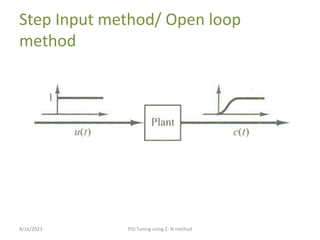
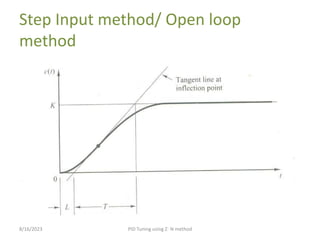
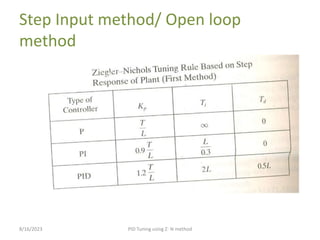
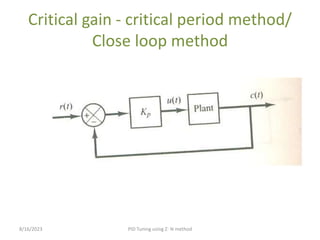
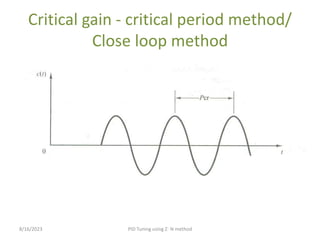
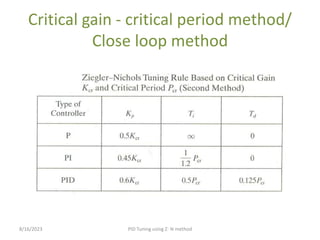
This document discusses two methods for PID tuning using the Ziegler-Nichols method: the step input or open loop method and the critical gain-critical period or closed loop method. The step input method analyzes the response of a plant to a step input to determine delay time and time constant. These values are then used to calculate PID parameters according to Ziegler-Nichols formulas. The critical gain-critical period method increases the proportional gain with the integral and derivative terms set to zero until sustained oscillations occur, allowing determination of critical gain and period to again calculate PID parameters.