Download to read offline


![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395 -0056
Volume: 04 Issue: 02 | Feb -2017 www.irjet.net p-ISSN: 2395-0072
© 2017, IRJET | Impact Factor value: 5.181 | ISO 9001:2008 Certified Journal | Page 961
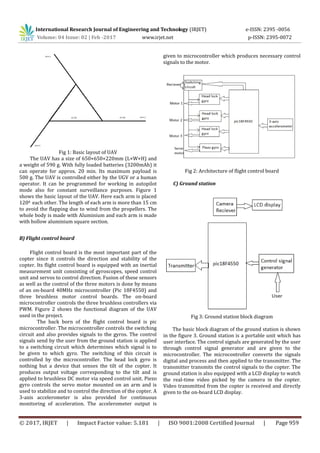
A) Transmitter
The transmitter consists of a control panel which acts
as an interface for the controller to control the UAV. The pic
18f4550 is used to generate the control signals. The control
signal transmitted is a signal of 50Hz frequency. The time
period of 20ms is divided into 4 slots of 5ms. The first slot
transmits the synchronizing bit which indicates the starting
of the 20ms cycle. The next three slots transmit the signal
to the three motors of arm1, arm2 and arm 3 respectively.
The last bit is used to control the servomotor.
The time duration of each bit is varied with respect to the
analog voltage signals from the control panel. The first bit
transmitted is a .5ms wide high pulse. It is used to indicate
the beginning of a 20ms cycle. The transmitted signal is
shown in the figure3 and is generated by the micro-
controller in the ground station based on the user input.
Fig 5: Control signals transmitted
The ground station board consists of variable resistors
which produces the analog voltage corresponding to the
variations in the resistance produced by the user. This
analog voltage is converted into digital form and the
appropriate control signals are generated by the micro-
controller.
V. CONCLUSION
In this paper we presented a Tri-rotor UAV which can be
used for remote aerial surveillance especially in military
applications. This device can be used for continuous
monitoring of a particular area. This Tri-rotor UAV has two
parts such as the copter and the ground station with user
interface to control the motion of the copter. Ground station
is a portable unit. The main advantages of this system are
vertical take-off and landing, maneuverability, low cost and
small size. The applications of the system are in remote
surveillance, in military field and for spy works etc. The
major problems of our Tri-rotor UAV is its battery back-up
and range of communication. We are planning to develop a
system with better battery back-up and range in future.
VI.REFERENCE
[1]. An approach to surveillance an area using swarm of
fixed
wing and quad-rotor unmanned aerial vehicles UAV(s) by
Aldo Jaimes, Srinath Kota, Jose Gomez Autonomous Control
Engineering Lab University of Texas at San Antonio San
Antonio, USA
[2]. A Testbed for Mini Quadrotor Unmanned Aerial
Vehicle with Protective Shroud by C. A. Patel, S. K. Rao, Dr.
B. J. Driessen Department of Mechanical Engineering,
Wichita State University, Wichita, Kansas 67260, U.S.A.
[3]. A Small Semi-Autonomous Rotary-Wing Unmanned Air
Vehicle (UAV) by Scott D. Hanford*, Lyle N. Long†, and
Joseph F. Horn. The Pennsylvania State University,
University Park, PA, 16802
[4]. Application of an Inertial Navigation System to the
Quad-rotor UAV using MEMS Sensors by Tin Thet Nwe,
Than Htike, Khine Myint Mon, Dr.Zaw Min Naing and
Dr.Yin Mon Myint.
[5]. Autonomous UAV Surveillance in Complex Urban
Environments by Eduard Semsch, Michal Jakob, Dusan
Pavlcek and Michal Pechoucek. Agent Technology
centre,Faculty of Electrical Engineering.
[6]. Comparing methods for UAV-based autonomous
surveillance By Michael Freed, Robert Harris, Michael
Shafto Submitted to the 2004 National Conference on
Artificial Intelligence](https://image.slidesharecdn.com/irjet-v4i2184-171117095204/85/Tri-Rotor-UAV-Stabilisation-and-Control-4-320.jpg)

This document summarizes a research project on developing a tri-rotor unmanned aerial vehicle (UAV) for remote aerial surveillance. The project involves designing a tri-rotor UAV with vertical take-off and landing capability along with a control system to stabilize and direct its flight. A wireless camera attached to the UAV transmits live video to a ground station for monitoring purposes. The ground station allows an operator to view the video and generate control signals to adjust the camera position and direct the UAV's path of flight. The document describes the hardware components of the UAV and ground station as well as the communication system and flight control algorithms used to control the tri-rotor UAV.























































































