Downloaded 1,719 times



The document provides an overview of Adaptive Cruise Control (ACC), explaining its functionality, components, and operational principles. ACC allows vehicles to automatically adjust their speed to maintain a safe distance from slower-moving vehicles using radar technology. It discusses its advantages, disadvantages, historical development, and future implications for automotive safety.
Introduction to ACC and its components including principles, definitions, and overview.
ACC adapts vehicle speed to traffic using radar, introduced in the 1970s, enables driverless speed adjustments.
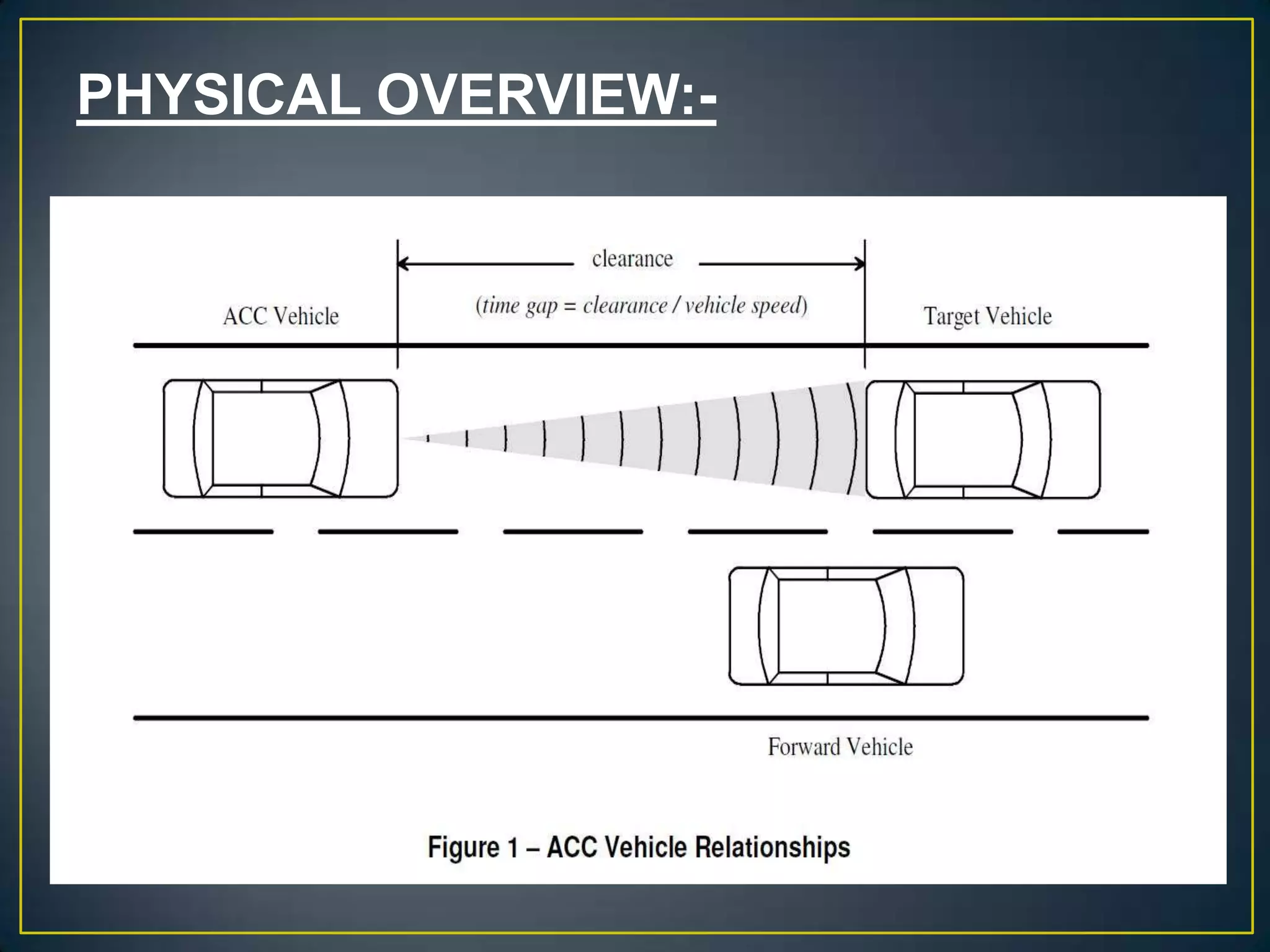
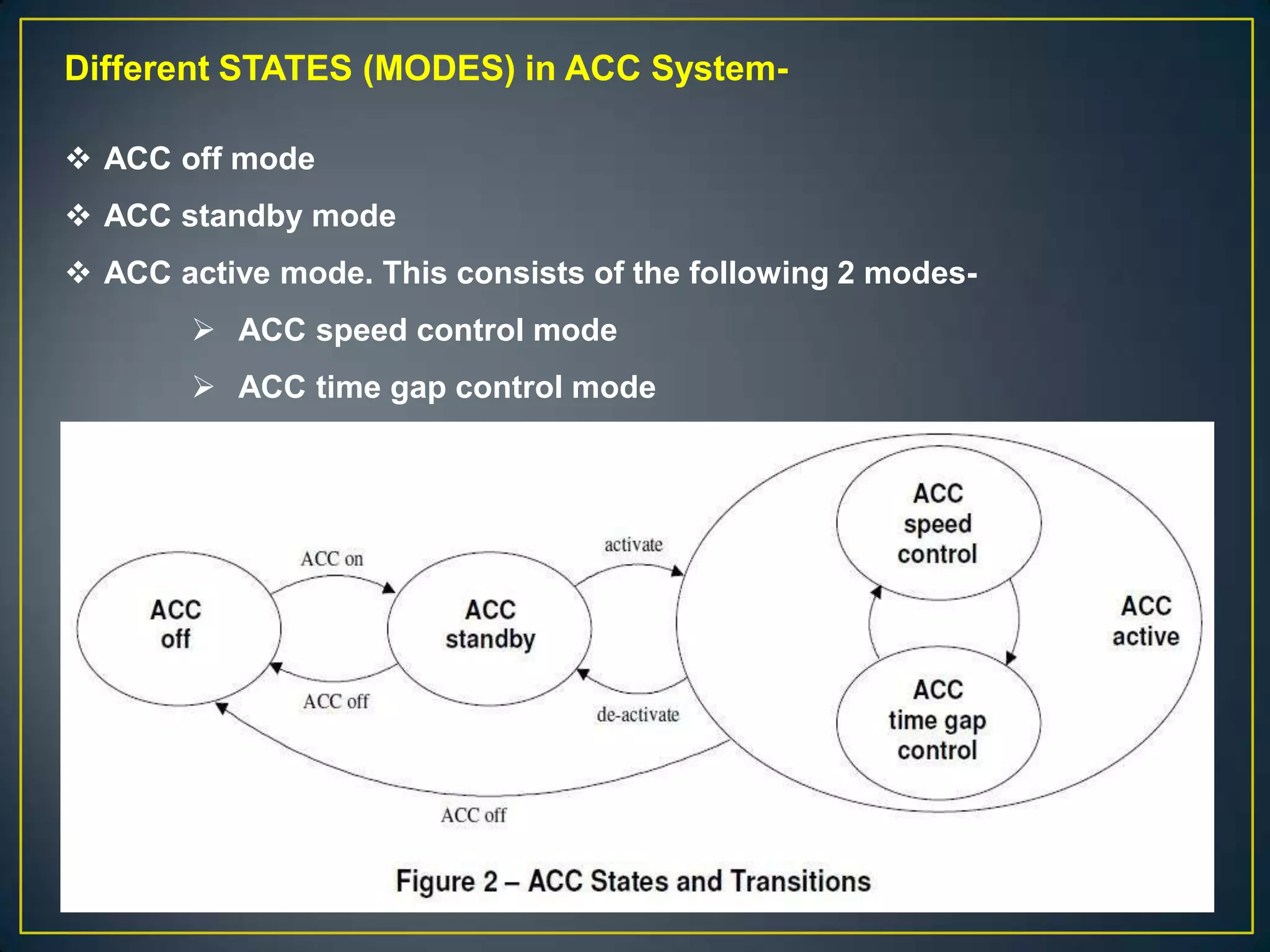
Key terms include ACC vehicle, clearance, target vehicle, and modes of operation (off, standby, active).
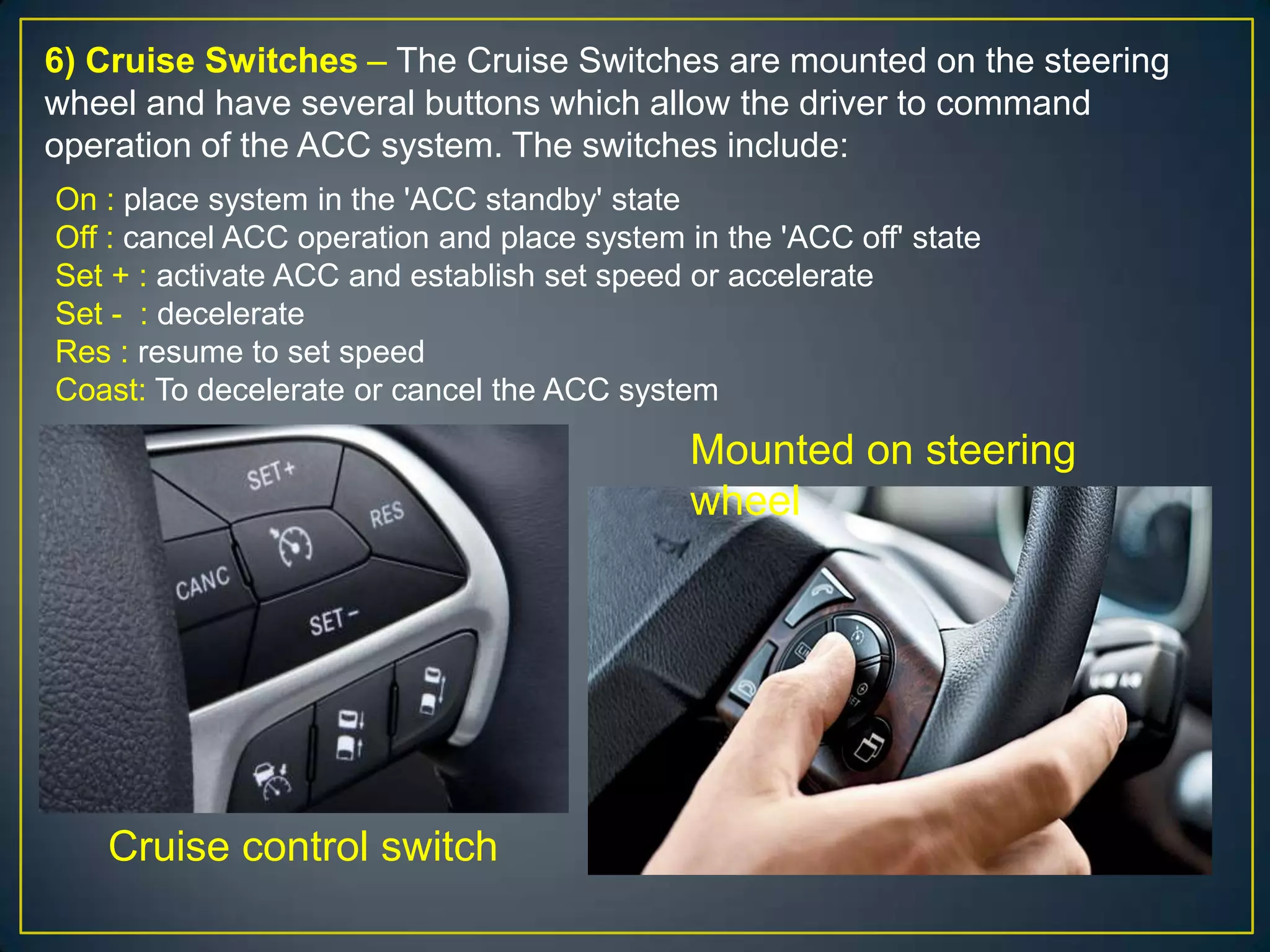
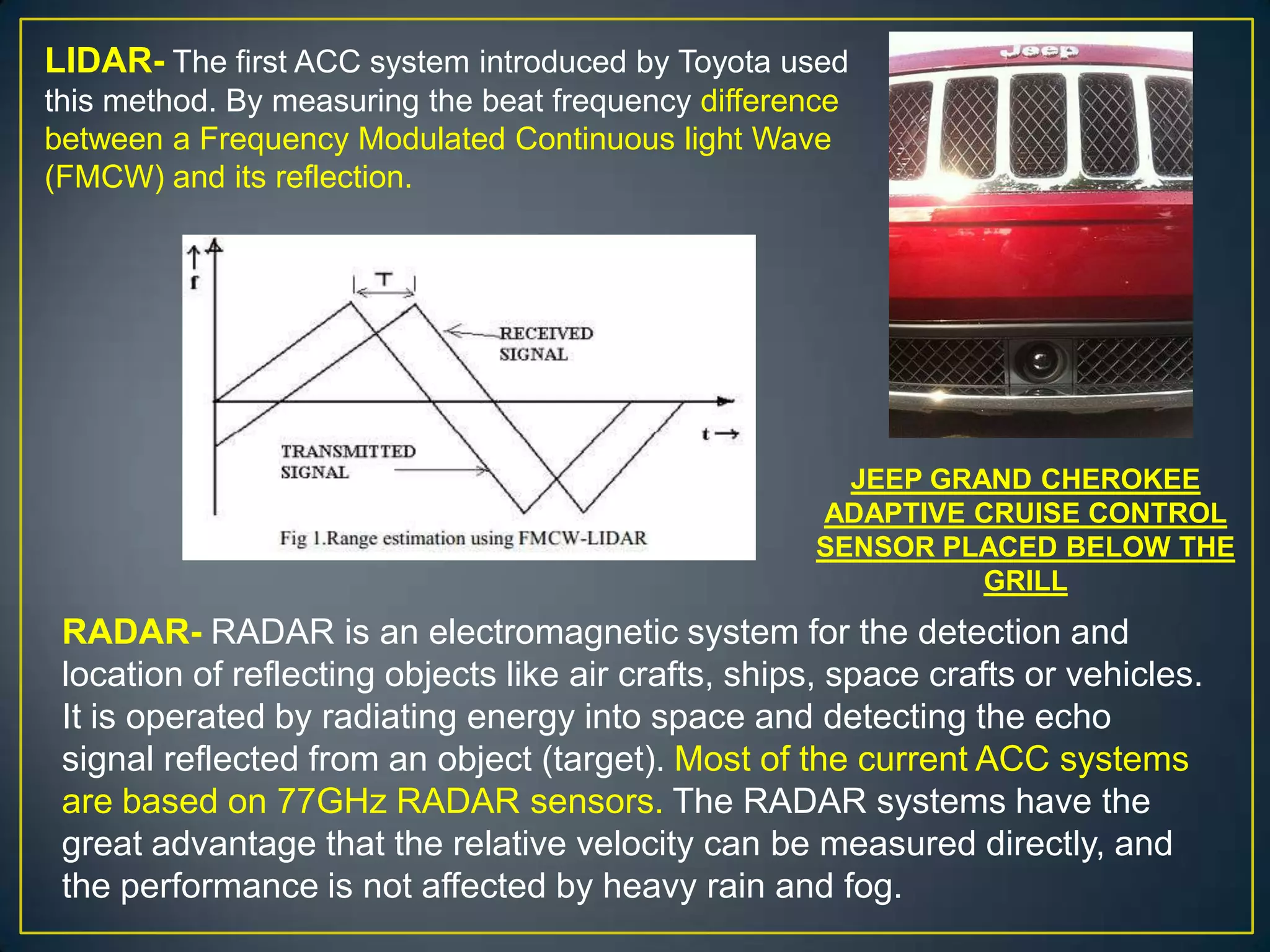
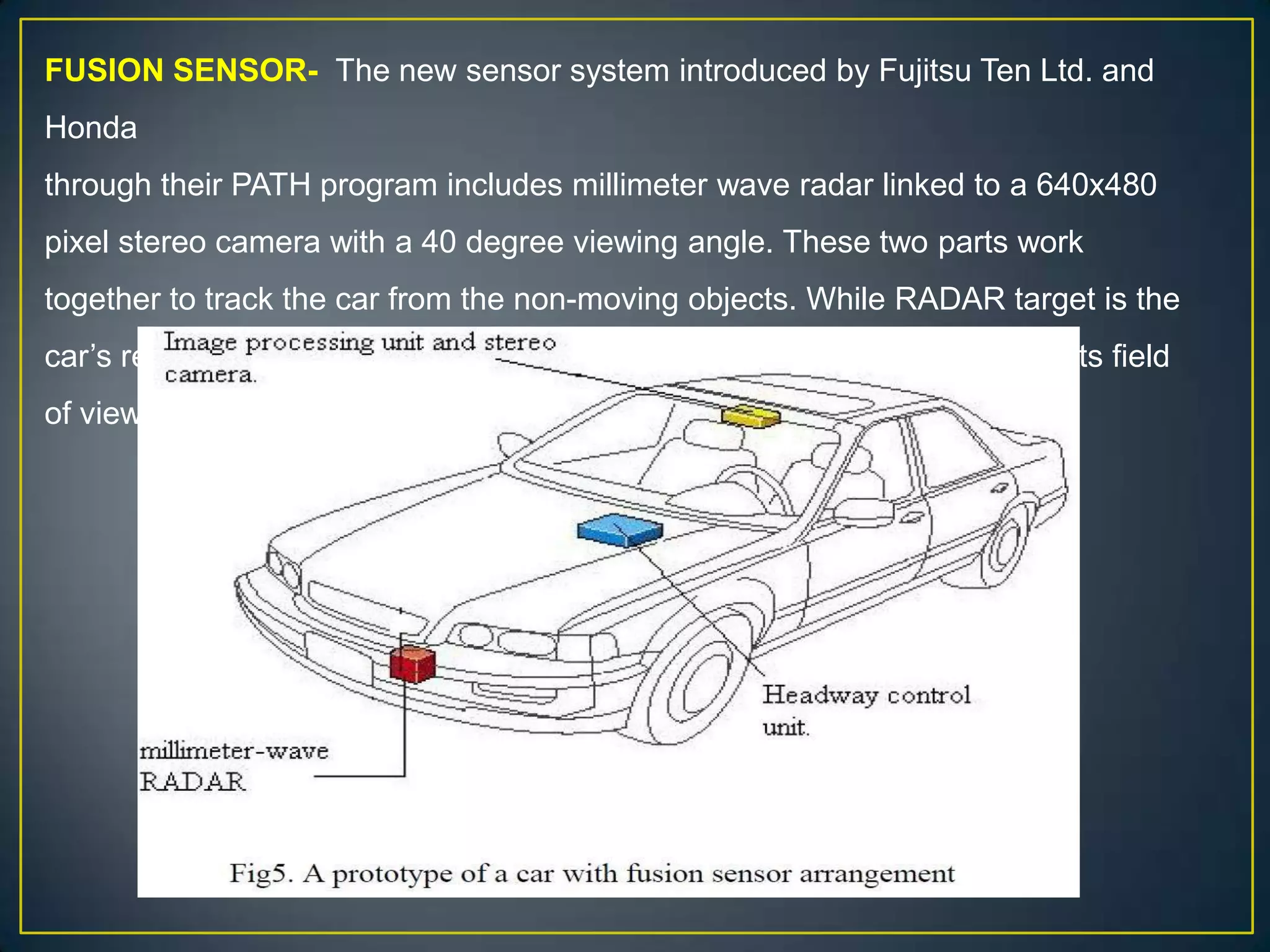
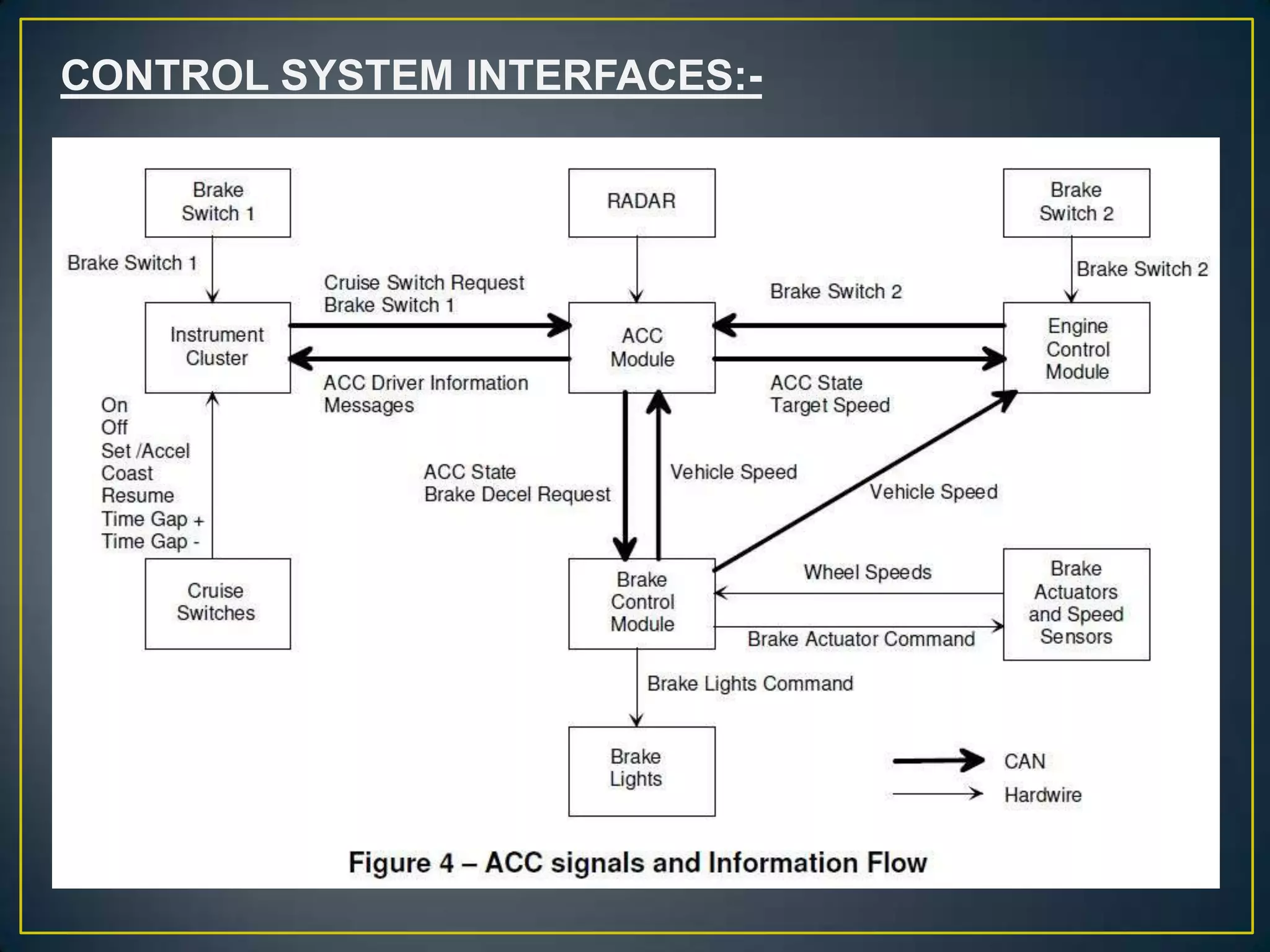
Essential components include ACC Module, Engine Control, Brake Control, CAN, and various sensors like RADAR and LIDAR.
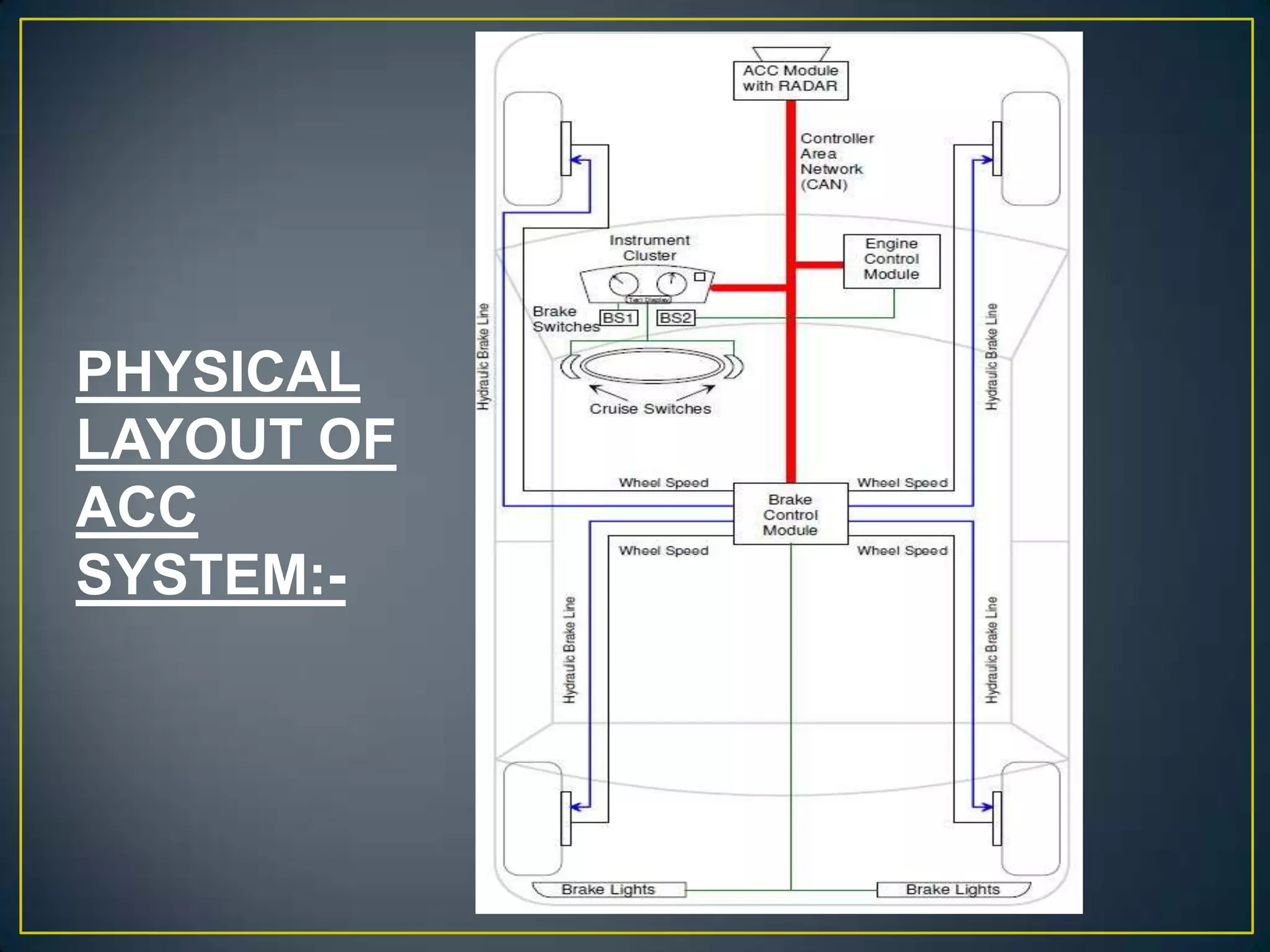
Descriptions of interfaces and physical layout of the ACC system.
Benefits include reduced driver workload in traffic, enhanced traffic system responsiveness, and improved fuel efficiency.
Challenges include cost, potential driver negligence, malfunction risks, and limited response to traffic signals.
Historical introduction of ACC systems by various automakers since 1995, highlighting technological advancements.
ACC systems aim to reduce accidents significantly, with future developments towards fully AI-assisted vehicles.























































































