Downloaded 138 times

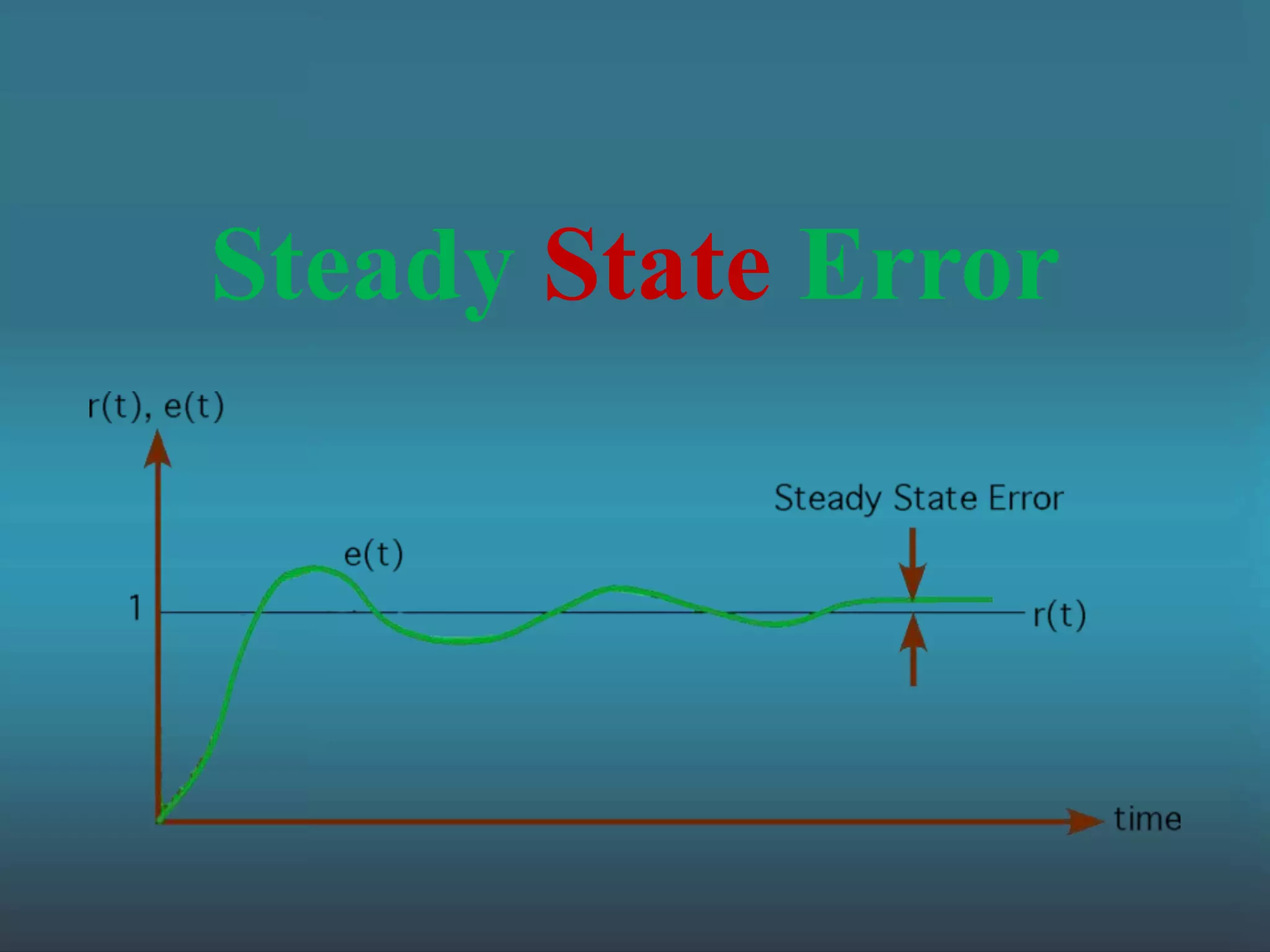

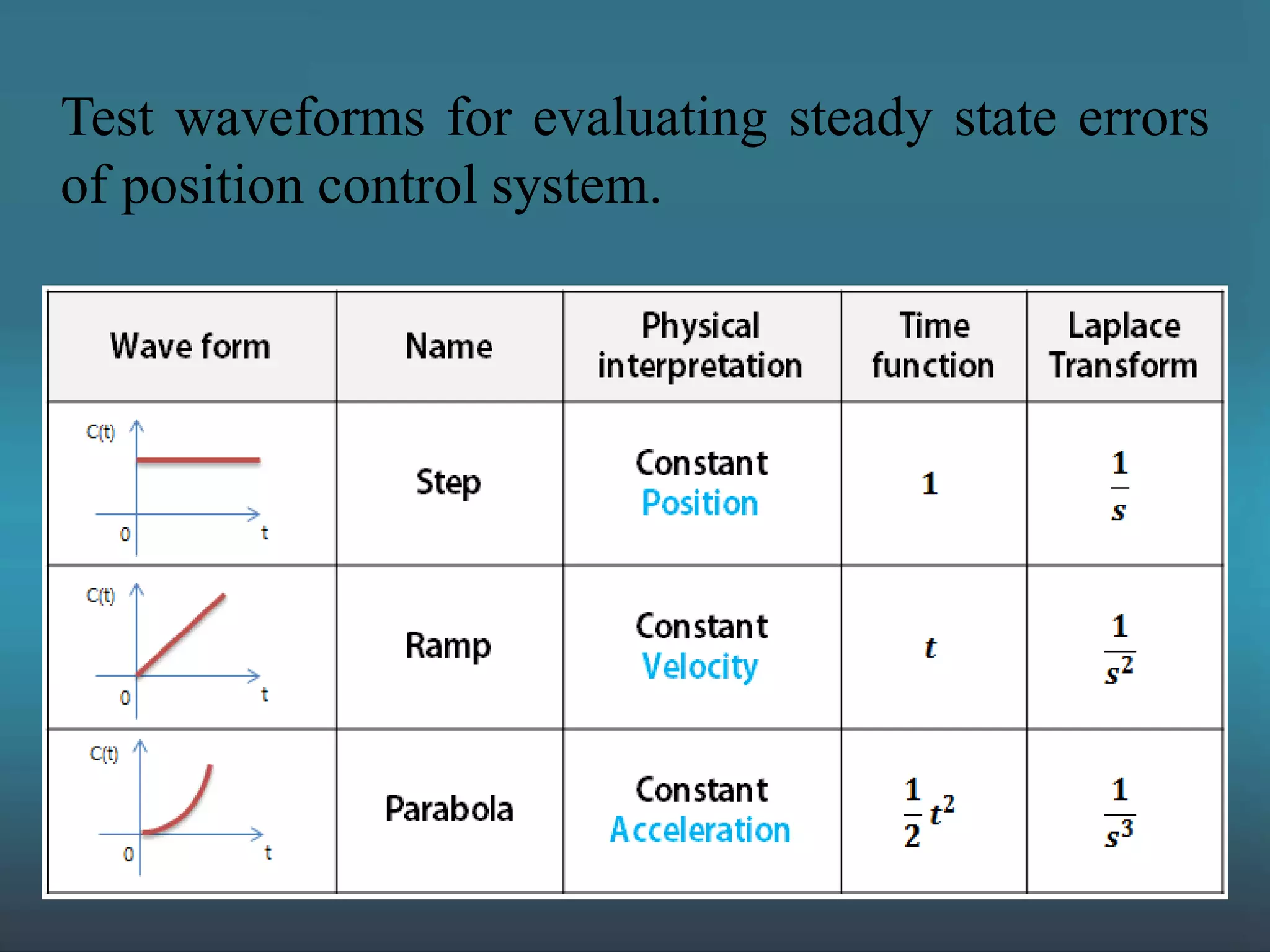

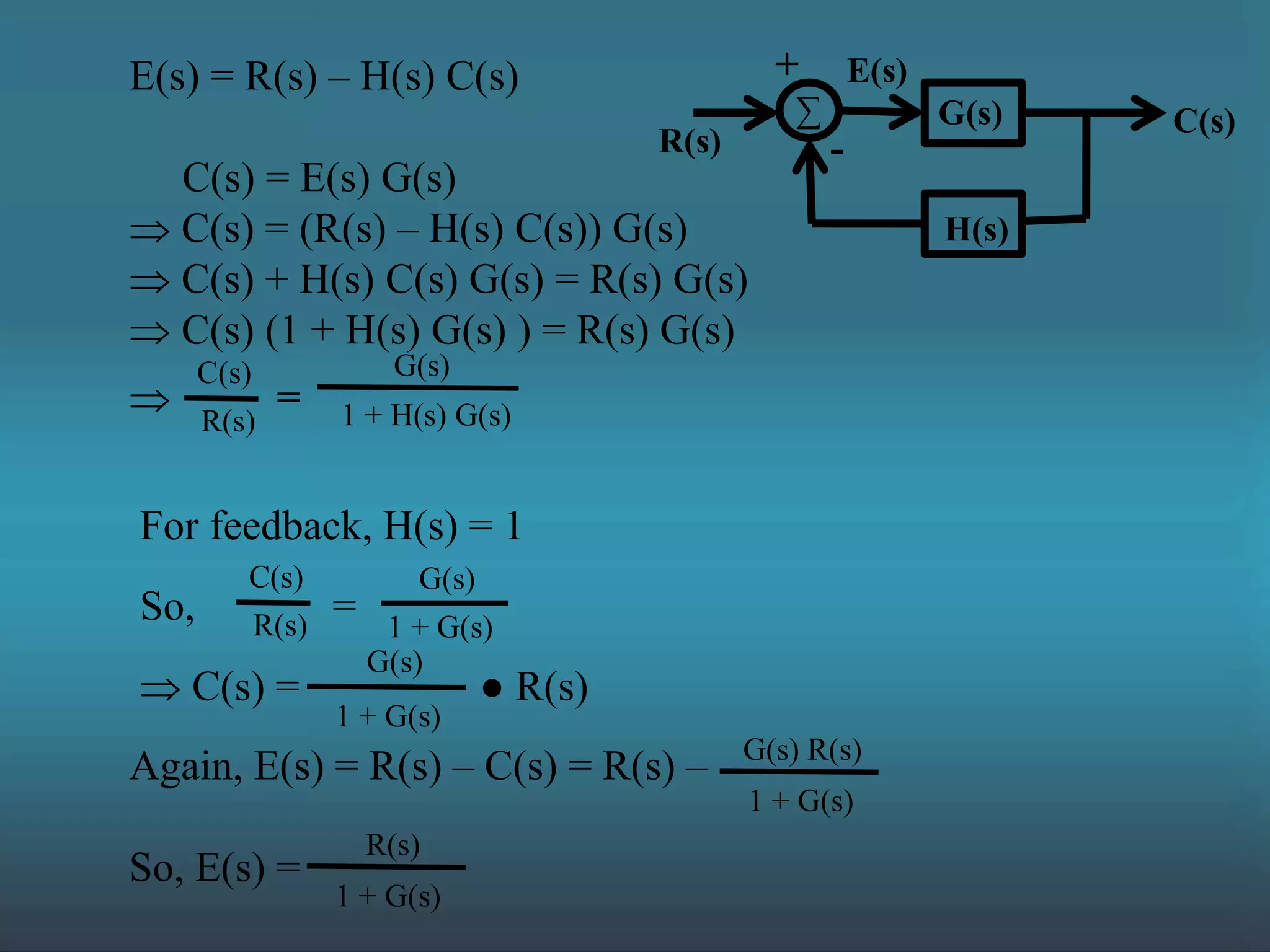
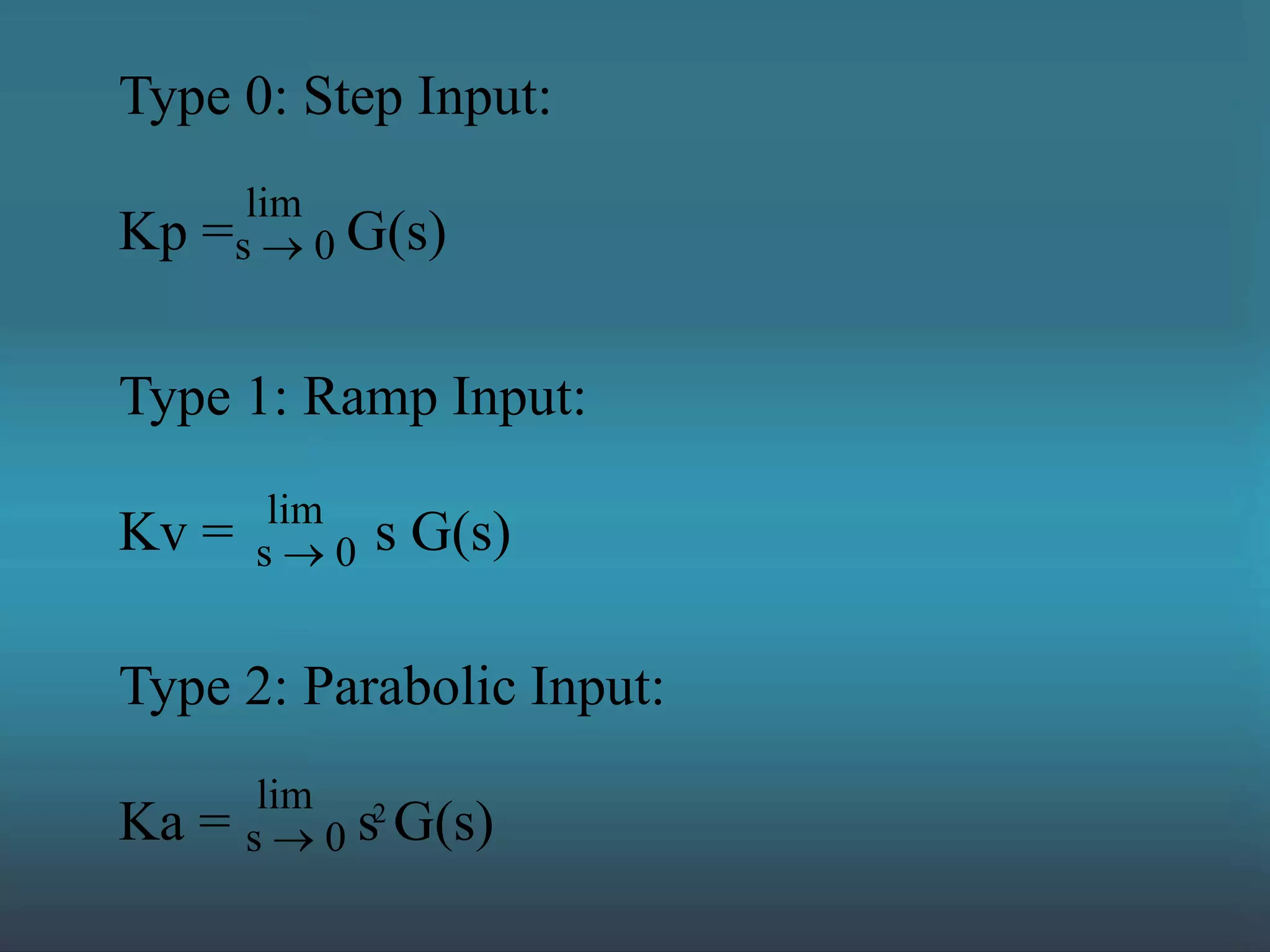



This document discusses steady state error in control systems. It defines steady state error as the difference between the input and output of a system as time approaches infinity. The steady state error depends on the type of input signal (step, ramp, or parabolic) and the system type (type 0, 1, or 2). The document provides equations to calculate steady state error for different system types and input signals. For example, a type 0 system has a steady state error of A/(1+Kp) for a step input, where Kp is the system gain and A is the input amplitude.





















































































