The document discusses various greedy algorithms including knapsack problems, minimum spanning trees, shortest path algorithms, and job sequencing. It provides descriptions of greedy algorithms, examples to illustrate how they work, and pseudocode for algorithms like fractional knapsack, Prim's, Kruskal's, Dijkstra's, and job sequencing. Key aspects covered include choosing the best option at each step and building up an optimal solution incrementally using greedy choices.

![Control Abstraction of Greedy method
Control Abstraction of Greedy method
Algorithm Greedy(a,n)
{
a[n] //array a with n inputs
solution := 0 //initialize the solution
for i:=1 to n do
{
x = select (a)
if Feasible (solution, x) then
solution:=union(solution, x);
}
return solution;
}](https://image.slidesharecdn.com/unit3-greedymethod-230522172031-e2a00f92/75/Unit-3-Greedy-Method-pptx-6-2048.jpg)


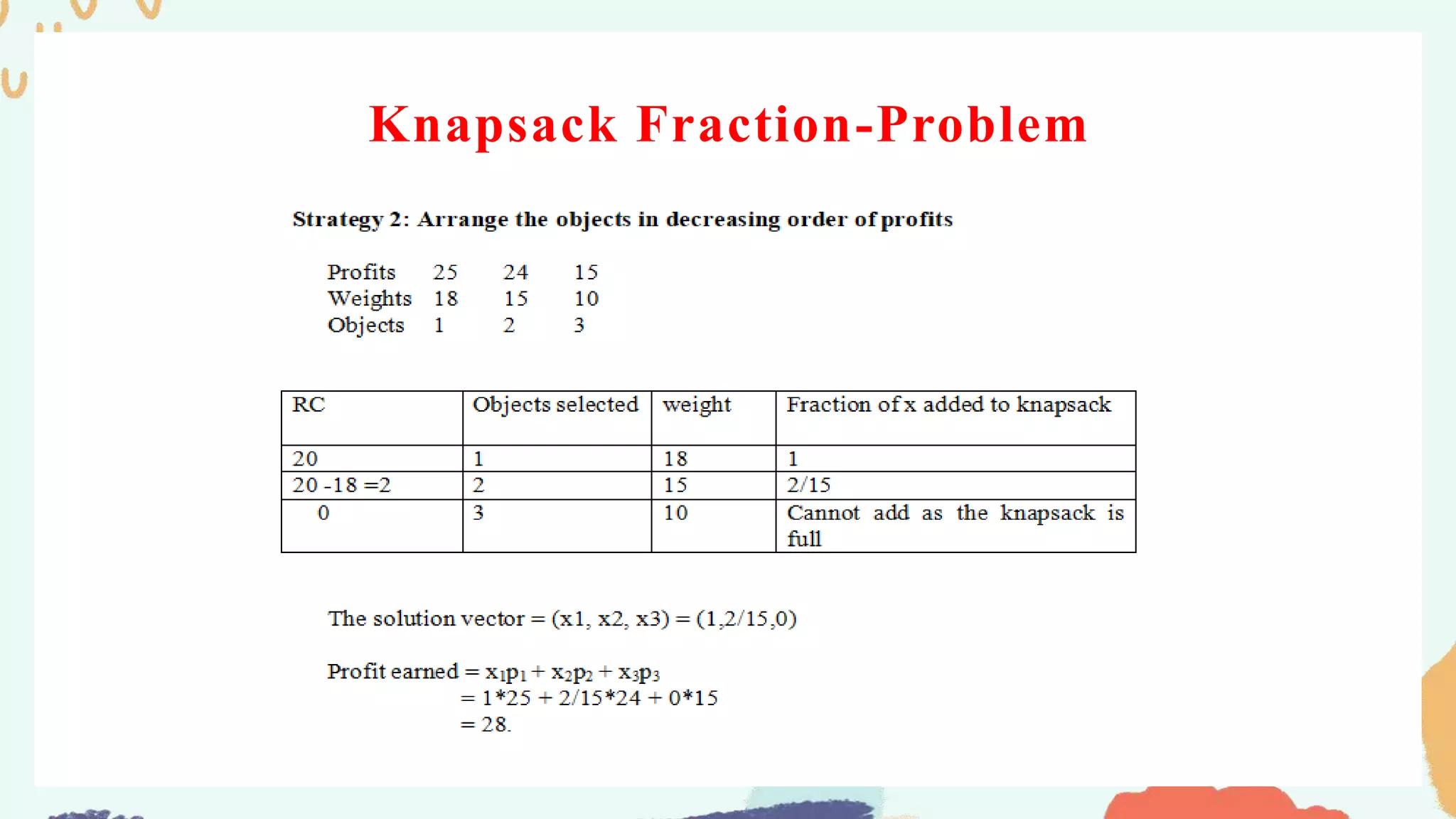
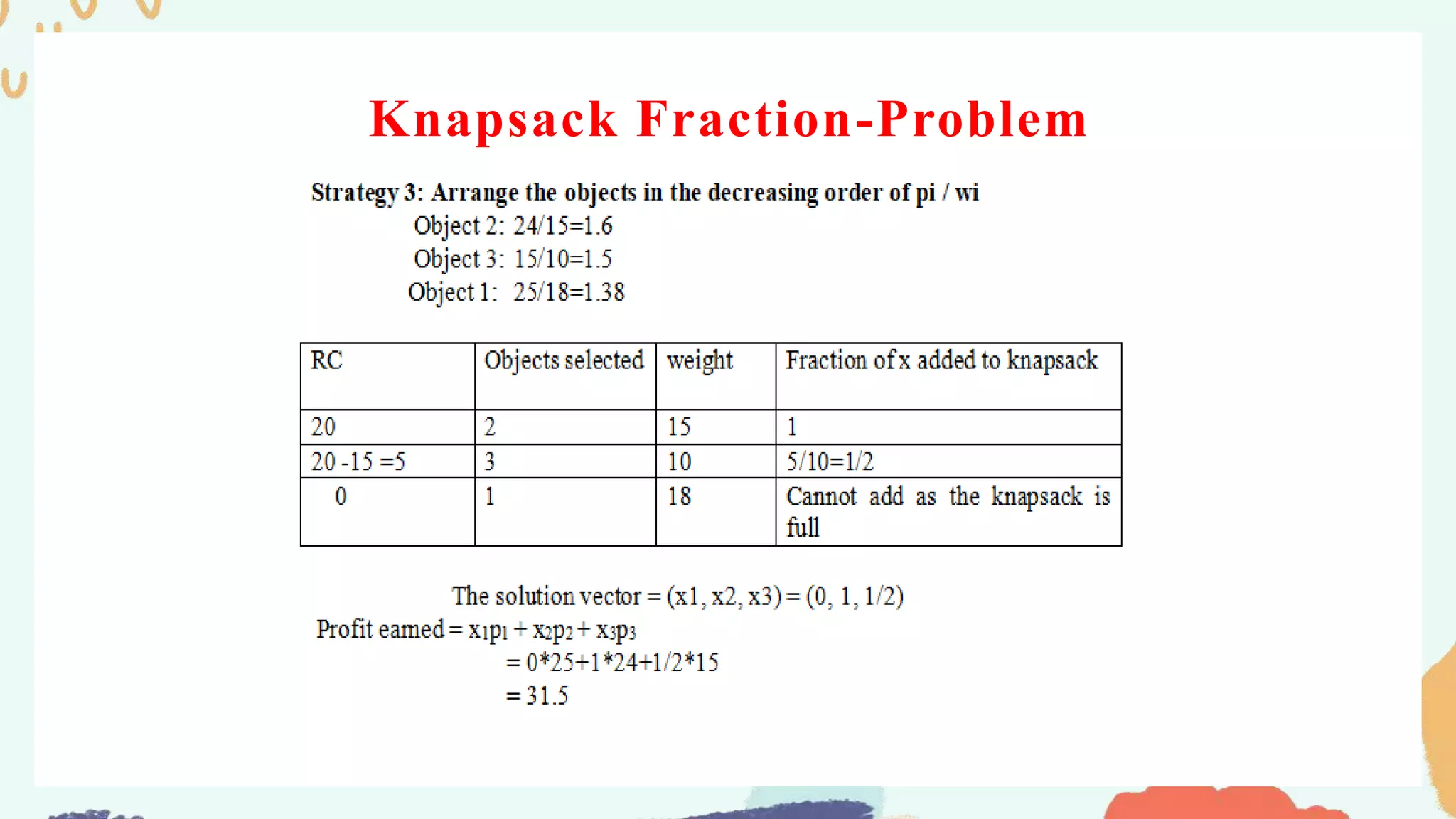

![Knapsack Fraction-Algorithm
Algorithm: Greedyknapsack fraction(M, n, w, P, x)
Assume the objects to be arranged in decreasing order of pi / wi. Let M be the knapsack capacity, n is the
number of edges, w [1 : n] is the array of weights, P[1 : n]is the array of profits ,x is a solution vector.
Step 1: Remaining capacity RC =m
Step 2: Repeat for i=1 to n do
x[i] = 0
end for
Step 3: Repeat for i==1 to n do
if (w[ i ] < RC)
x[ i ]=1
RC=RC-w[ i ]
Step 4: else
x[ i ]=RC/w[ i ]
break
End for
Step 5: For i=1 to n do
sum=sum+p [ i ]*x[ i ]
End for](https://image.slidesharecdn.com/unit3-greedymethod-230522172031-e2a00f92/75/Unit-3-Greedy-Method-pptx-14-2048.jpg)
![Knapsack 0/1-Algorithm
Algorithm: Greedyknapsack0/1(M, n, w, P, x)
Assume the objects to be arranged in decreasing order of pi / wi. Let M be the knapsack capacity, n is the
number of edges, w [1 : n] is the array of weights, P[1 : n]is the array of profits ,x is a solution vector.
Step 1: Remaining capacity RC =m
Step 2: Repeat for i=1 to n do
x[i] = 0
end for
Step 3: Repeat for i=1 to n do
if (w[ i ] < RC)
x[ i ]=1
RC=RC- w[ i ]
Step 4: else
x[ i ]= 0
break
End for
Step 5: For i=1 to n do
sum=sum+p [ i ]*x[ i ]
End for](https://image.slidesharecdn.com/unit3-greedymethod-230522172031-e2a00f92/75/Unit-3-Greedy-Method-pptx-15-2048.jpg)


![Prim’s algorithm
Algorithm :Prim’s(n, c)
//Assume G is connected, undirected and weighted graph.
//Input : The cost adjacency matrix C and number of vertices n.
//Output: Minimum weight spanning tree.
for i=1 to n do
visited [ i ]=0
u=1
visited [ u ] = 1
while( there is still an unchosen vertex ) do
Let <u, v> be the lightest edge between any chosen vertex u and unchosen vertex v
visited [ v ] =1
T=union (T, <u,v>)
end while
return T](https://image.slidesharecdn.com/unit3-greedymethod-230522172031-e2a00f92/75/Unit-3-Greedy-Method-pptx-20-2048.jpg)

![Algorithm-Dijikstra’s Single Source Shortest Path
dist[S] ← 0 // The distance to source vertex is set to 0
Π[S] ← NIL // The predecessor of source vertex is set as NIL
for all v ∈ V - {S} // For all other vertices
do dist[v] ← ∞ // All other distances are set to ∞
Π[v] ← NIL // The predecessor of all other vertices is set as NIL
S ← ∅ // The set of vertices that have been visited 'S' is
initially empty
Q ← V // The queue 'Q' initially contains all the vertices
while Q ≠ ∅ // While loop executes till the queue is not empty
do u ← mindistance (Q, dist) // A vertex from Q with the least distance is selected
S ← S ∪ {u} // Vertex 'u' is added to 'S' list of vertices that have
been visited
for all v ∈ neighbors[u] // For all the neighboring vertices of vertex 'u'
do if dist[v] > dist[u] + w(u,v) // if any new shortest path is discovered
then dist[v] ← dist[u] + w(u,v) // The new value of the shortest path is selected
return dist](https://image.slidesharecdn.com/unit3-greedymethod-230522172031-e2a00f92/75/Unit-3-Greedy-Method-pptx-24-2048.jpg)