Downloaded 168 times

















This document discusses pulse amplitude modulation (PAM). PAM is a digital modulation technique where the amplitude of pulses is varied to represent data symbols. In PAM, each pulse amplitude corresponds to a data symbol value. The document discusses binary and M-ary PAM schemes. It also covers topics like intersymbol interference, eye diagrams, Nyquist pulse shaping criteria, and raised cosine pulse shaping to minimize intersymbol interference at the receiver. PAM is used to convert discrete amplitude symbols into analog pulses for transmission over a channel, and the receiver demodulates the signal to recover the data symbols.
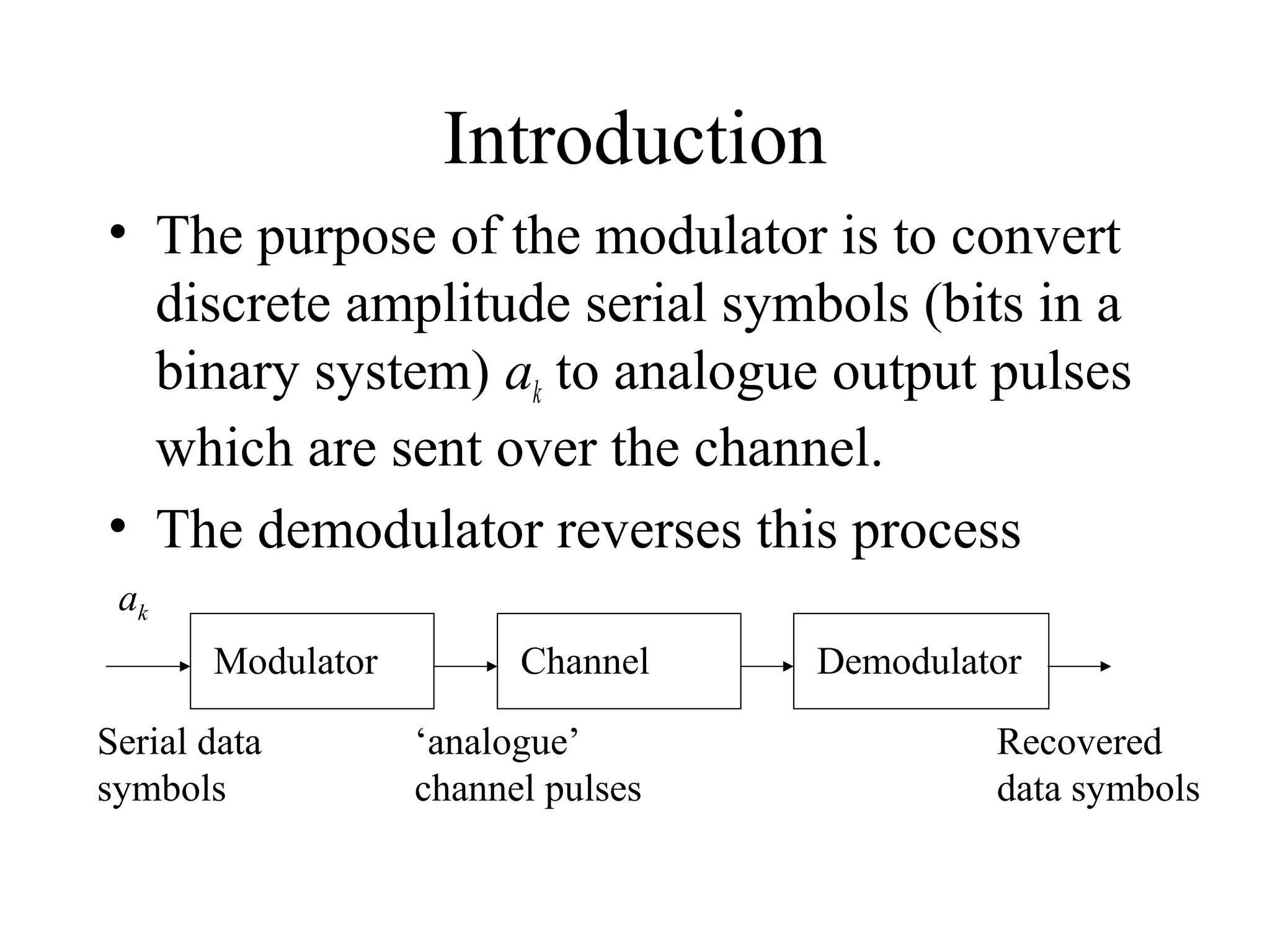
Introduction to Pulse Amplitude Modulation (PAM), its purpose, and modulation methods including PWM and PPM.
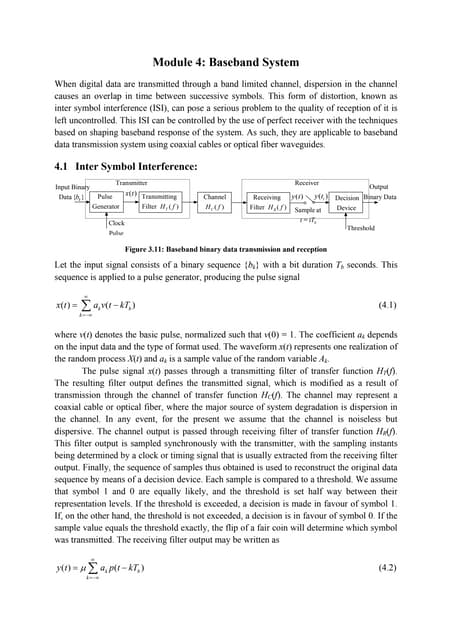
Description of PAM as a signaling technique, binary and multilevel PAM systems, and the signal generation process.
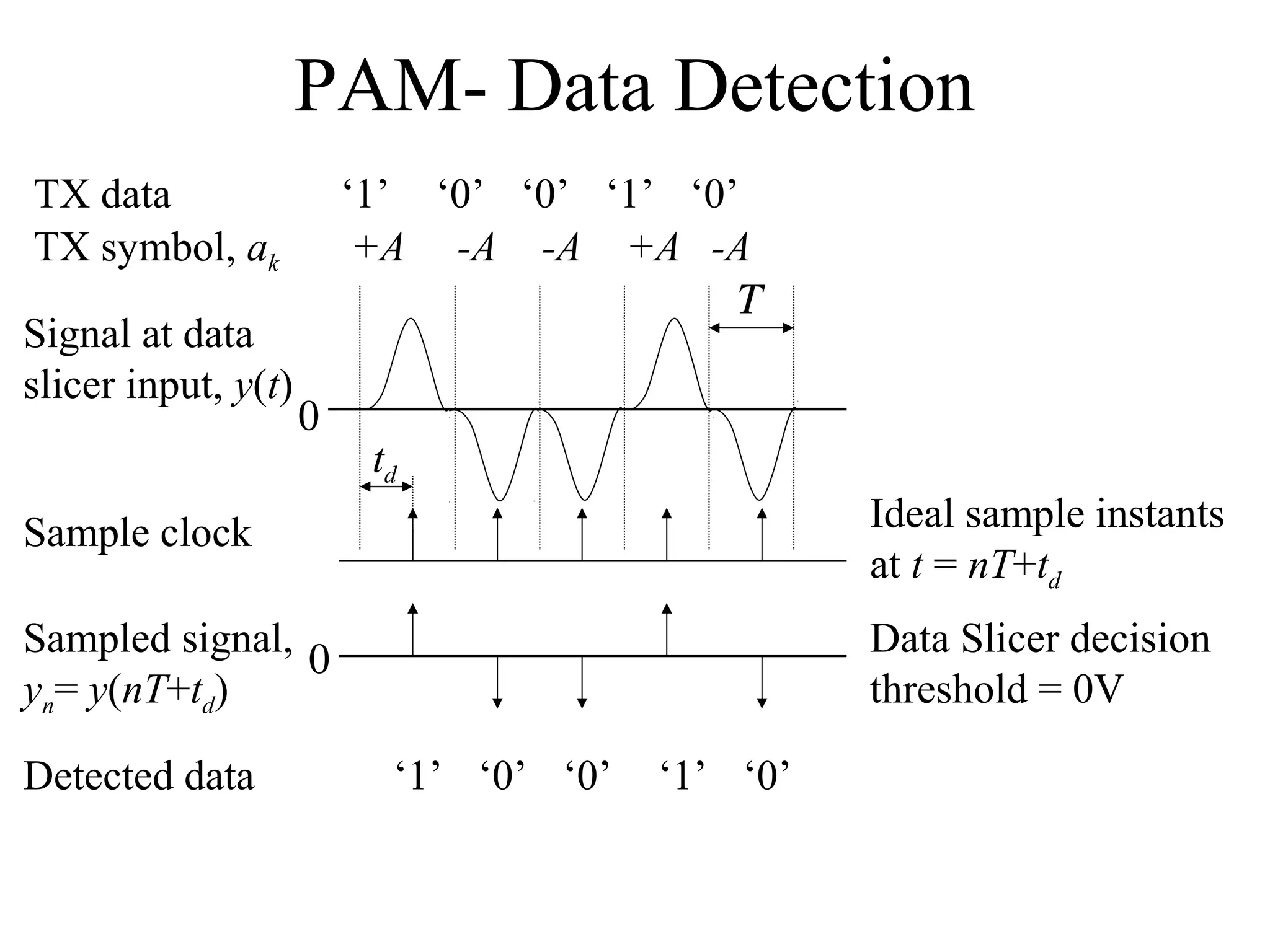
Process of data detection using sampling and decision thresholds in PAM systems, ensuring recovery of transmitted data.
Importance of synchronization in PAM for accurate clock signal extraction, related challenges, and solutions.
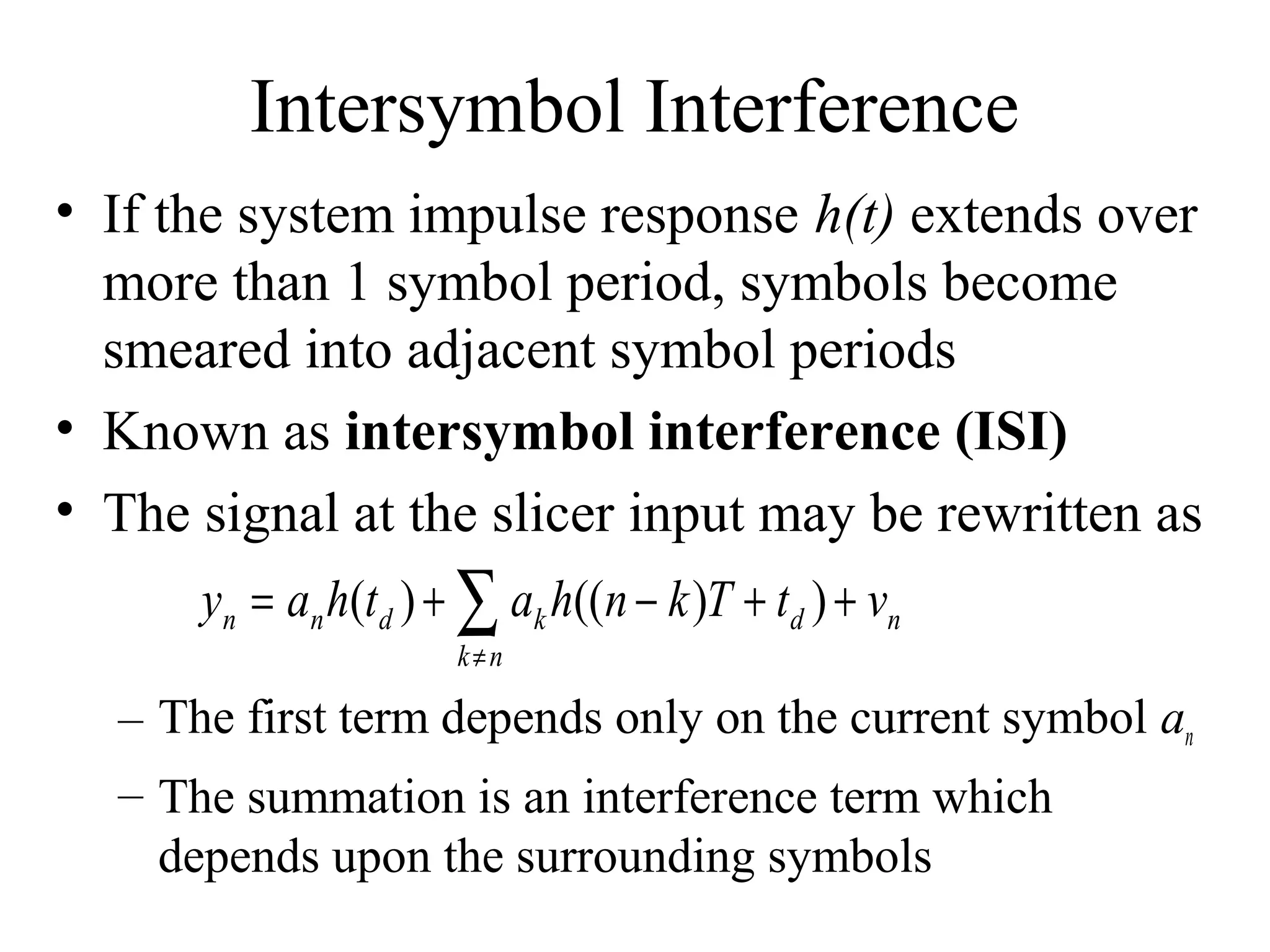
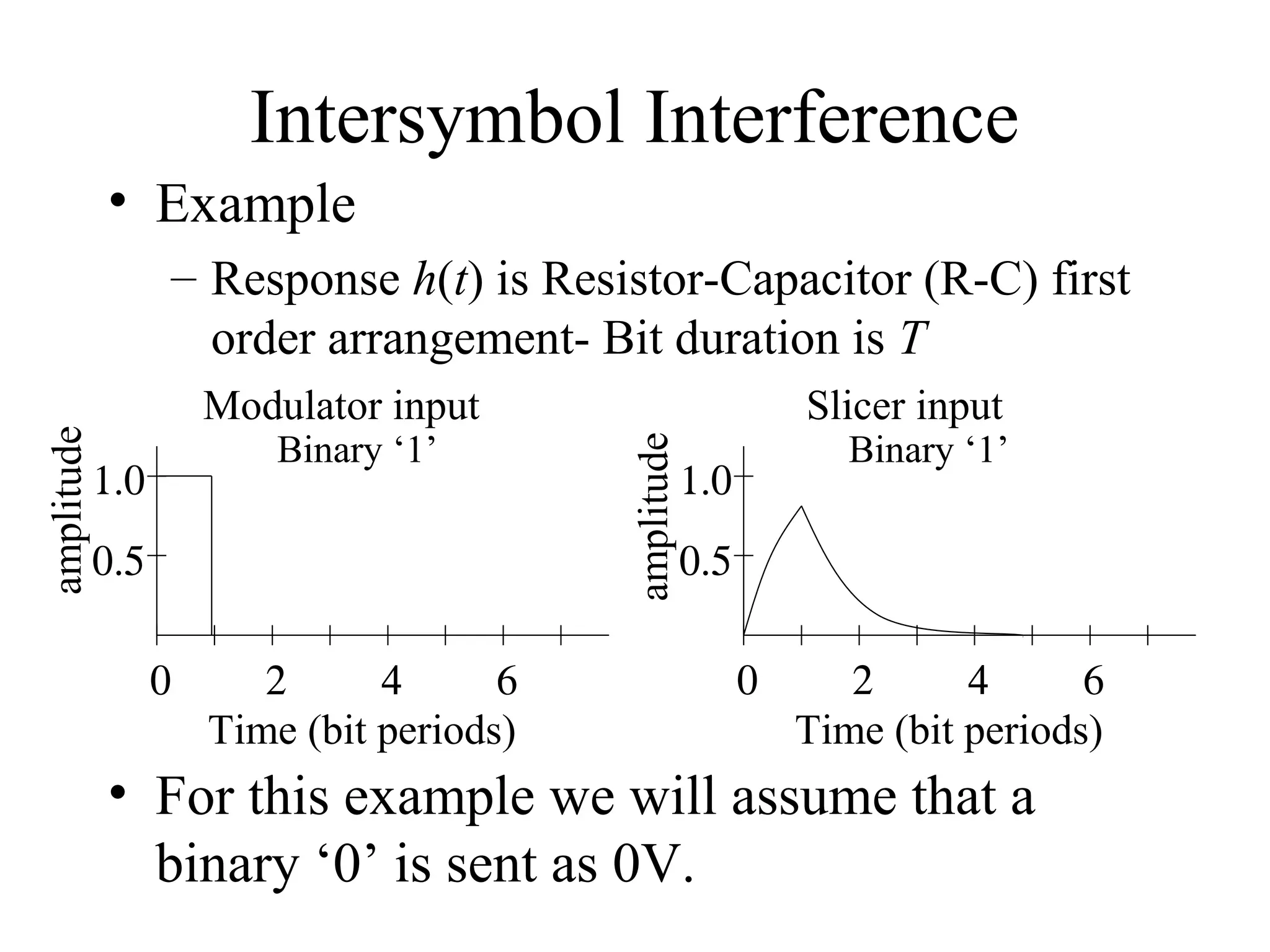
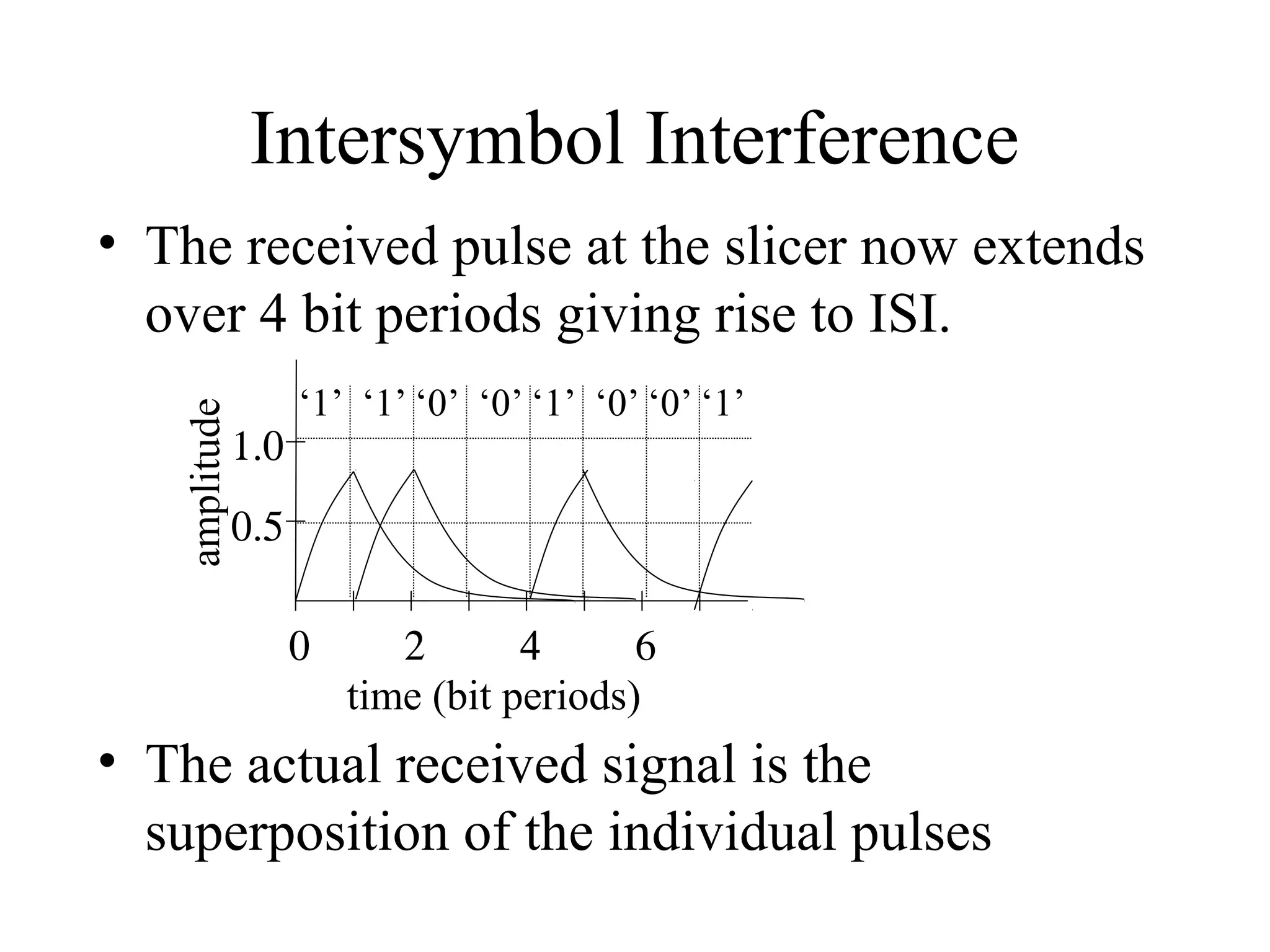
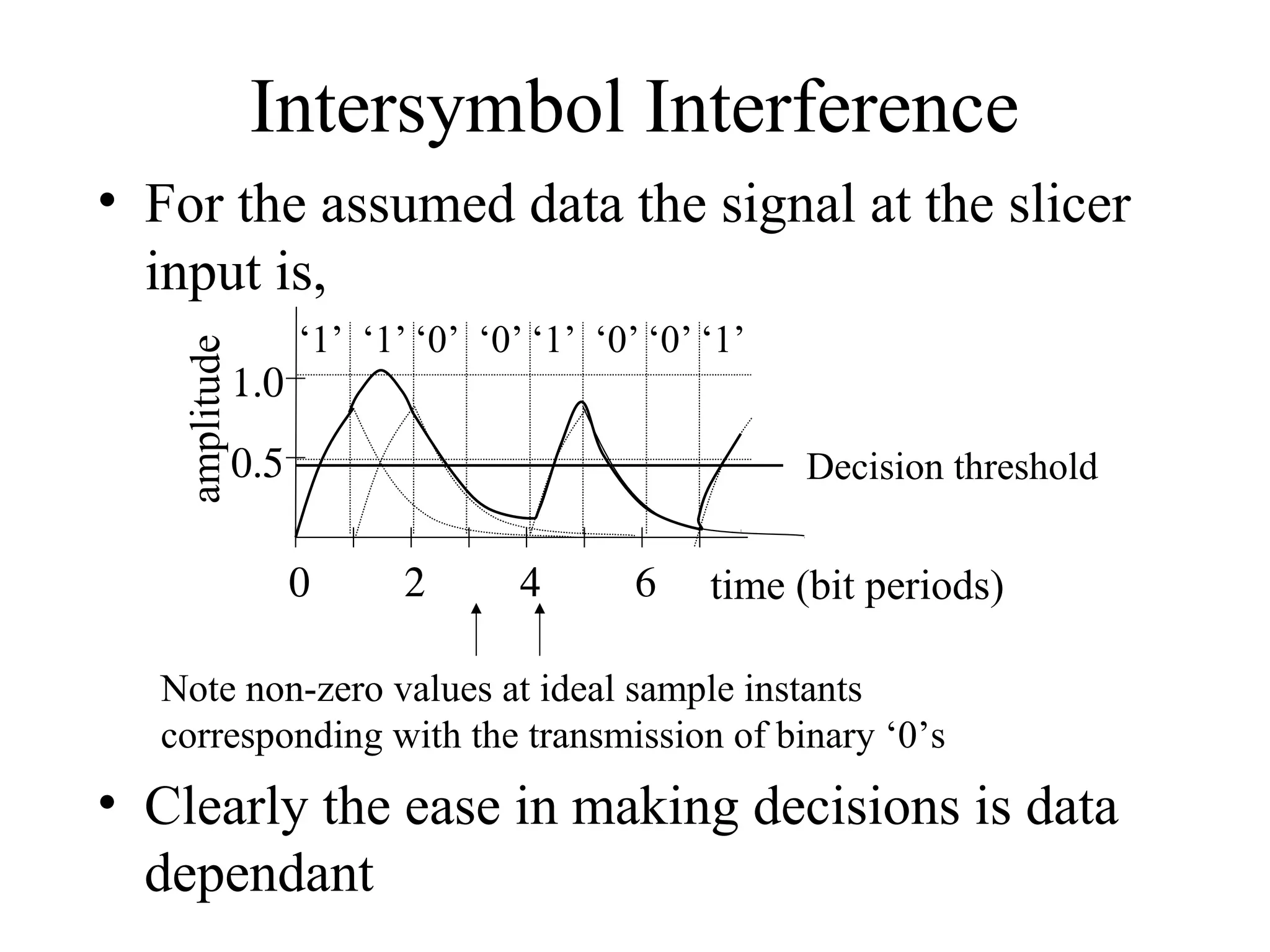
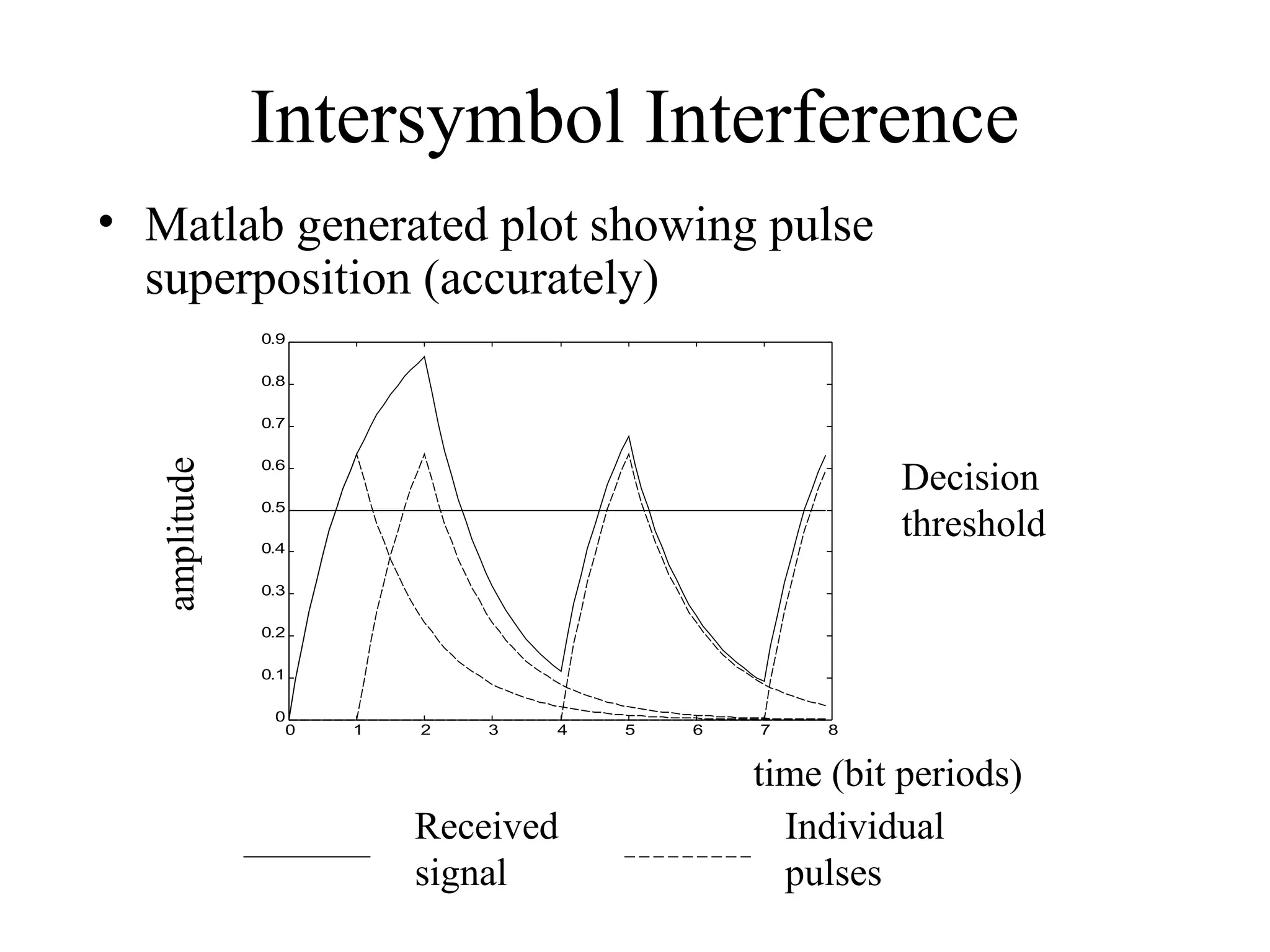
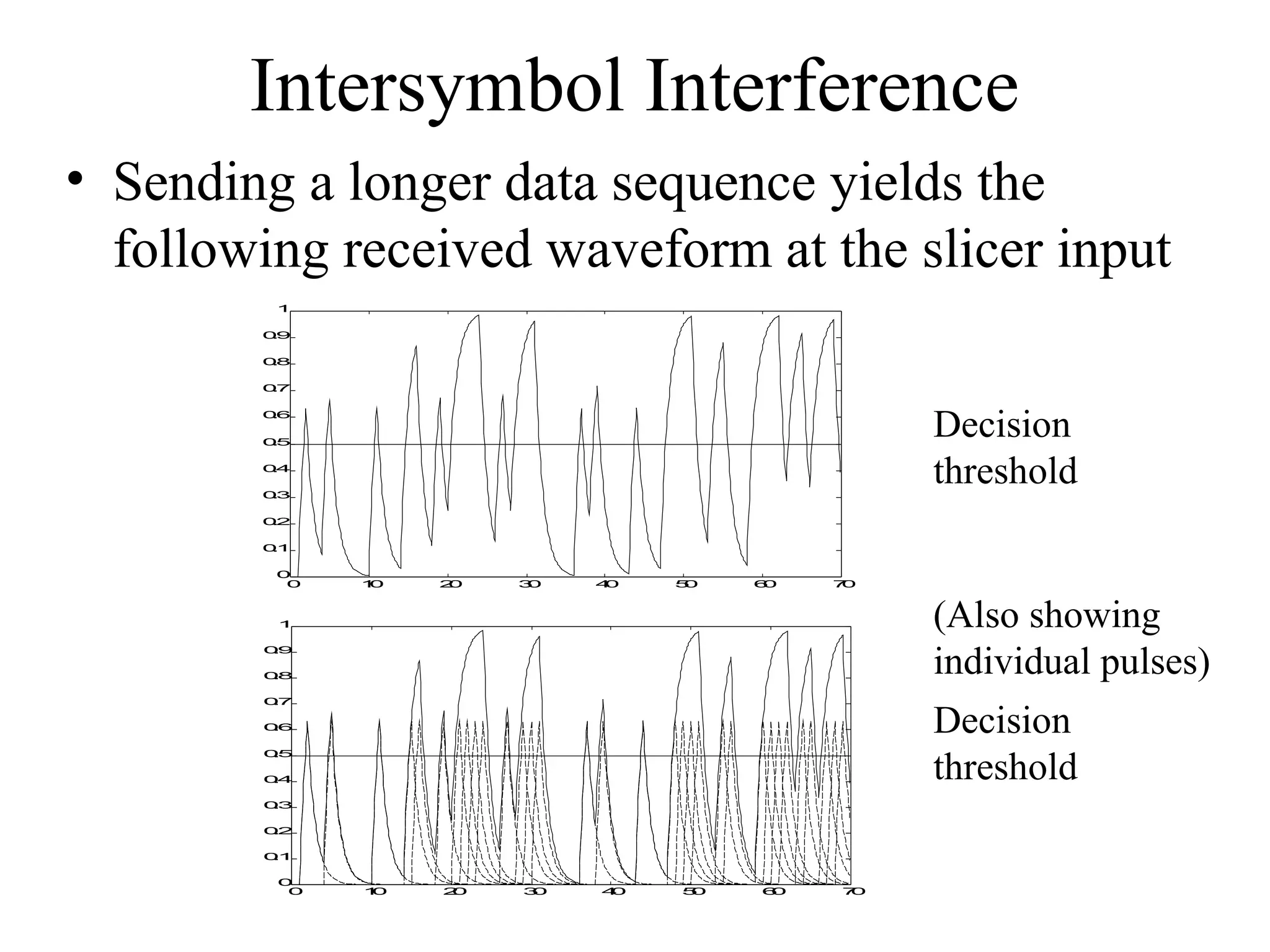
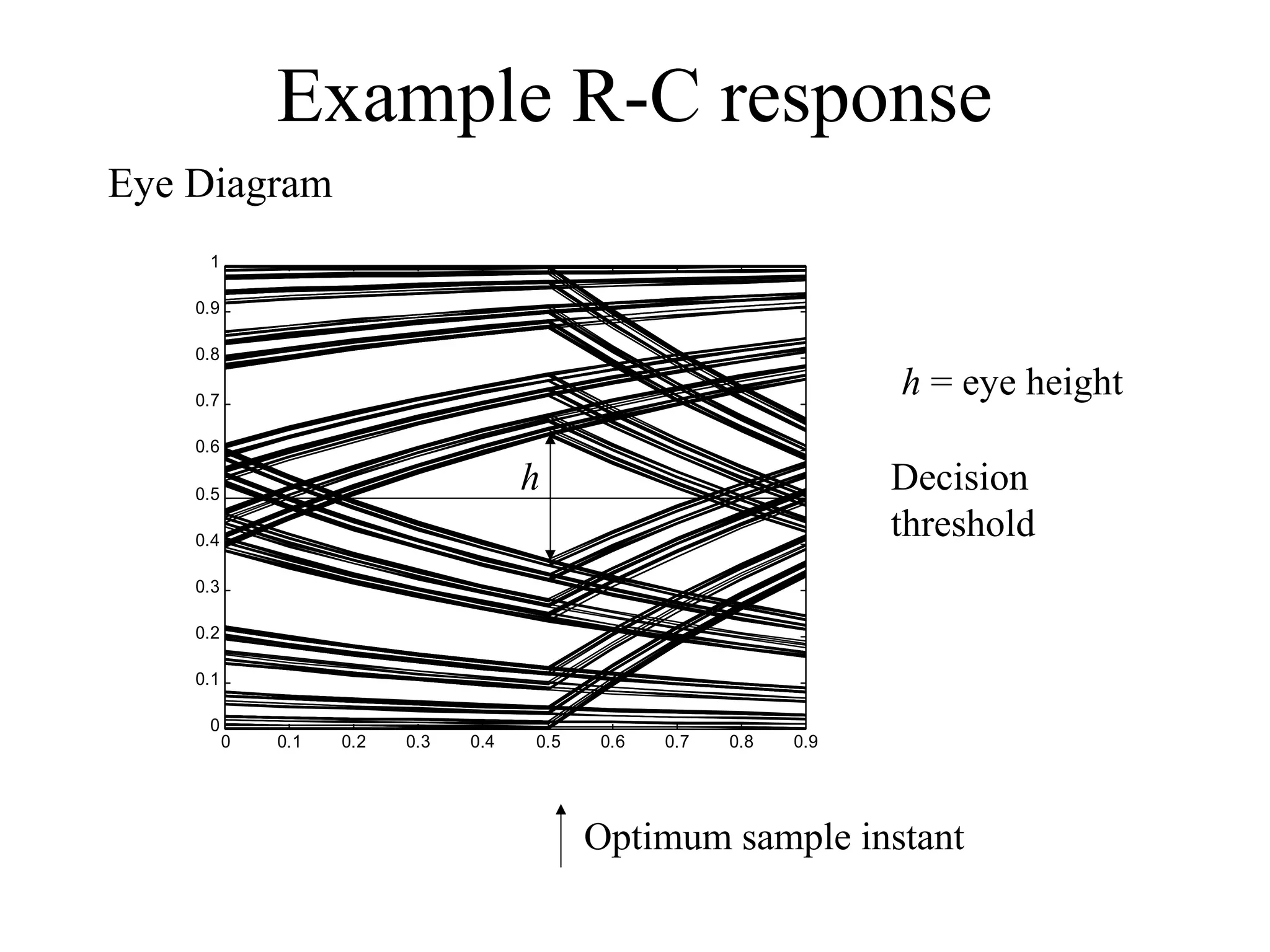
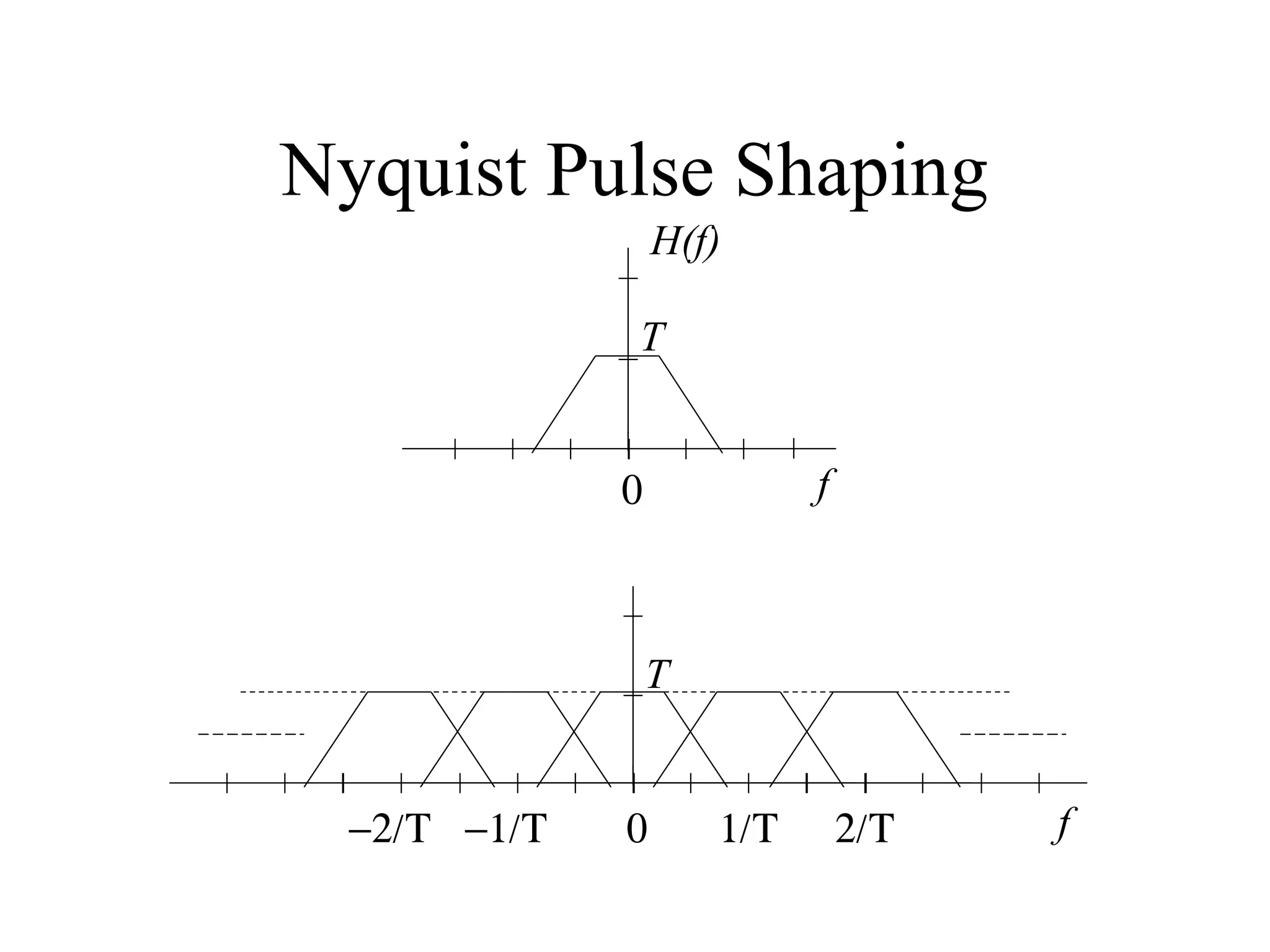
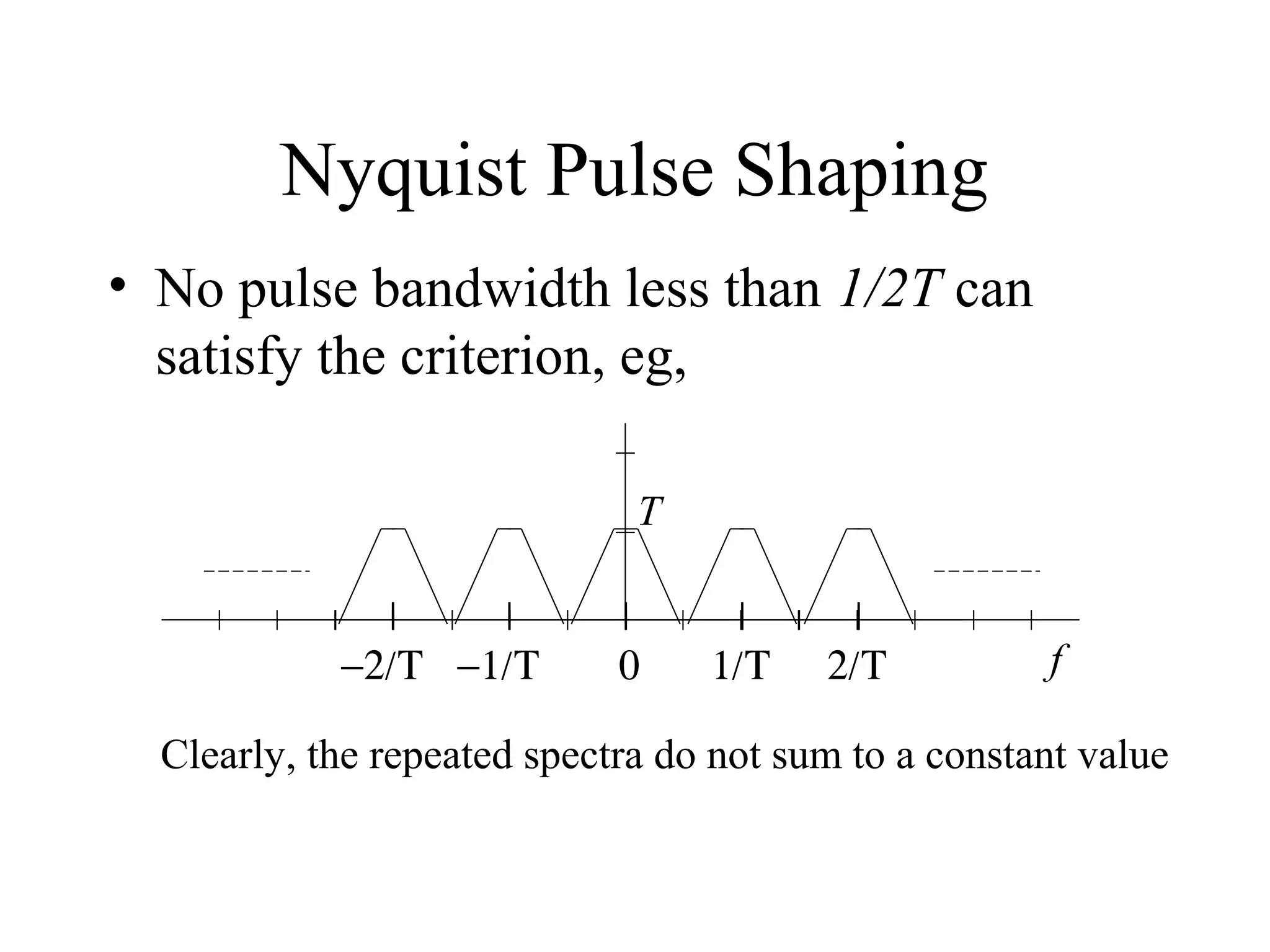
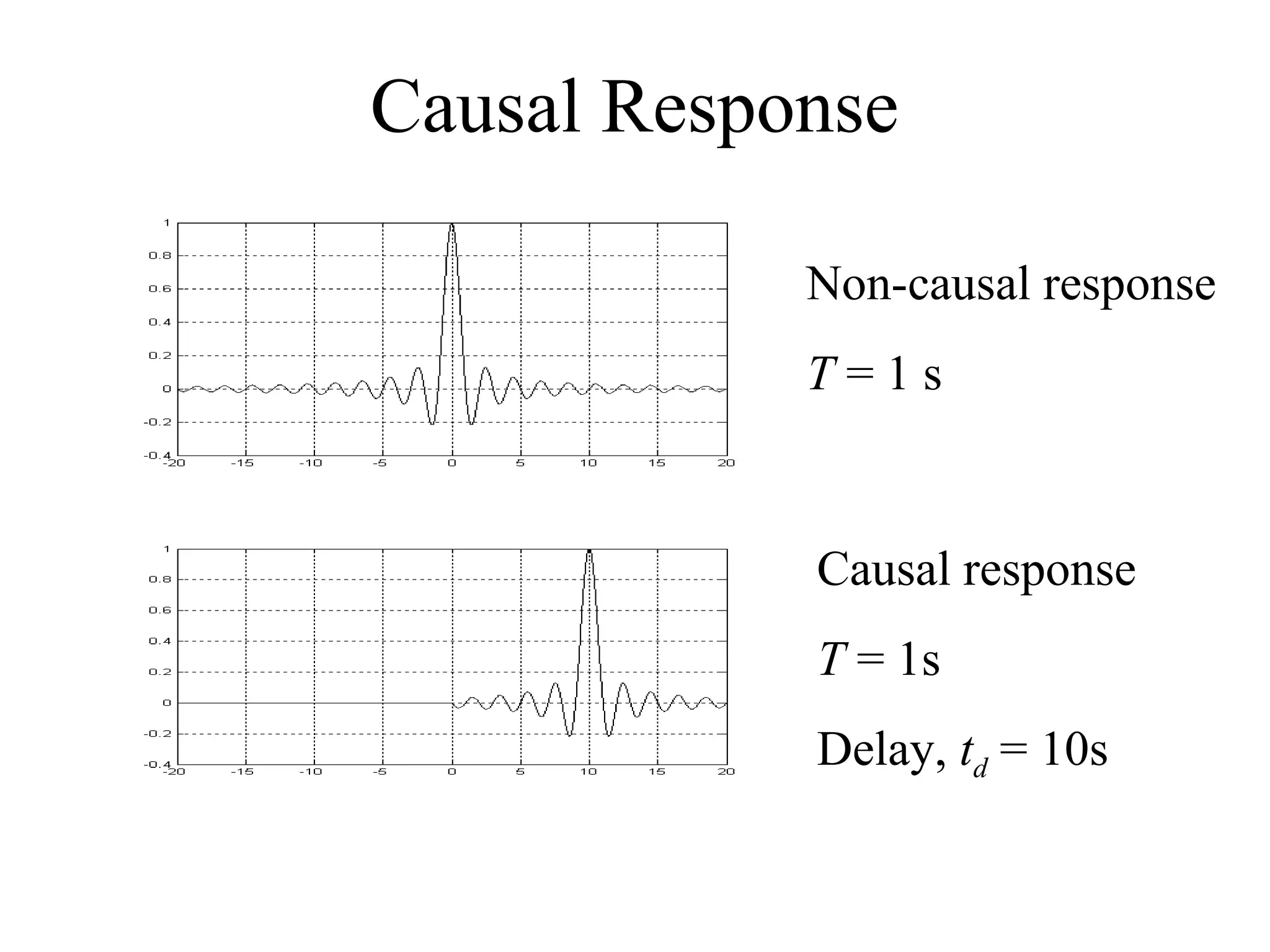
Impact of ISI on PAM signals, examples, and the role of timing and transitions in detection accuracy.Using eye diagrams to visualize ISI, assess performance and timing errors in PAM systems, and criteria for zero ISI.Nyquist pulse shaping concepts to eliminate ISI, requirements for received pulse shapes, and the importance of bandwidth.
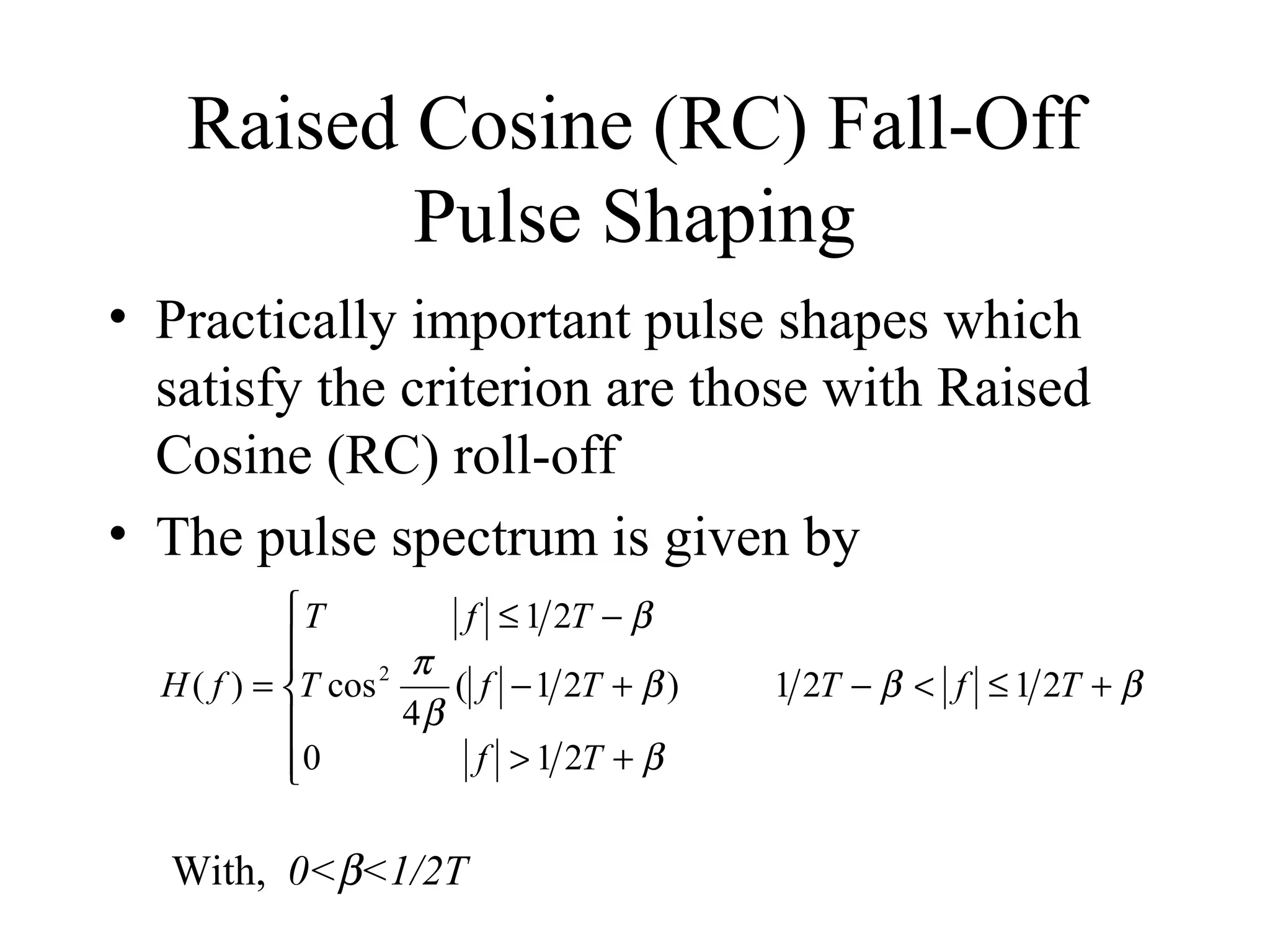
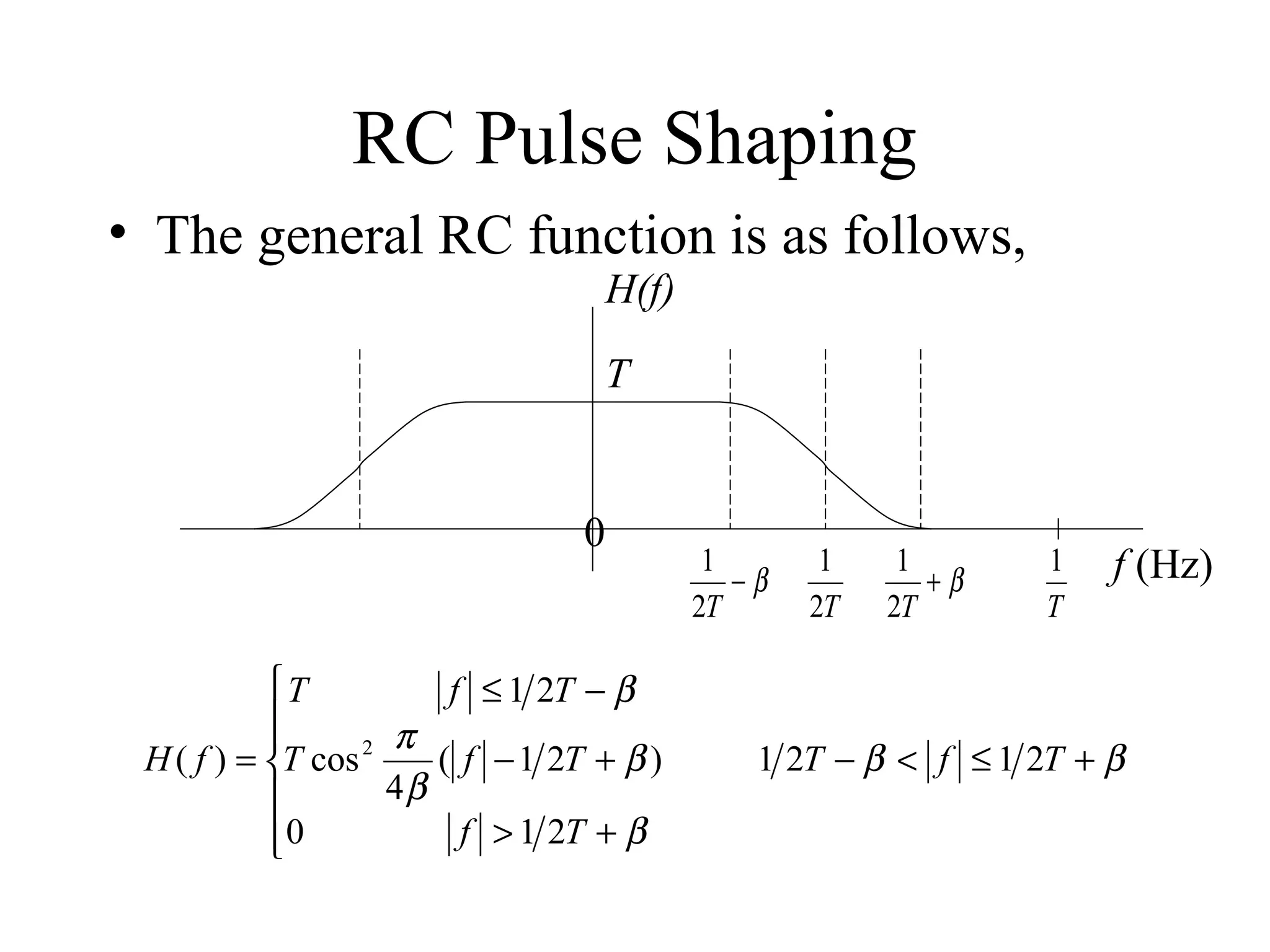
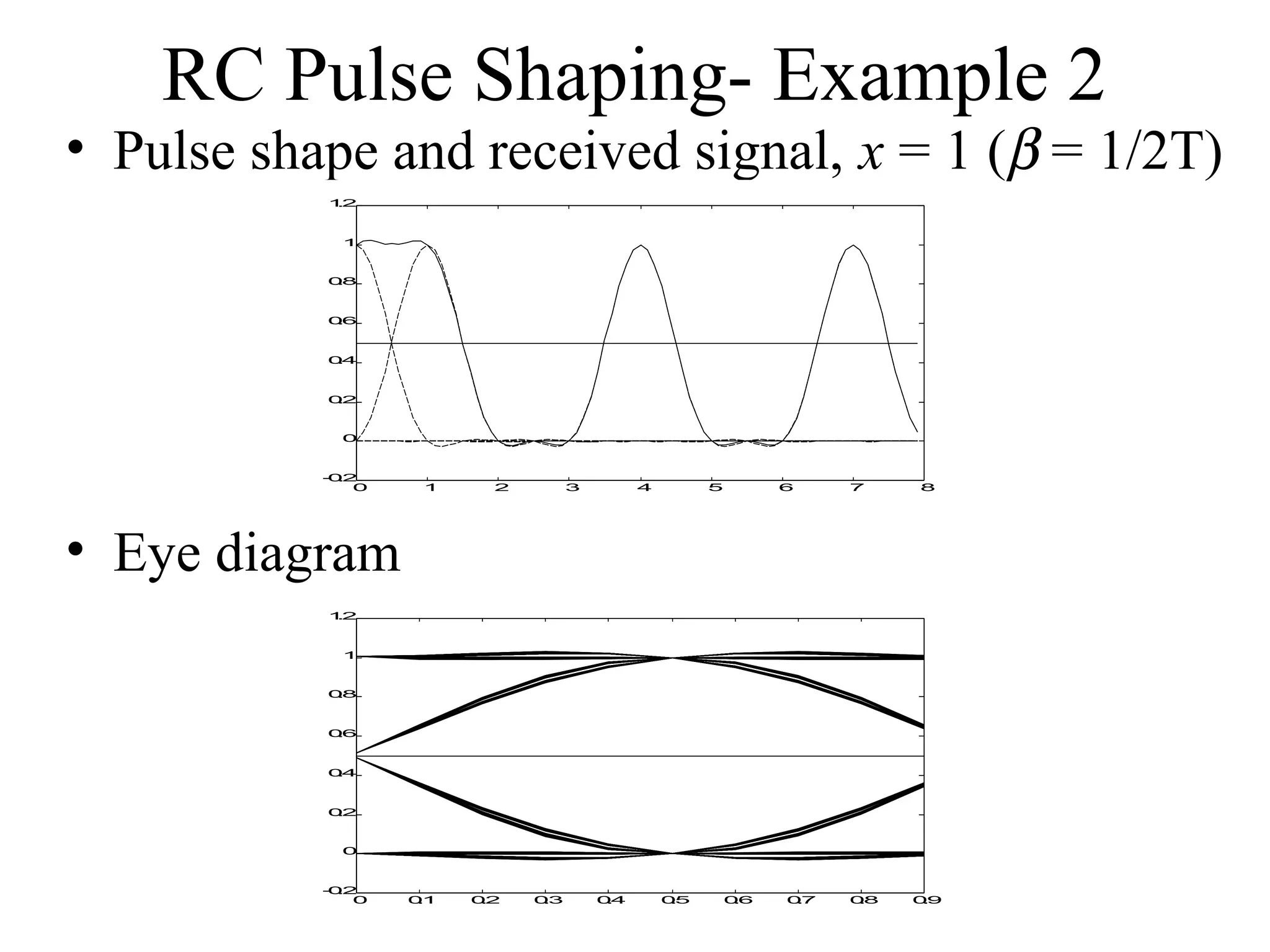
Specifics on Raised Cosine (RC) shaping, its impact on bandwidth versus pulse decay, and examples.
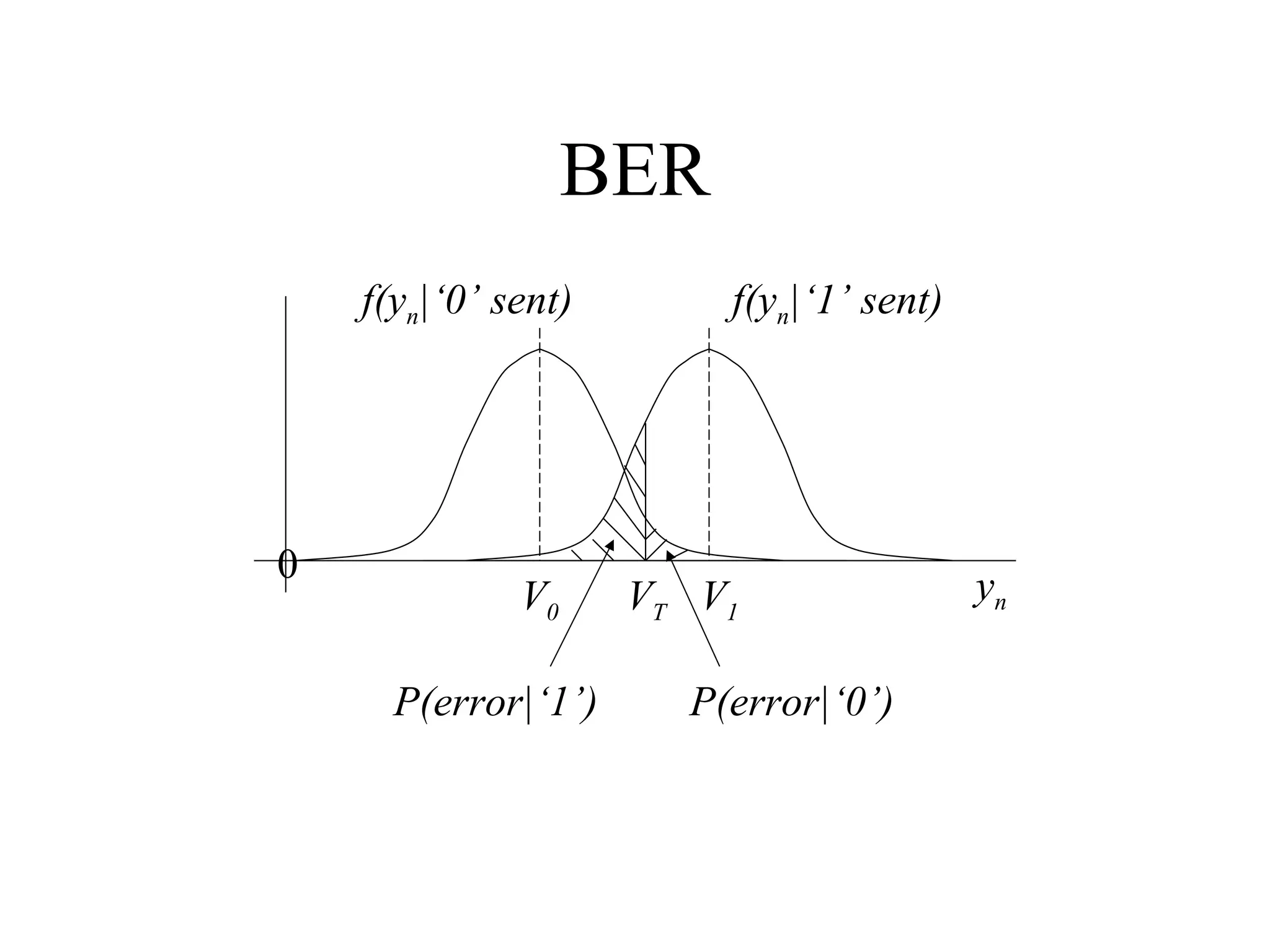
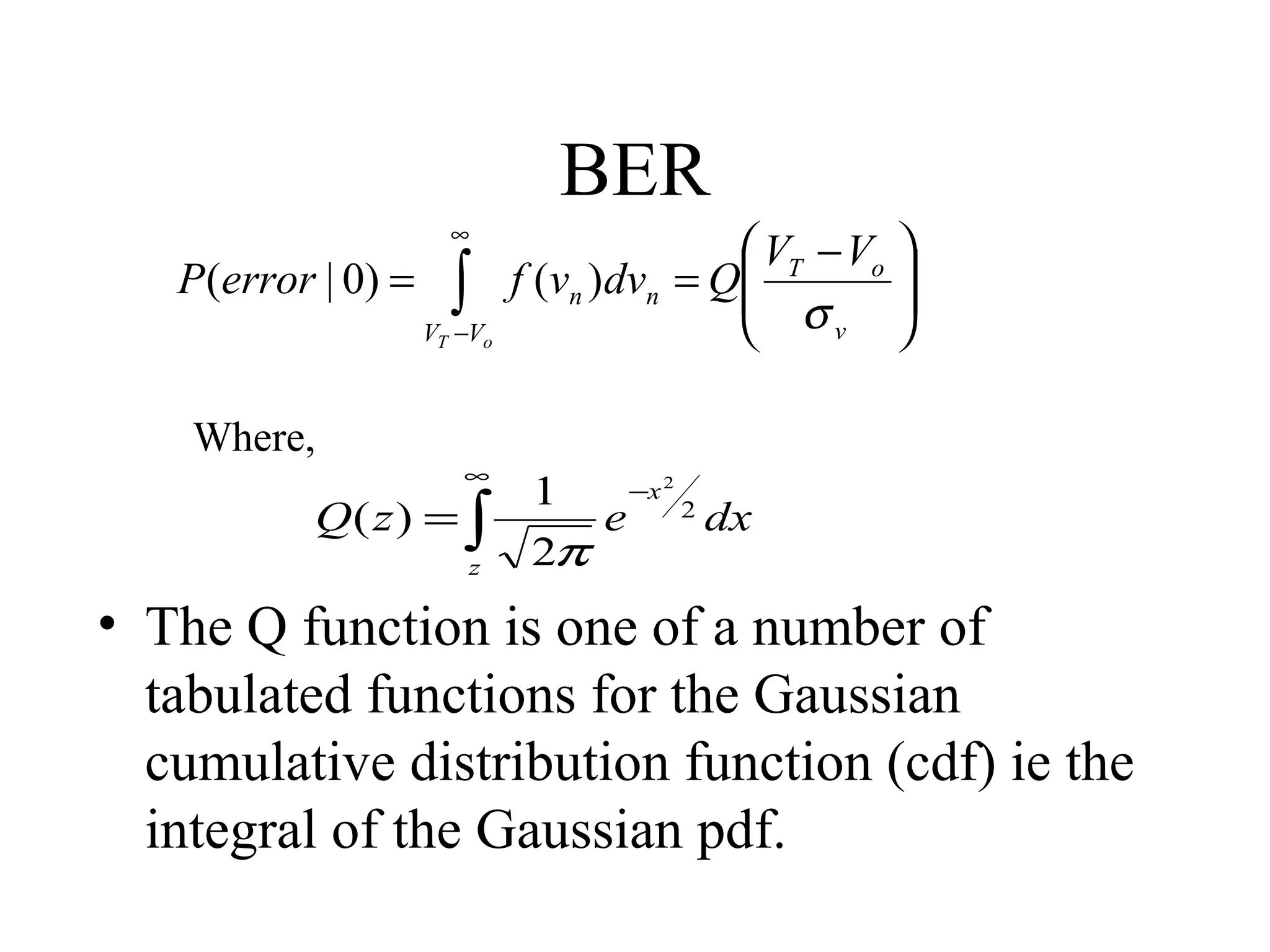
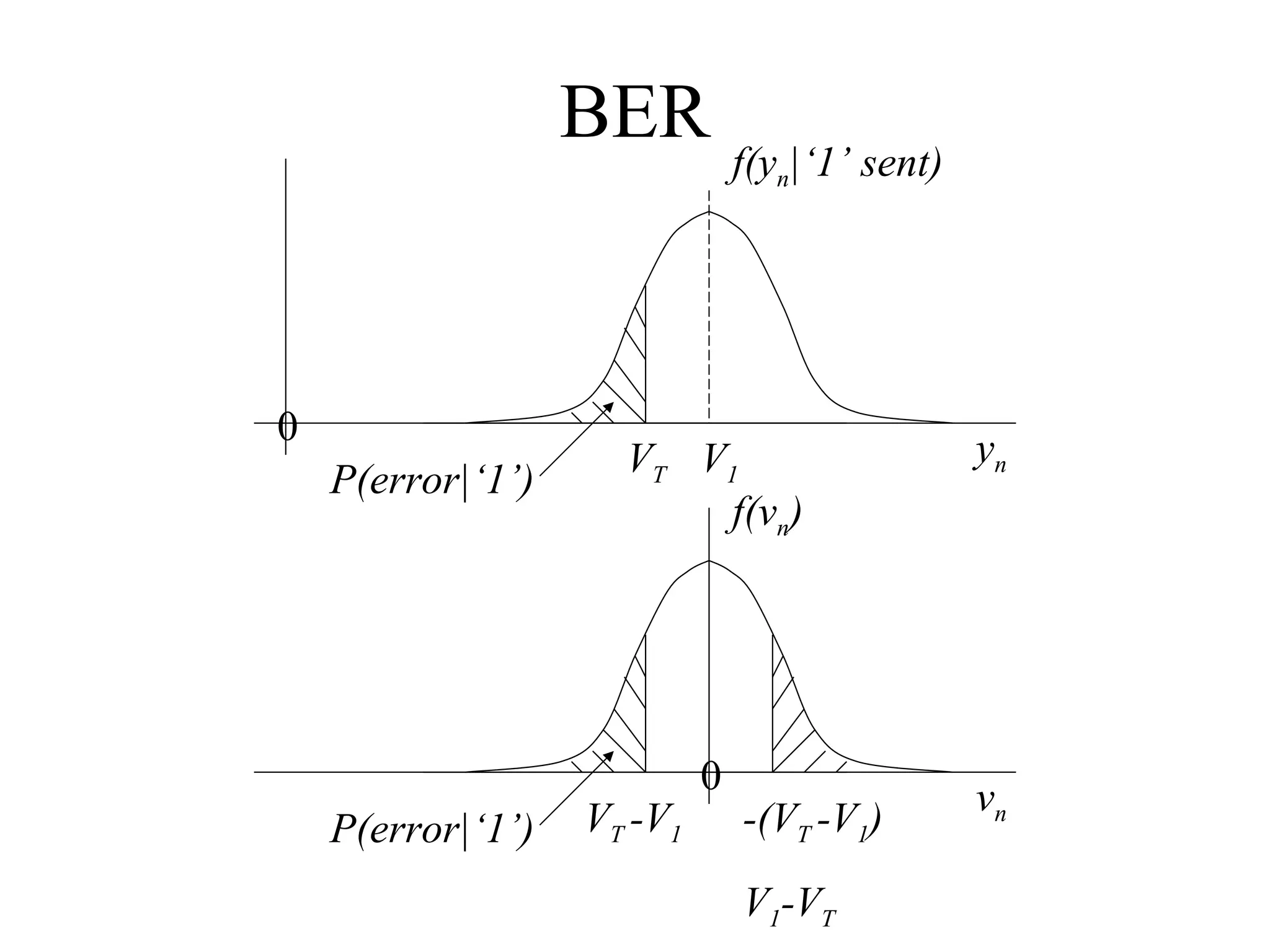
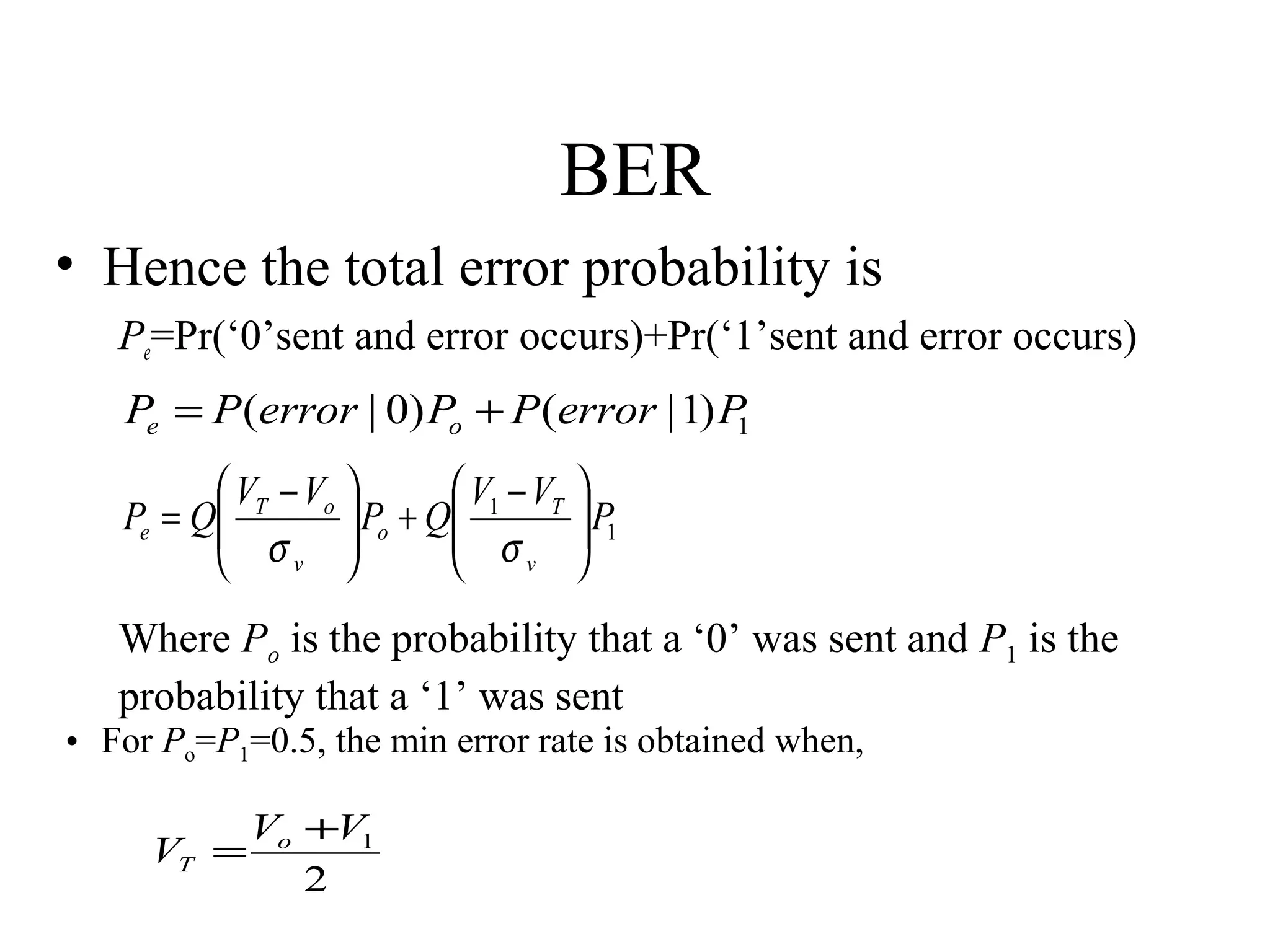
Evaluating probabilities of decision errors in PAM systems under Gaussian noise, defining bit error rate (BER).
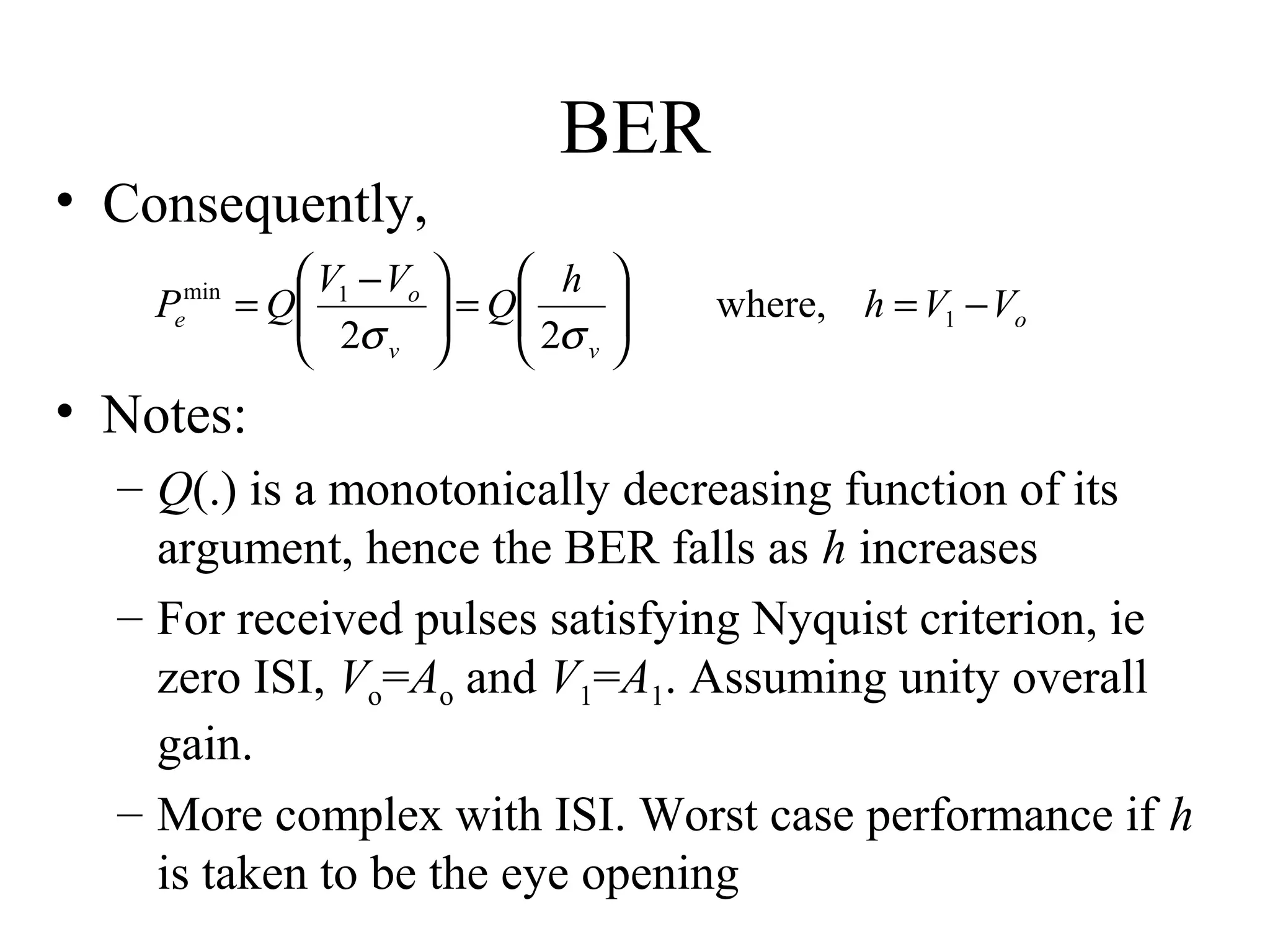
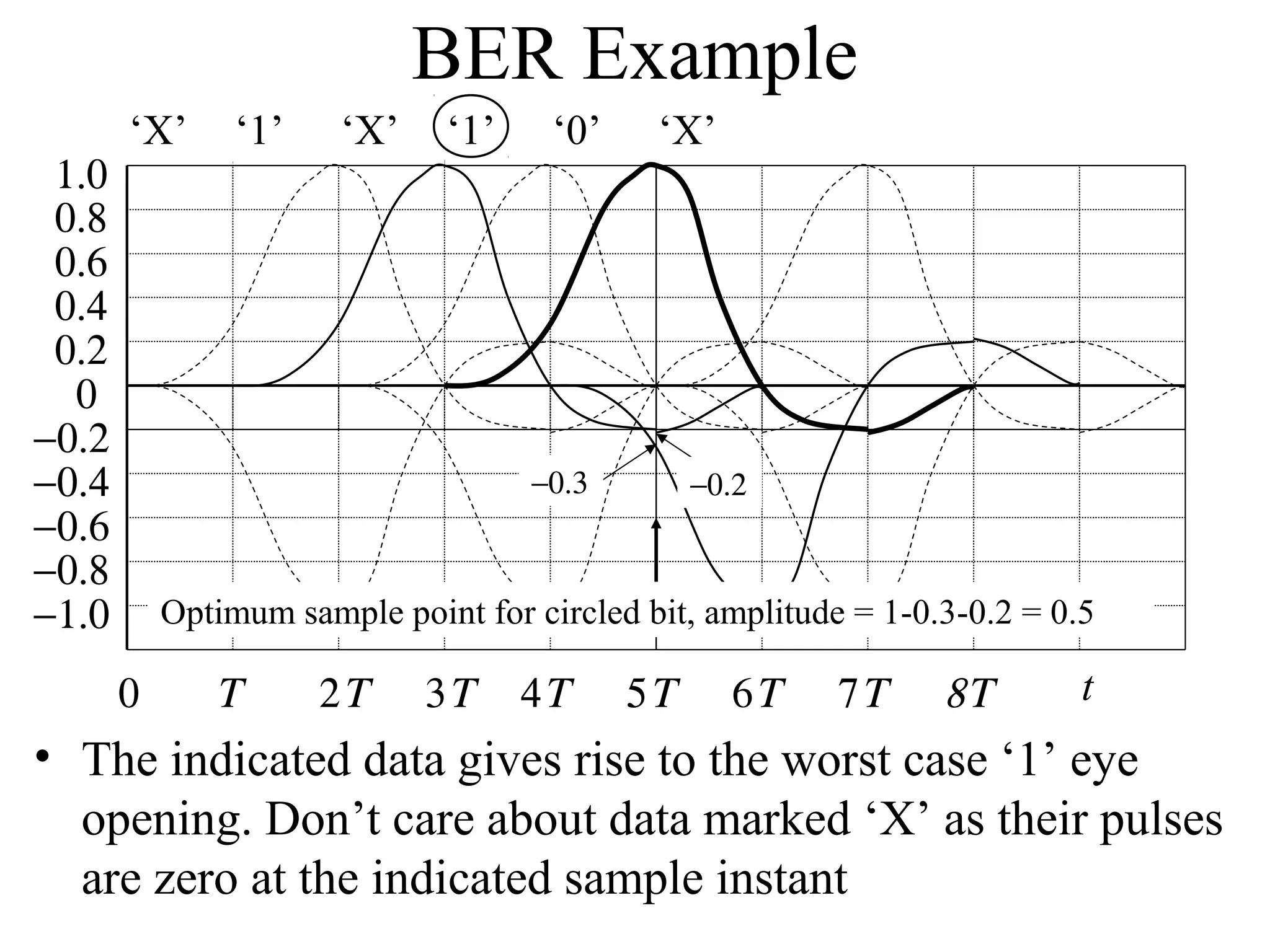
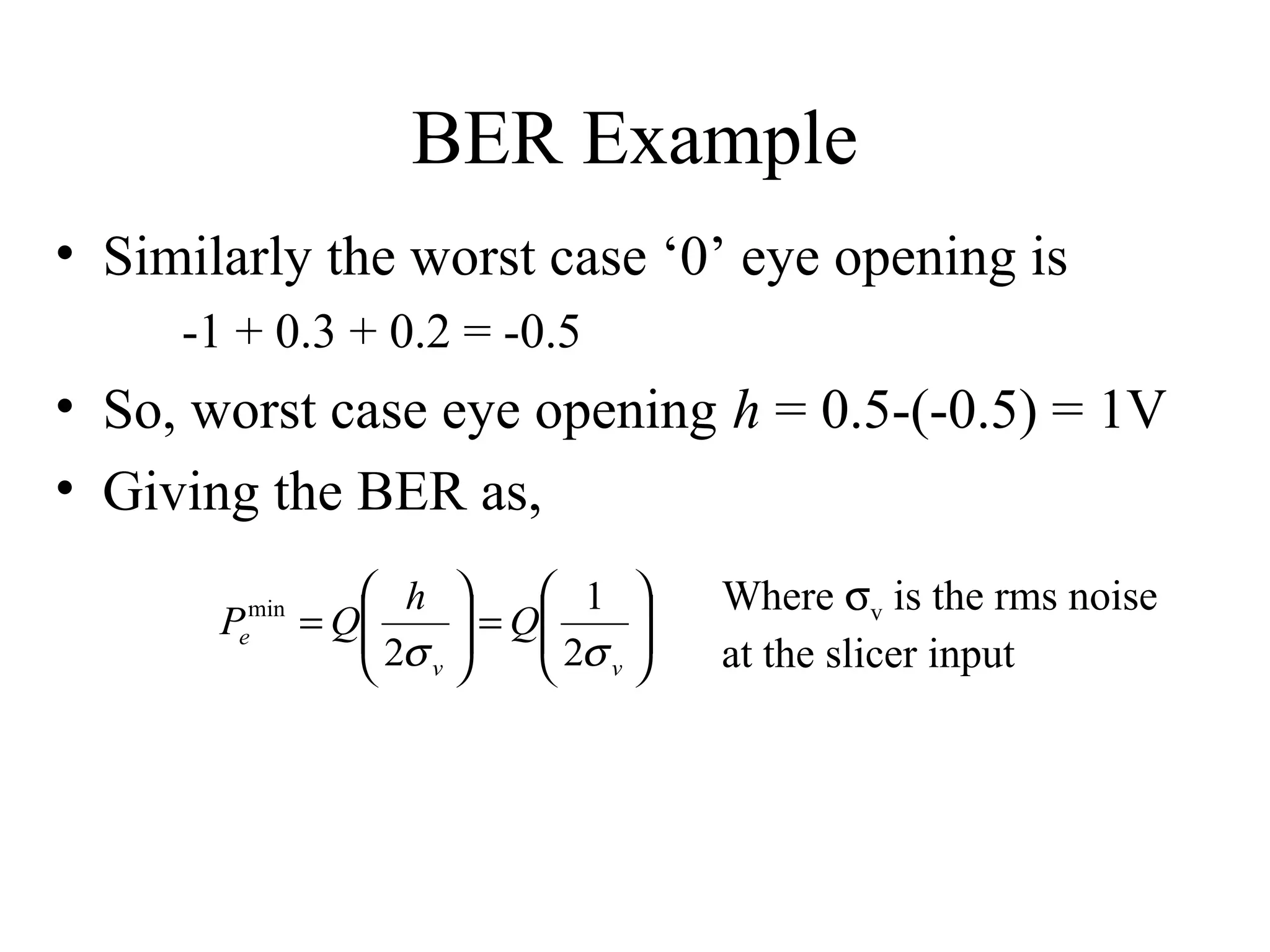
Demonstration of worst-case scenarios for BER in PAM systems, assessing eye open and error rates.