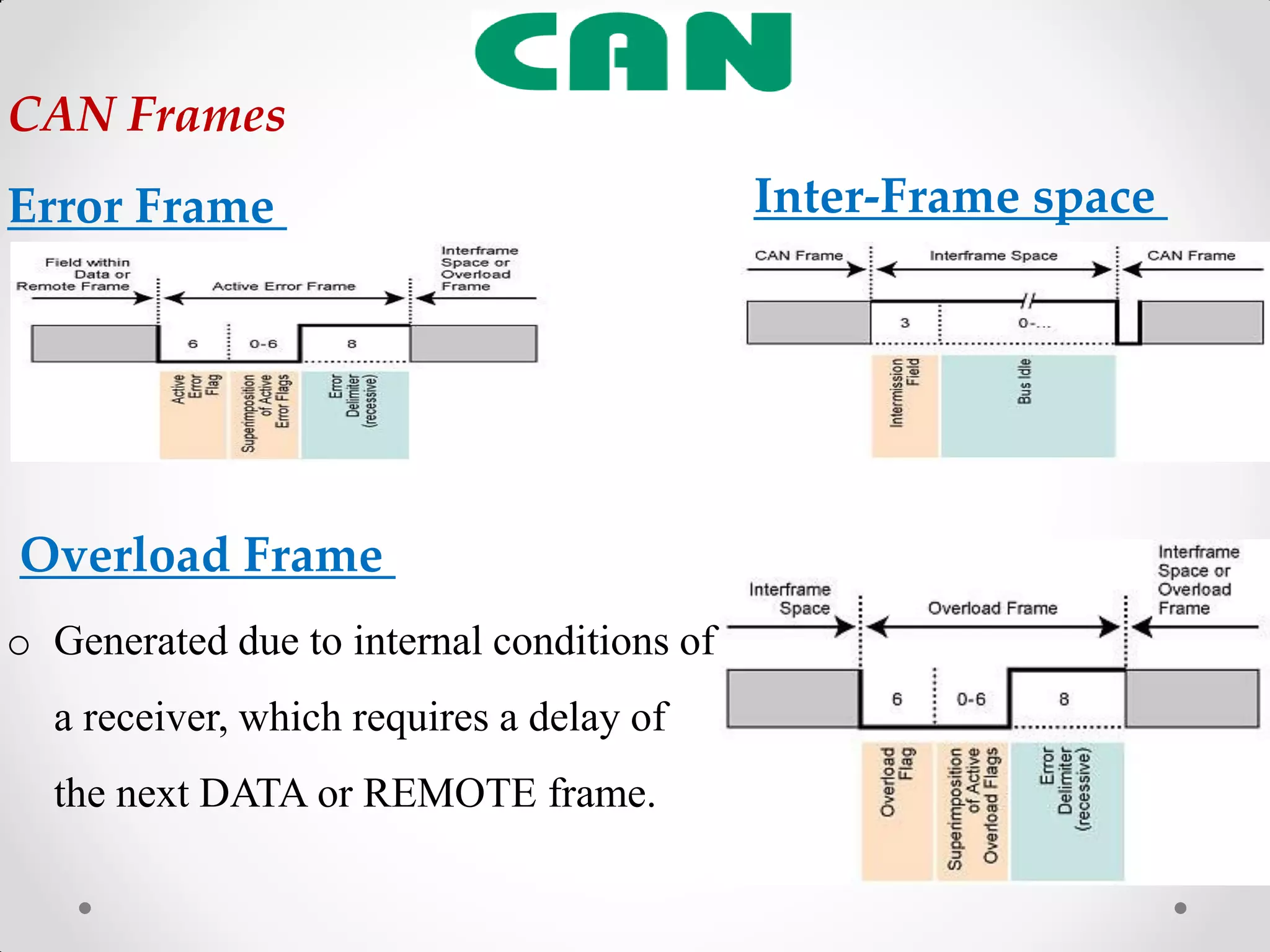
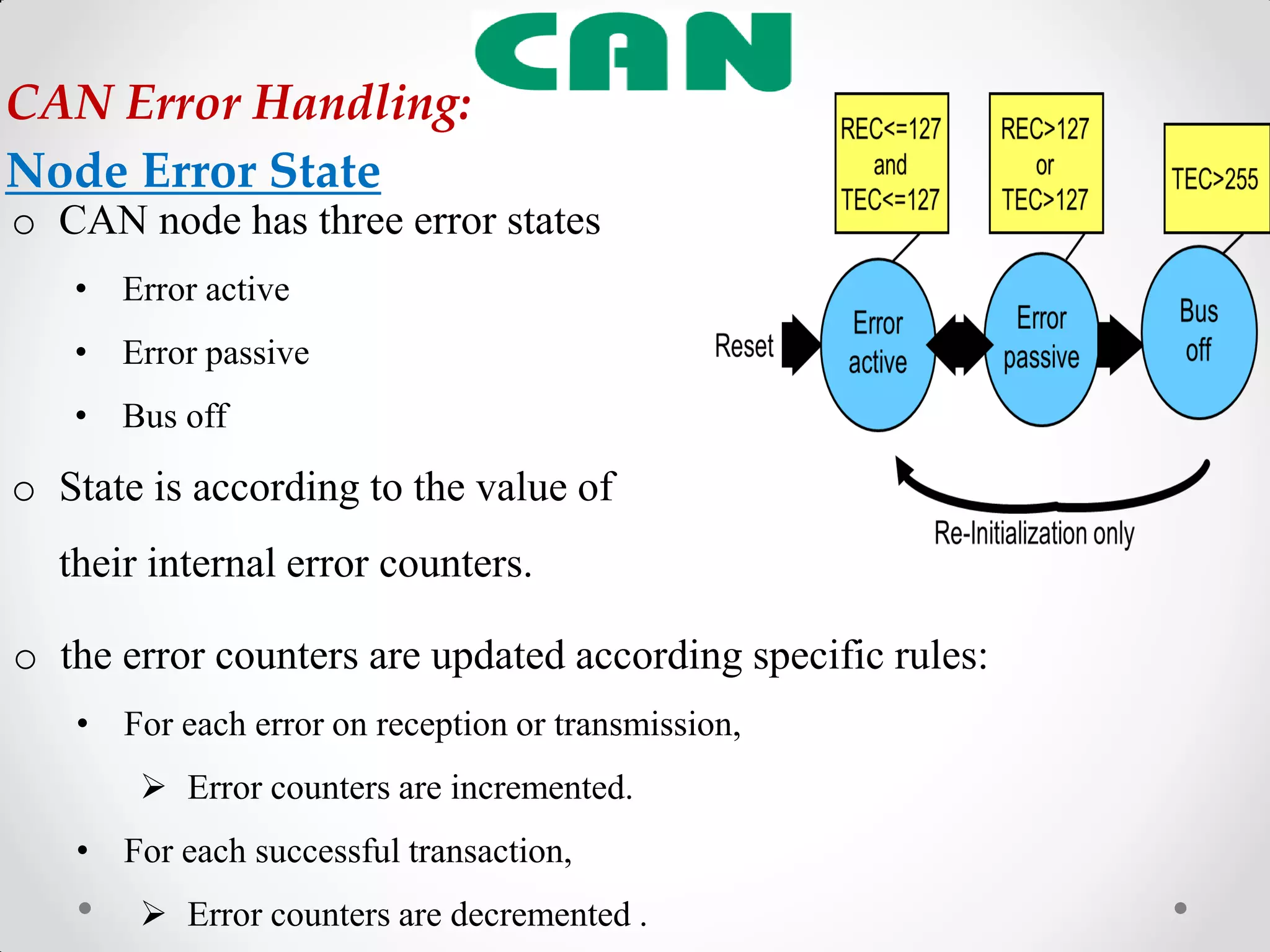
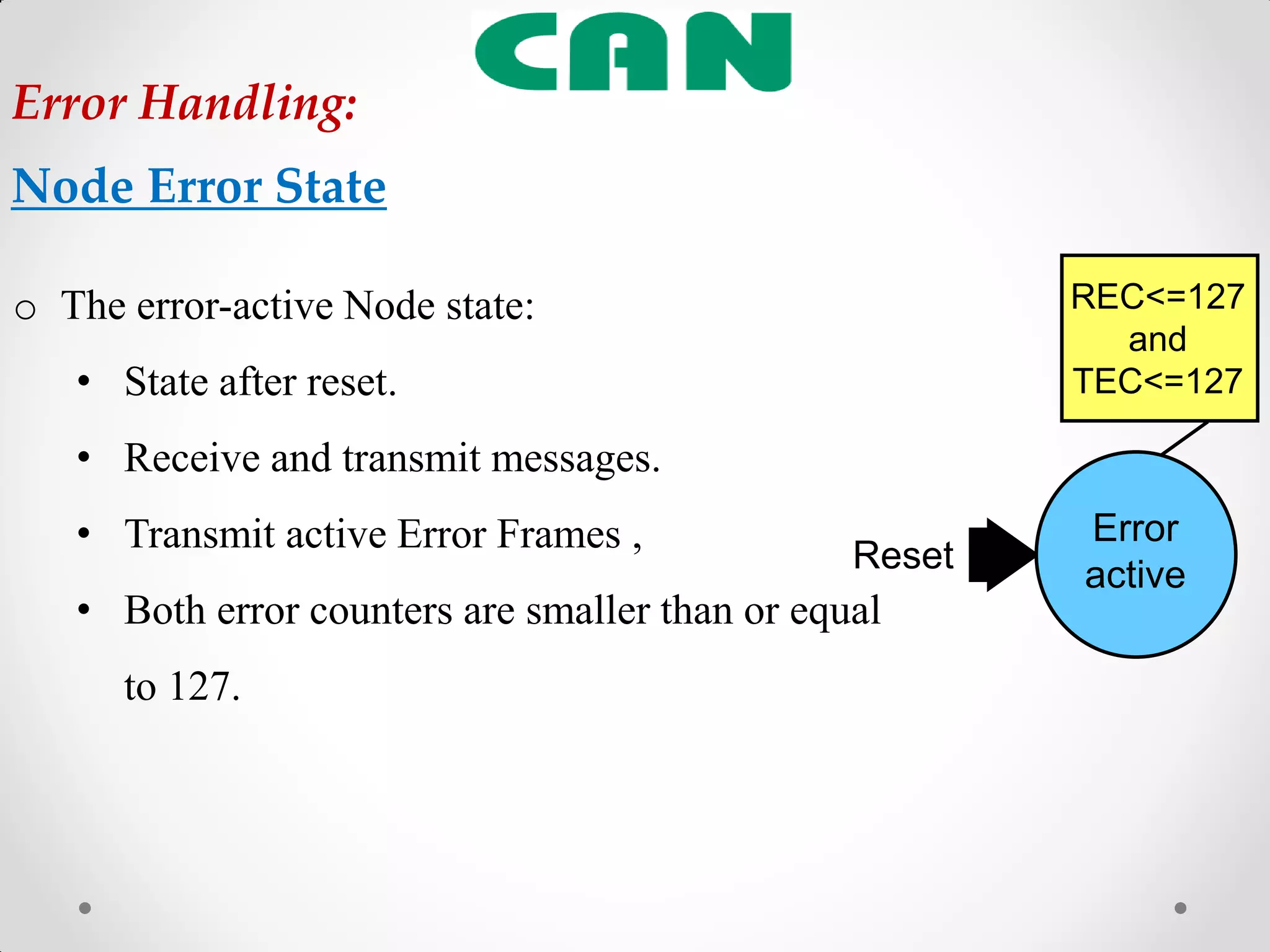
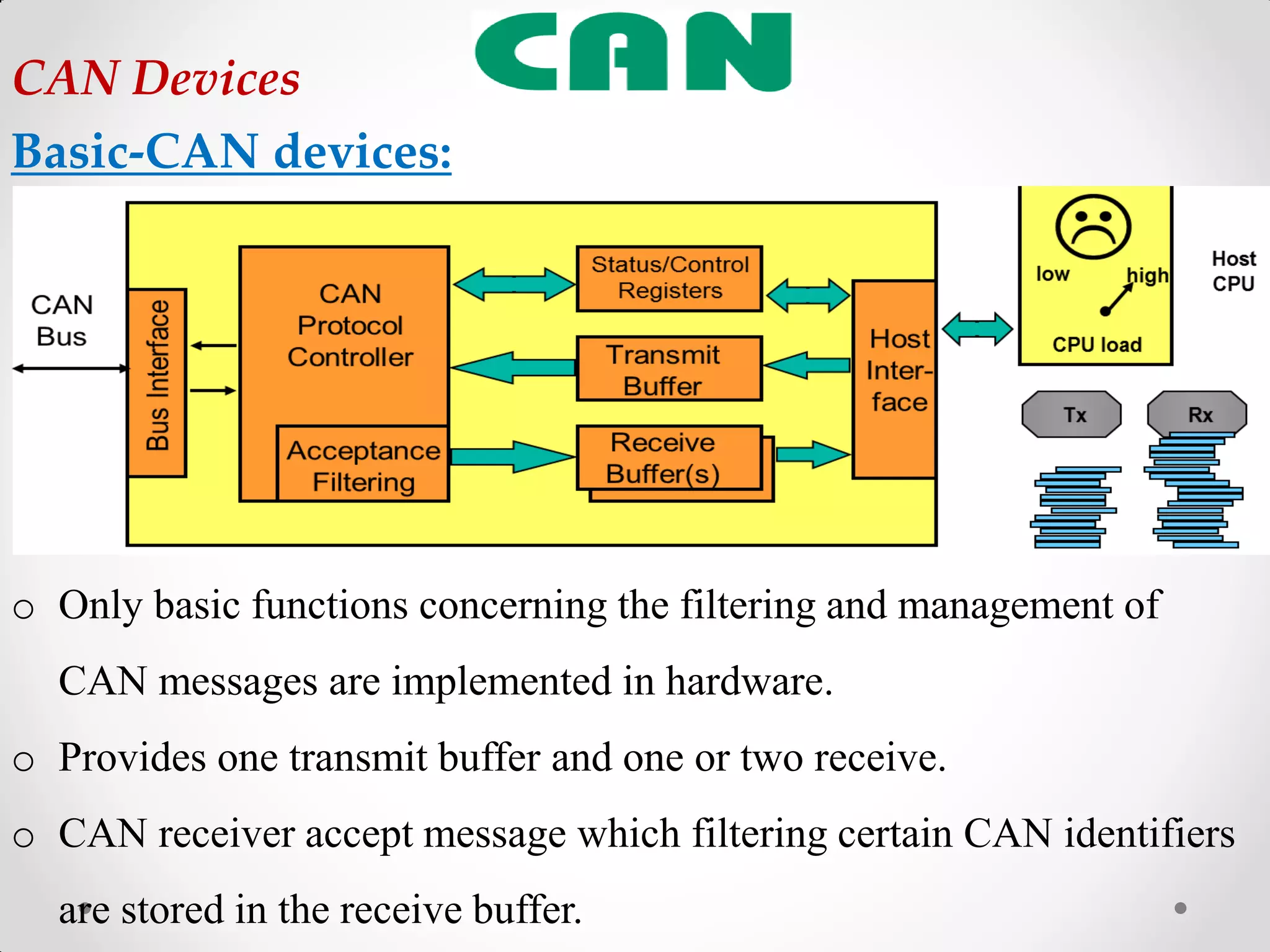
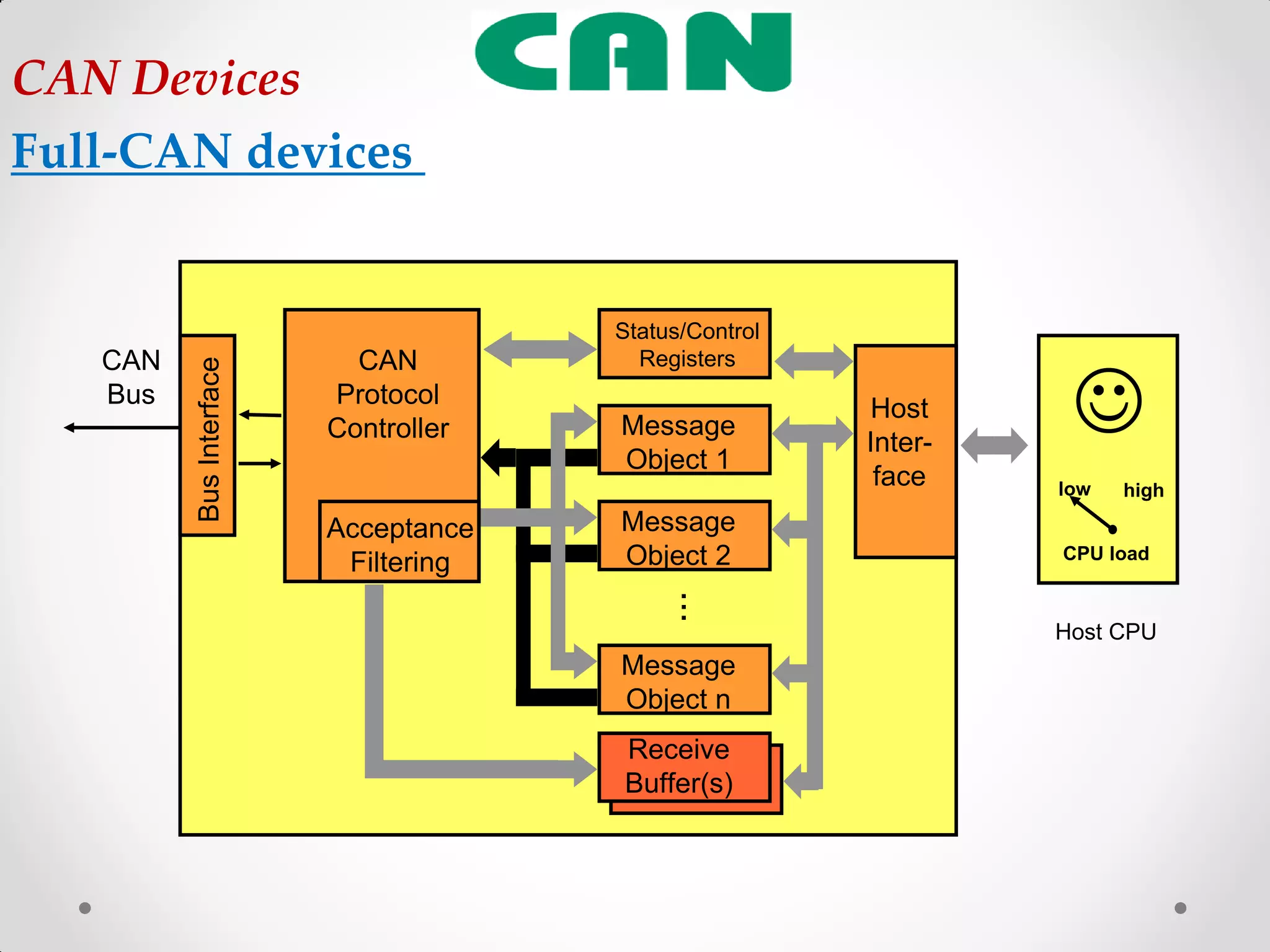
Explains error states (active, passive, bus-off) in CAN nodes and the associated error frame structures used for communication post-error occurrence.Describes types of CAN devices (Basic-CAN and Full-CAN), their functionalities, CPU load implications, and suitability for different network conditions.