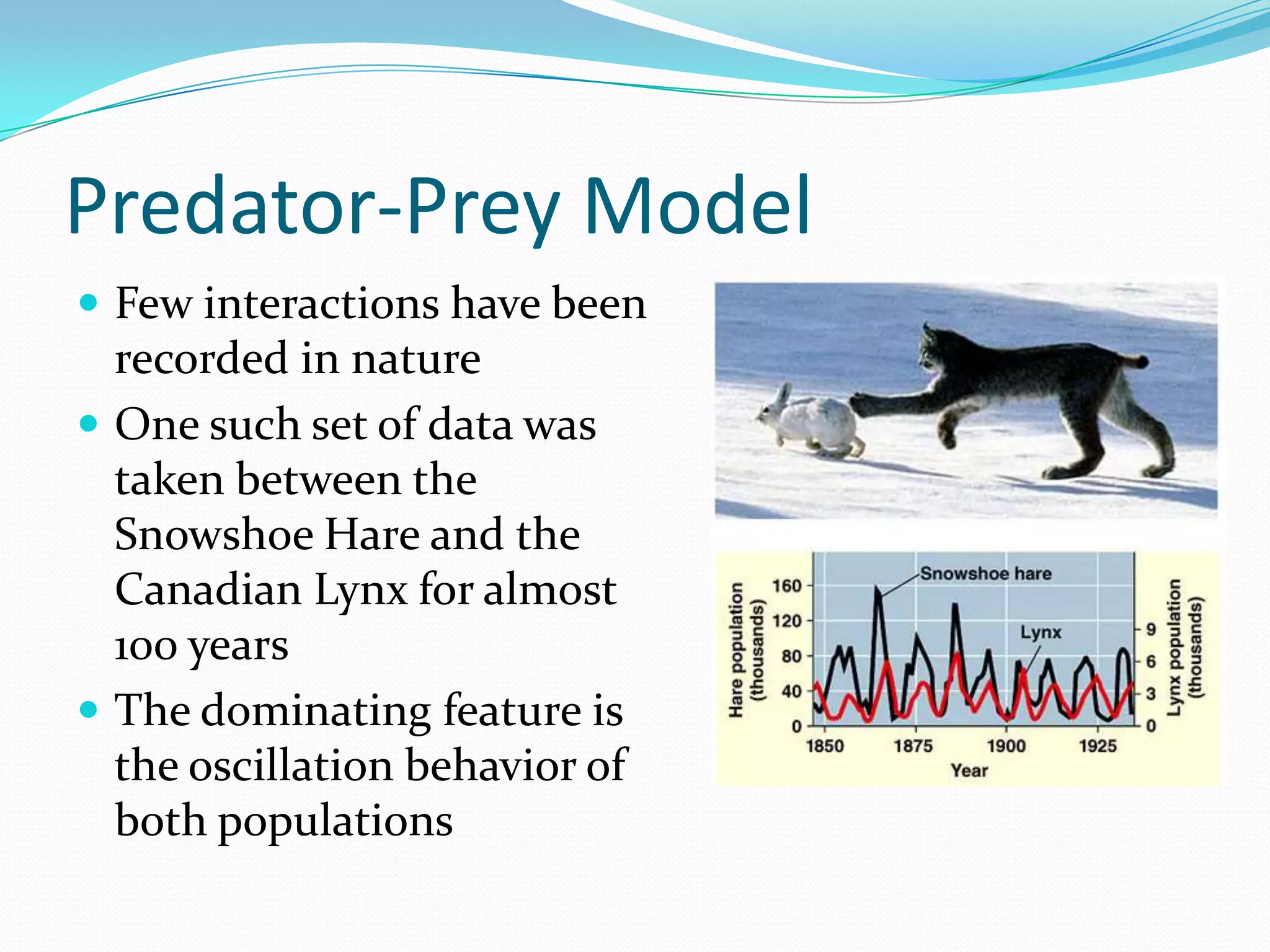
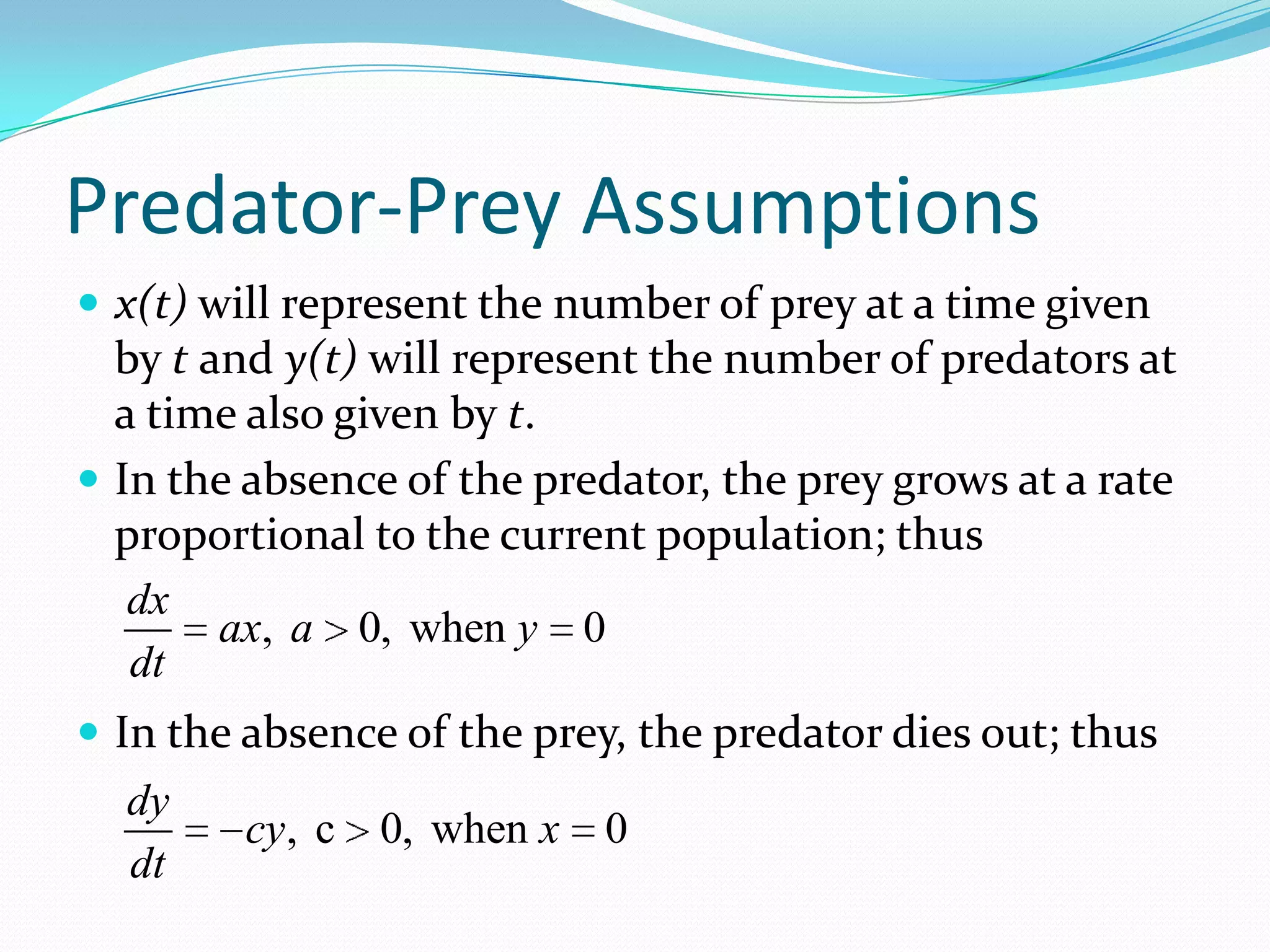
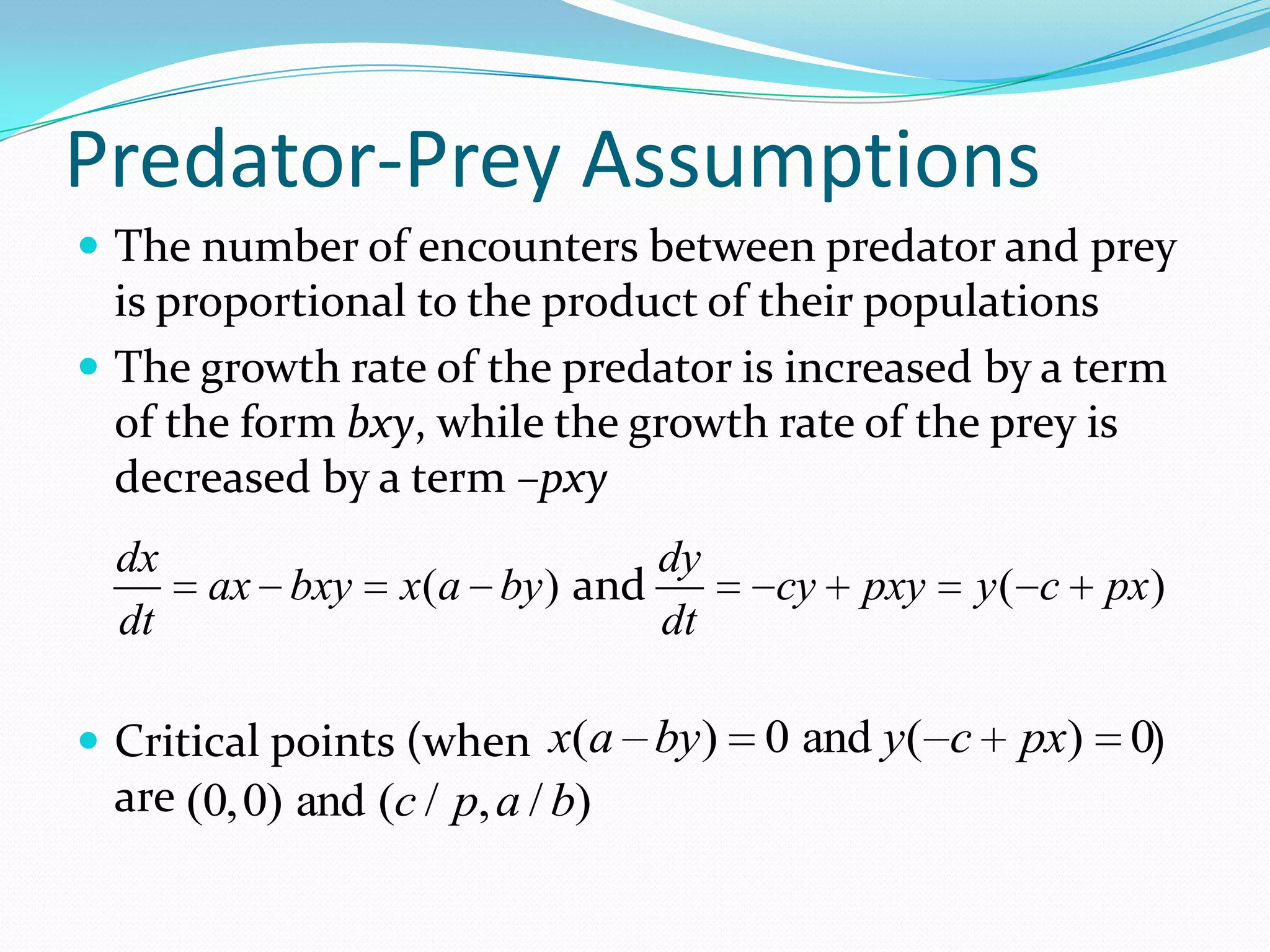
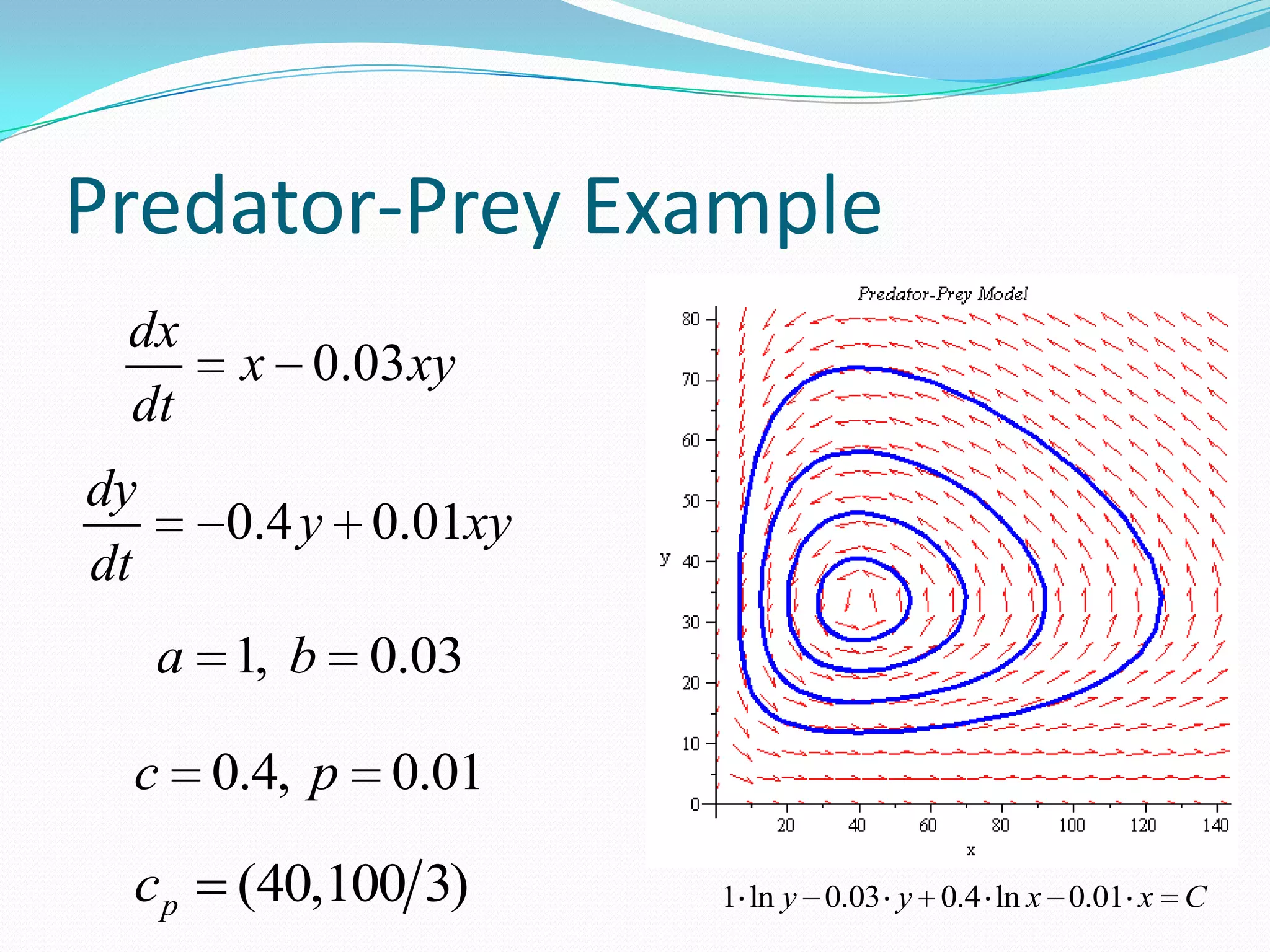
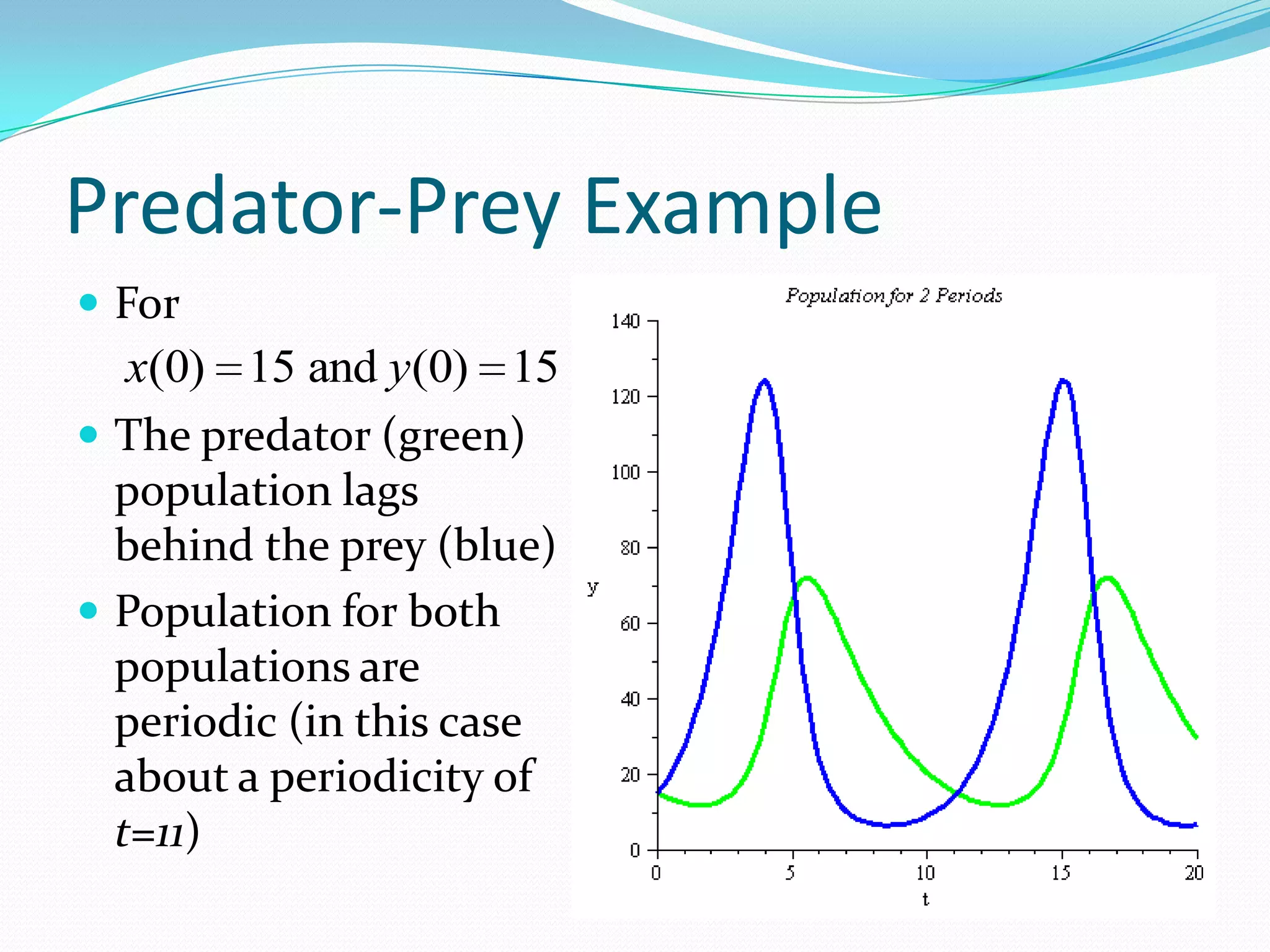
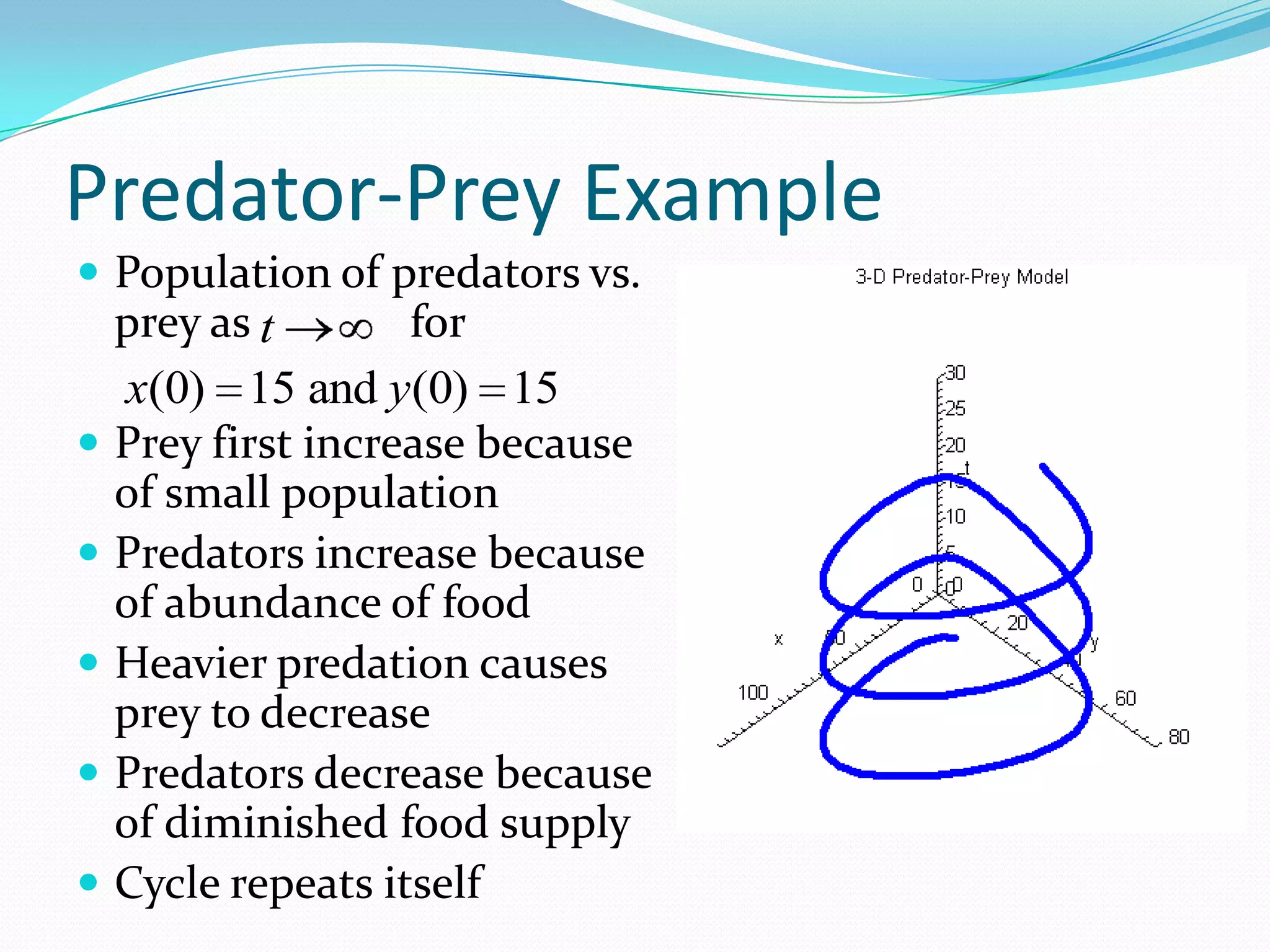
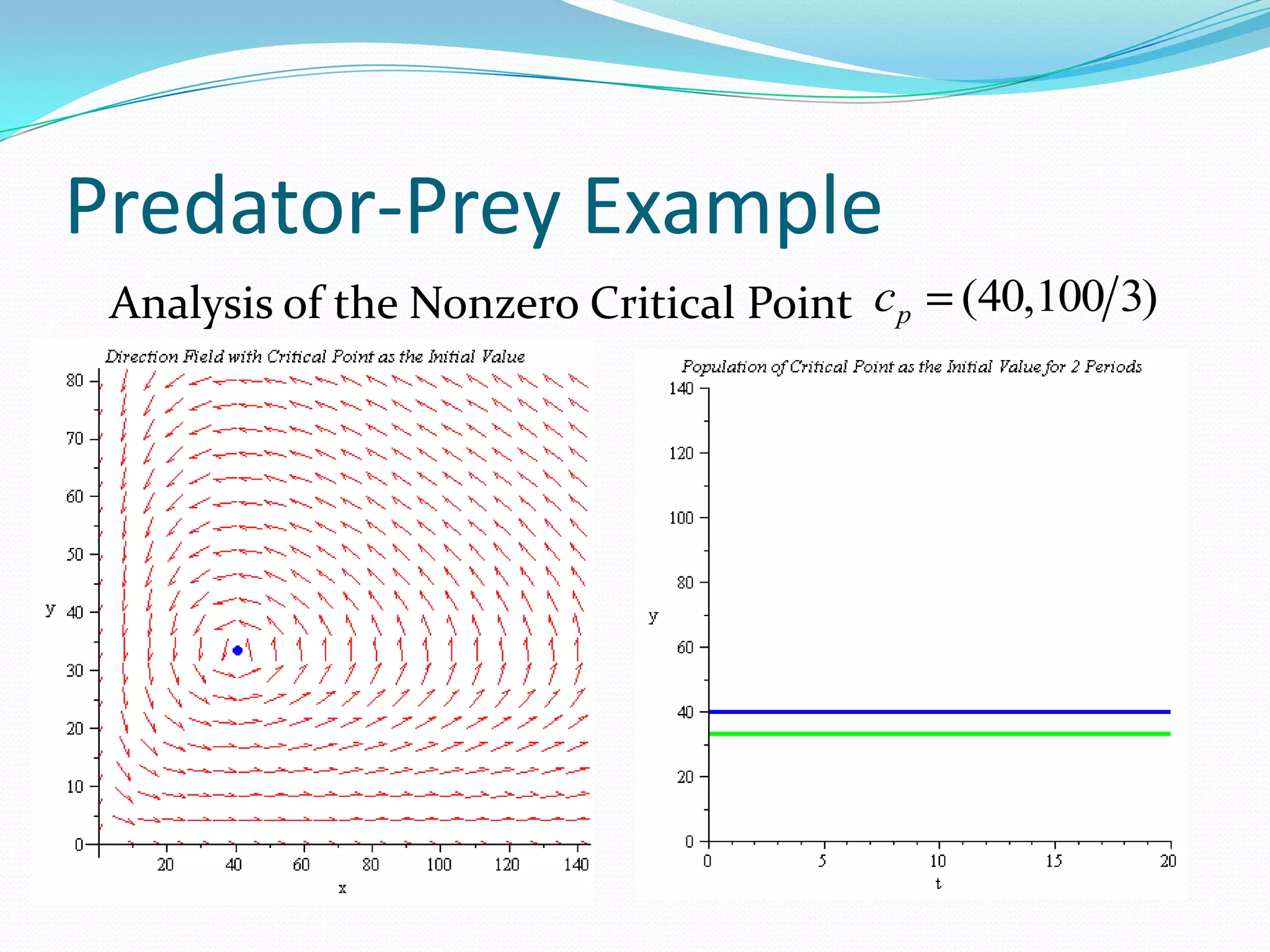
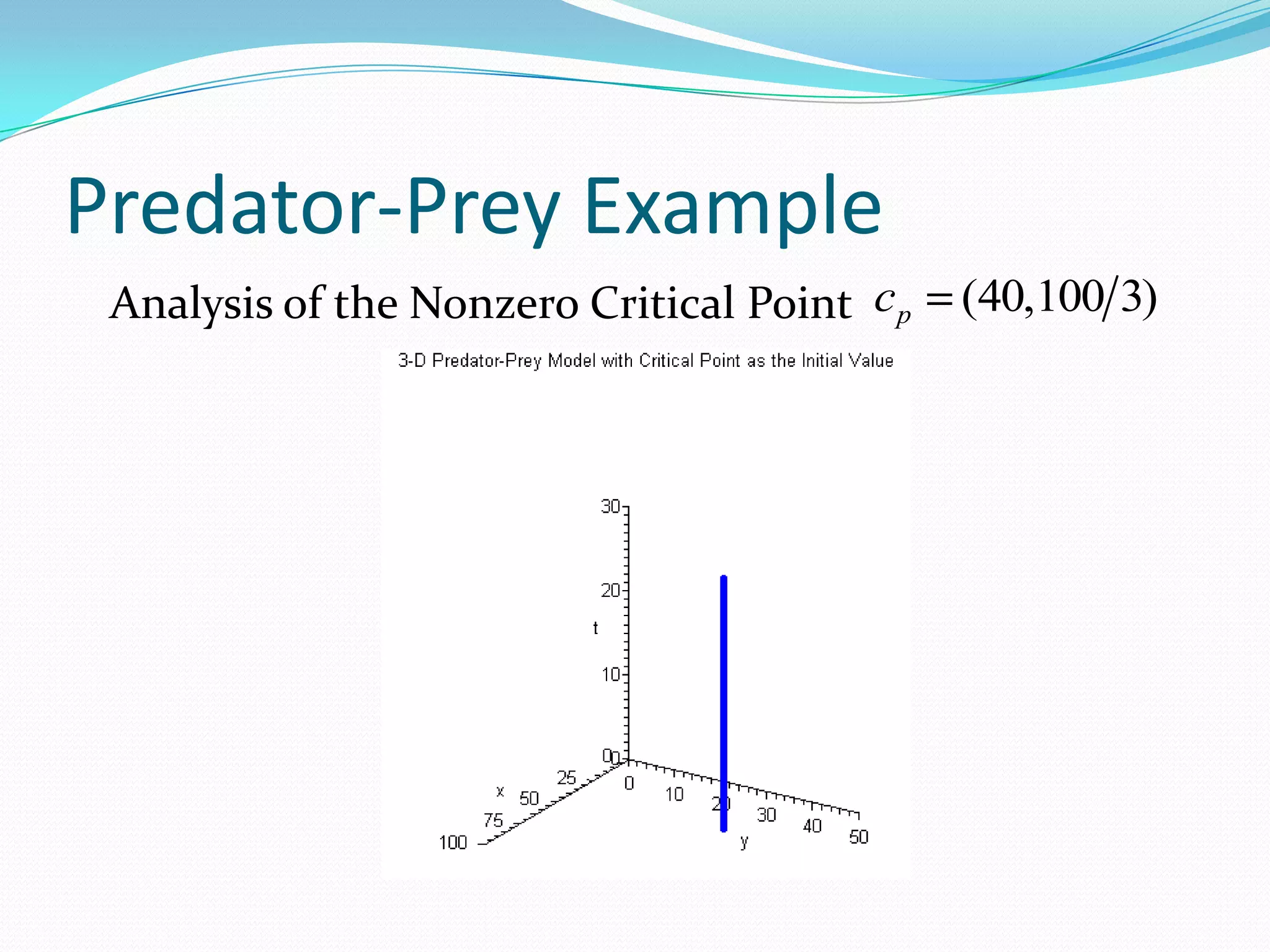
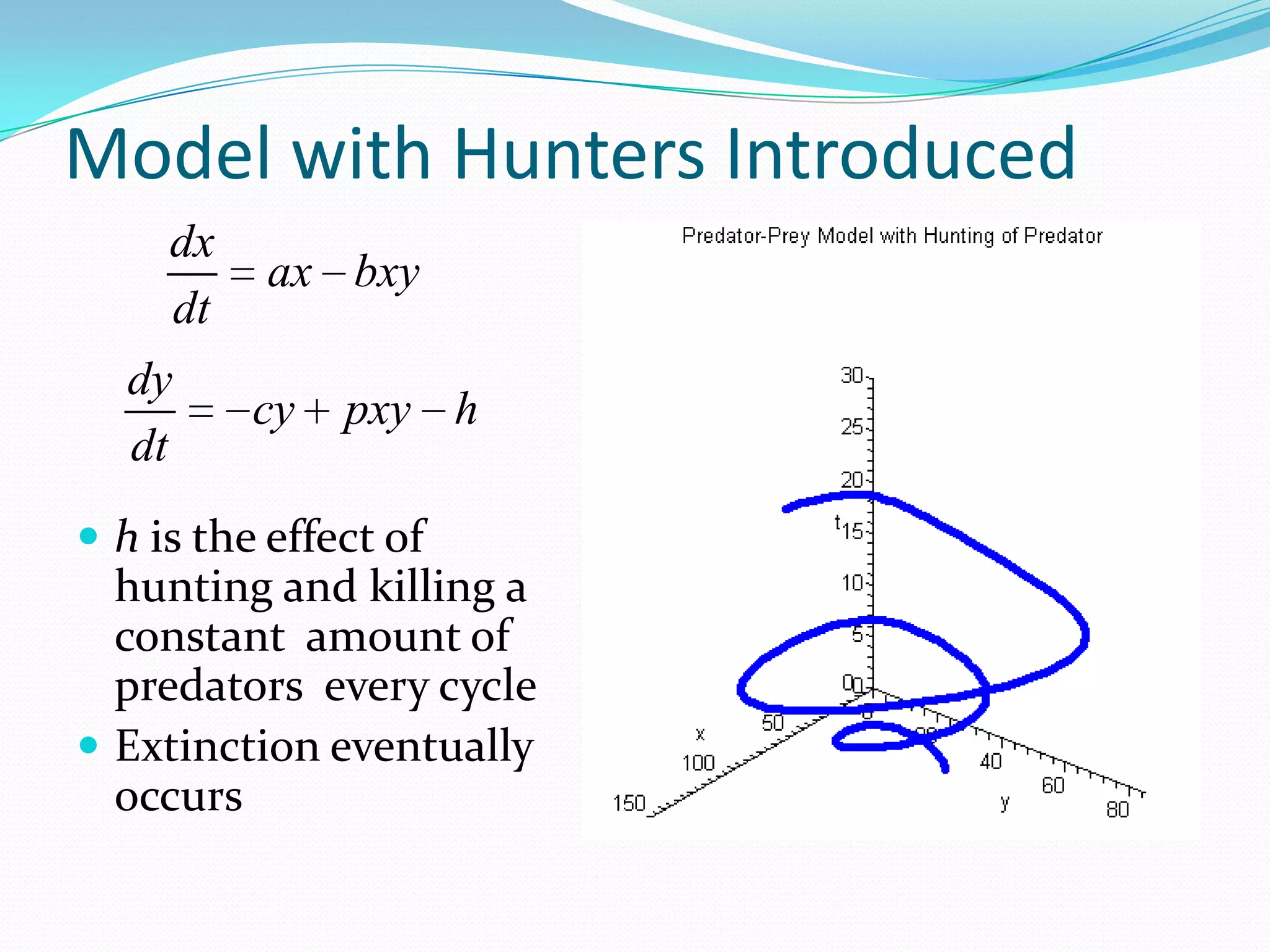
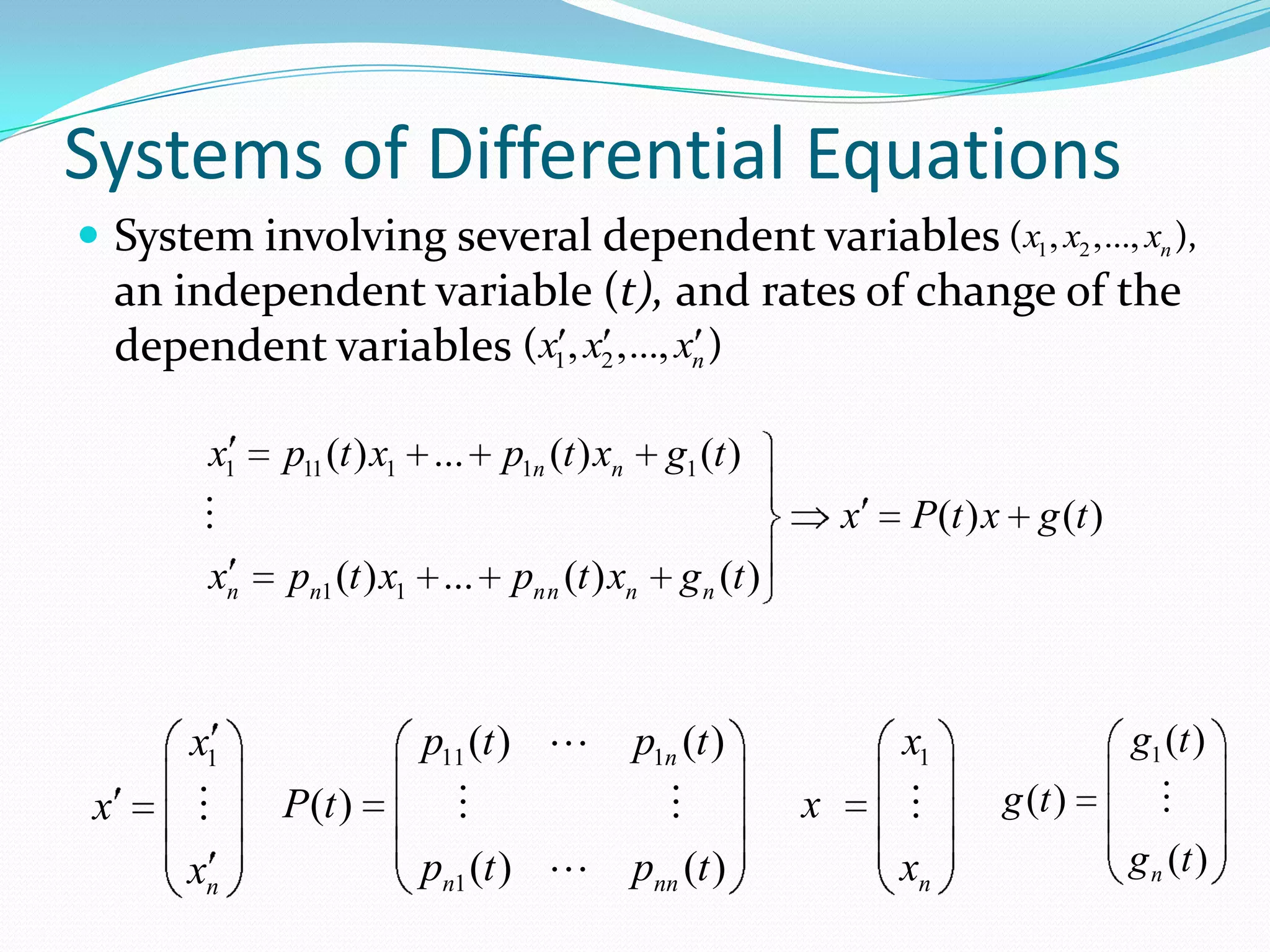
The document discusses systems of differential equations with multiple dependent variables and their solutions, including the use of eigenvalues and eigenvectors. It specifically explains the predator-prey model (Lotka-Volterra), which examines population dynamics and interactions between species, highlighting critical points and periodic behaviors. The analysis also introduces modifications for hunting effects on predator populations, leading to eventual extinction scenarios.
![Solutions to the System
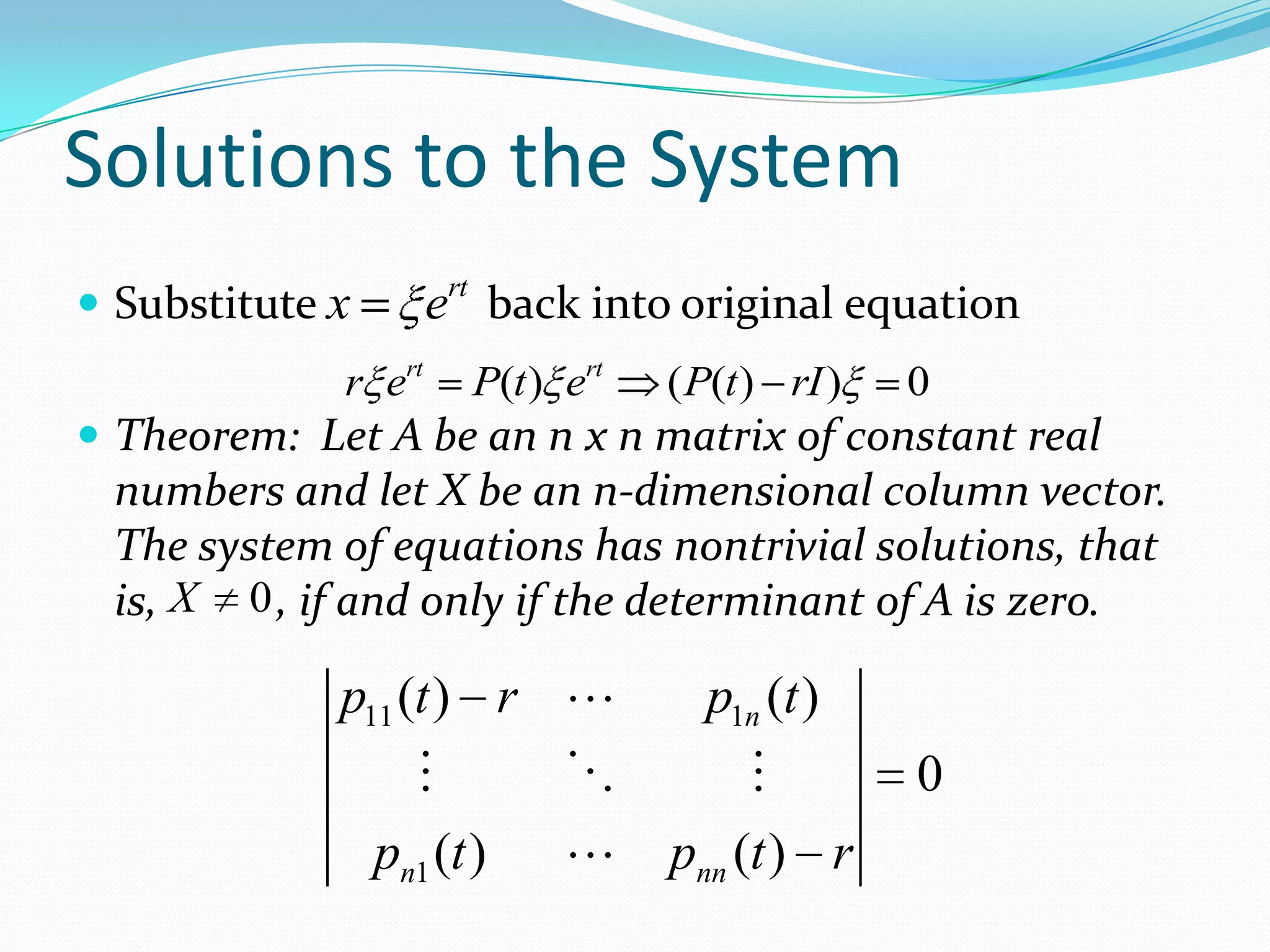
Solving the determinant gives the characteristic eqn.
a0r n a1r n 1 ... an 1r an 0
The roots , r, are the Eigenvalues r1 ,..., rn .
Eigenvalues are used to solve for the associated
Eigenvectors, 1 ,..., n , and the specific solutions
n rnt
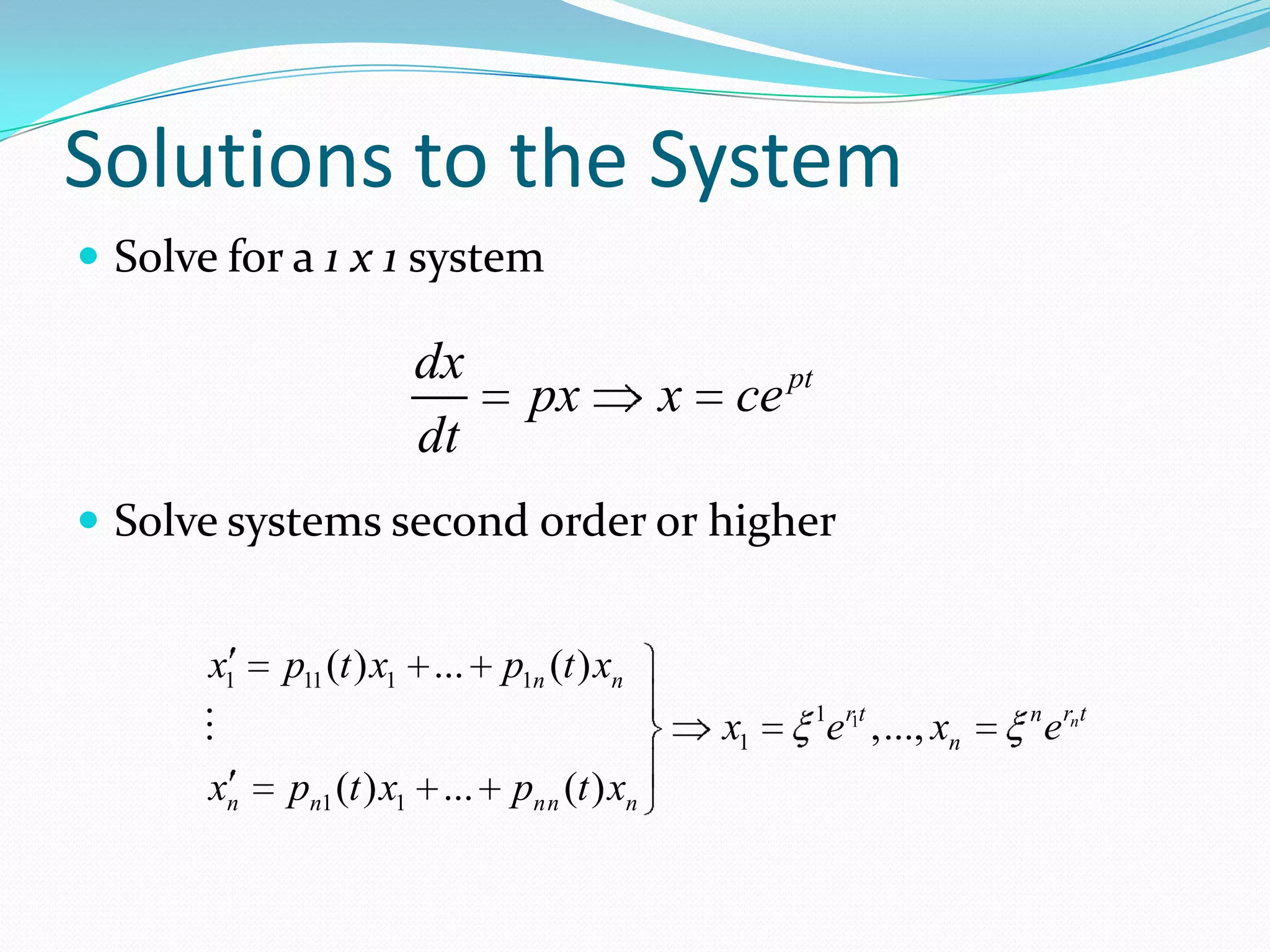
x(1) (t ) 1er1t ,..., x( n) (t ) e
Specific solutions as a general solution
(1) (k ) (1) ( n)
x c1x (t ) ck x (t ) if W[ x ,..., x ] 0](https://image.slidesharecdn.com/systemsofdifferentialequations-13262415361013-phpapp02-120110182839-phpapp02/75/Systems-Of-Differential-Equations-5-2048.jpg)