Downloaded 23 times

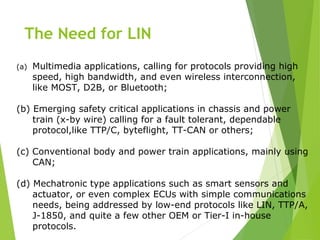
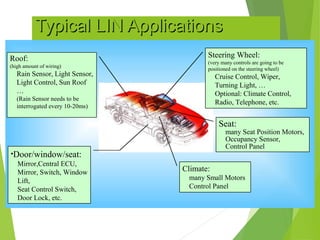
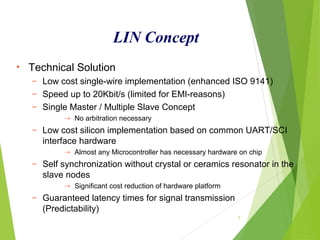
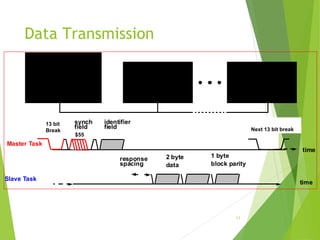
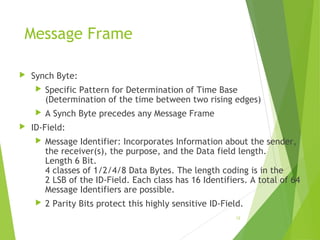
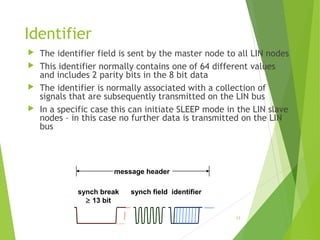
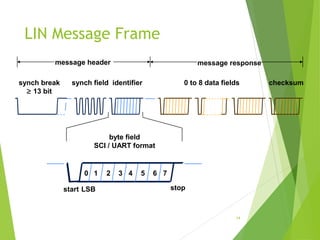
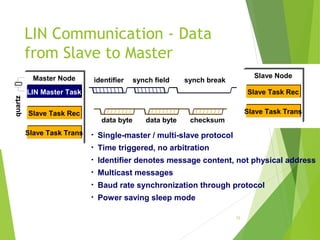
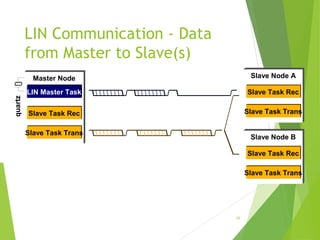
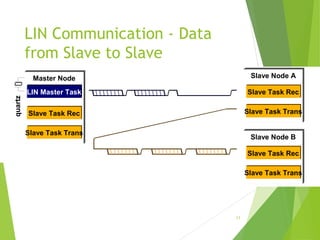
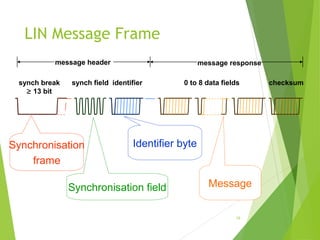

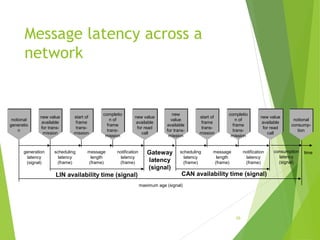



LIN is a serial communication protocol typically used in automotive applications for low-cost applications with low-speed communication needs. It uses a single-wire implementation with a maximum speed of 20kbps. LIN uses a master-slave topology with one master node that controls message scheduling and up to 16 slave nodes. Messages contain a sync field, identifier, optional data bytes, and checksum. The protocol provides deterministic latency and supports power saving sleep modes.