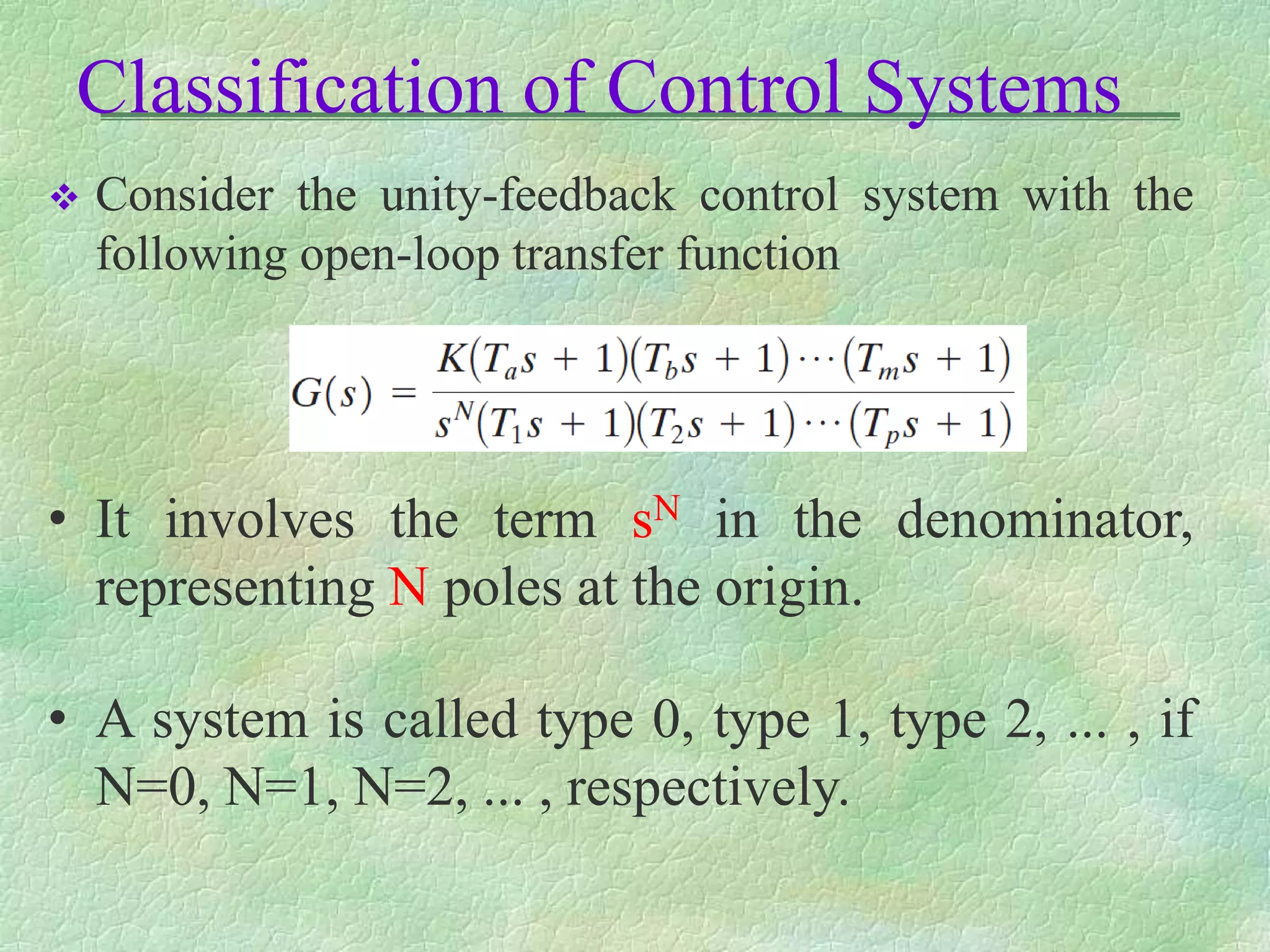
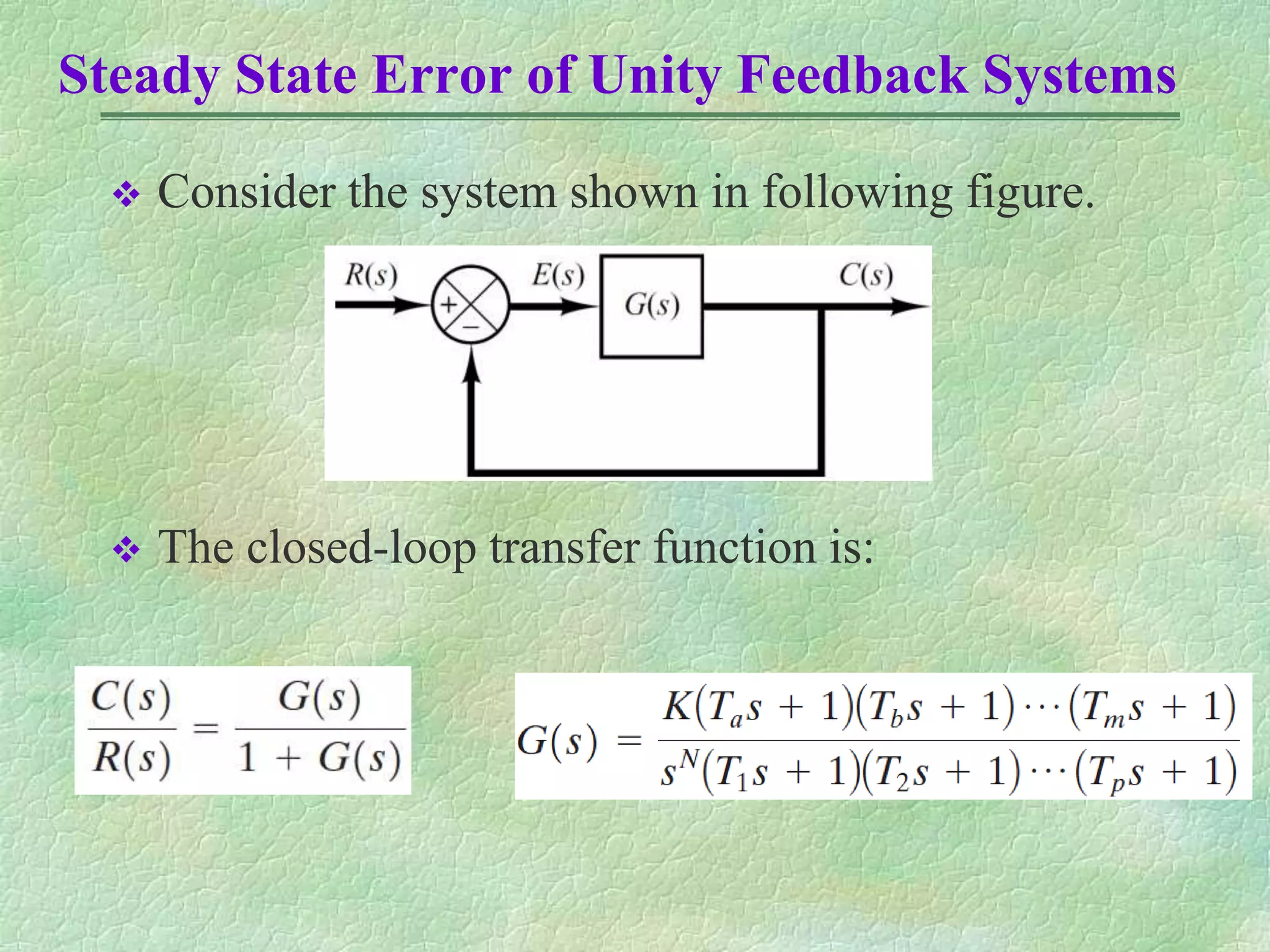
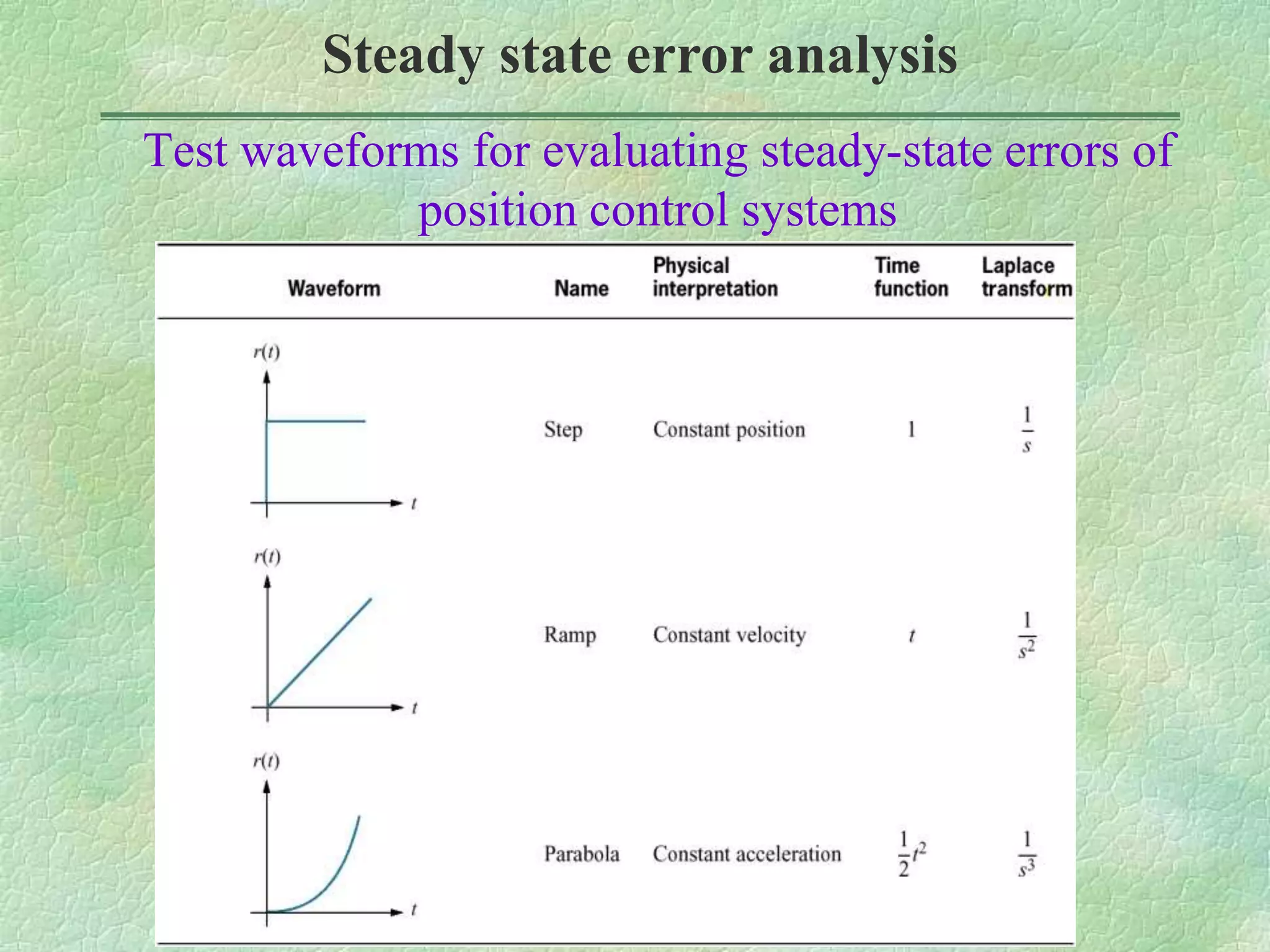
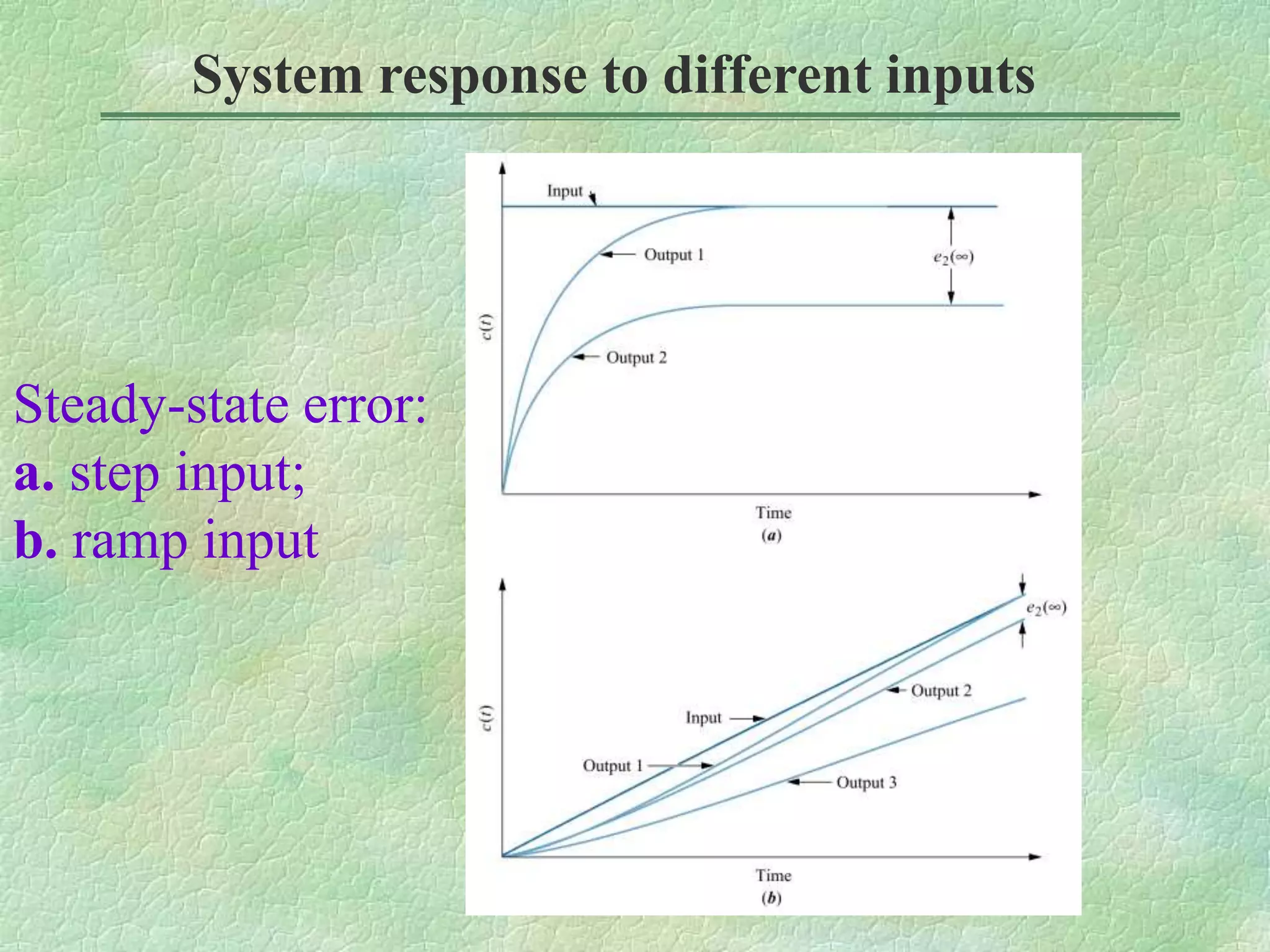
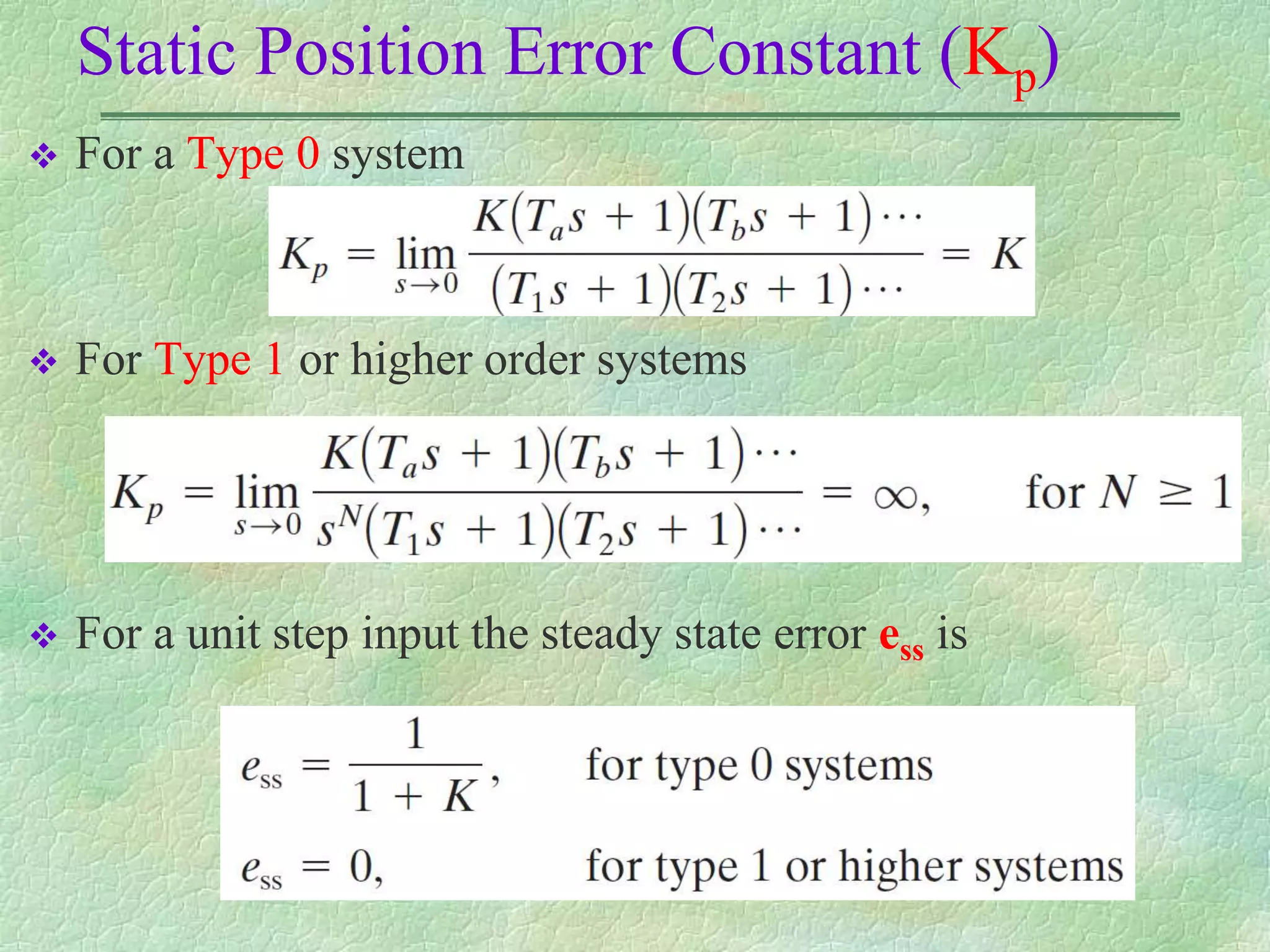
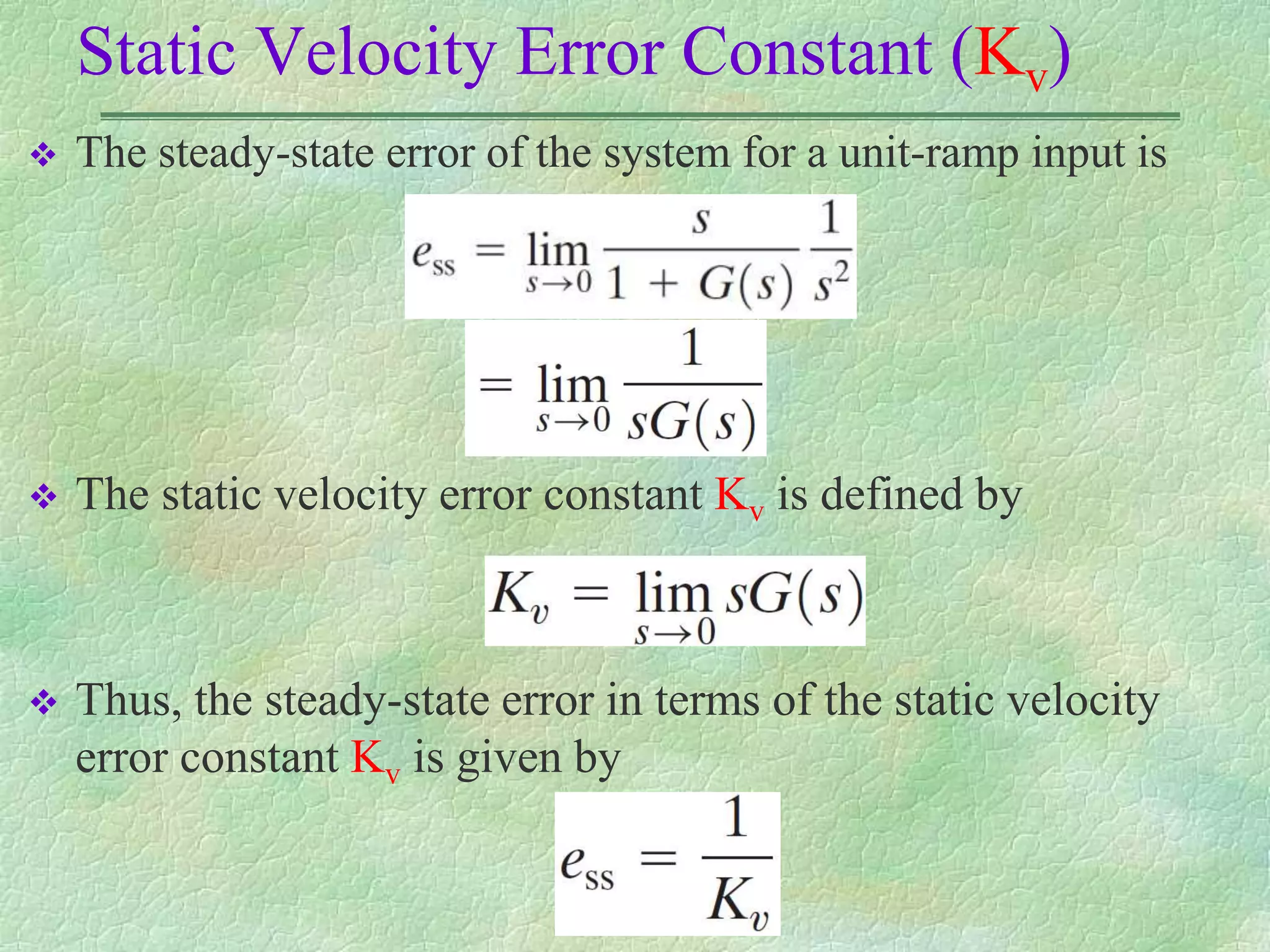
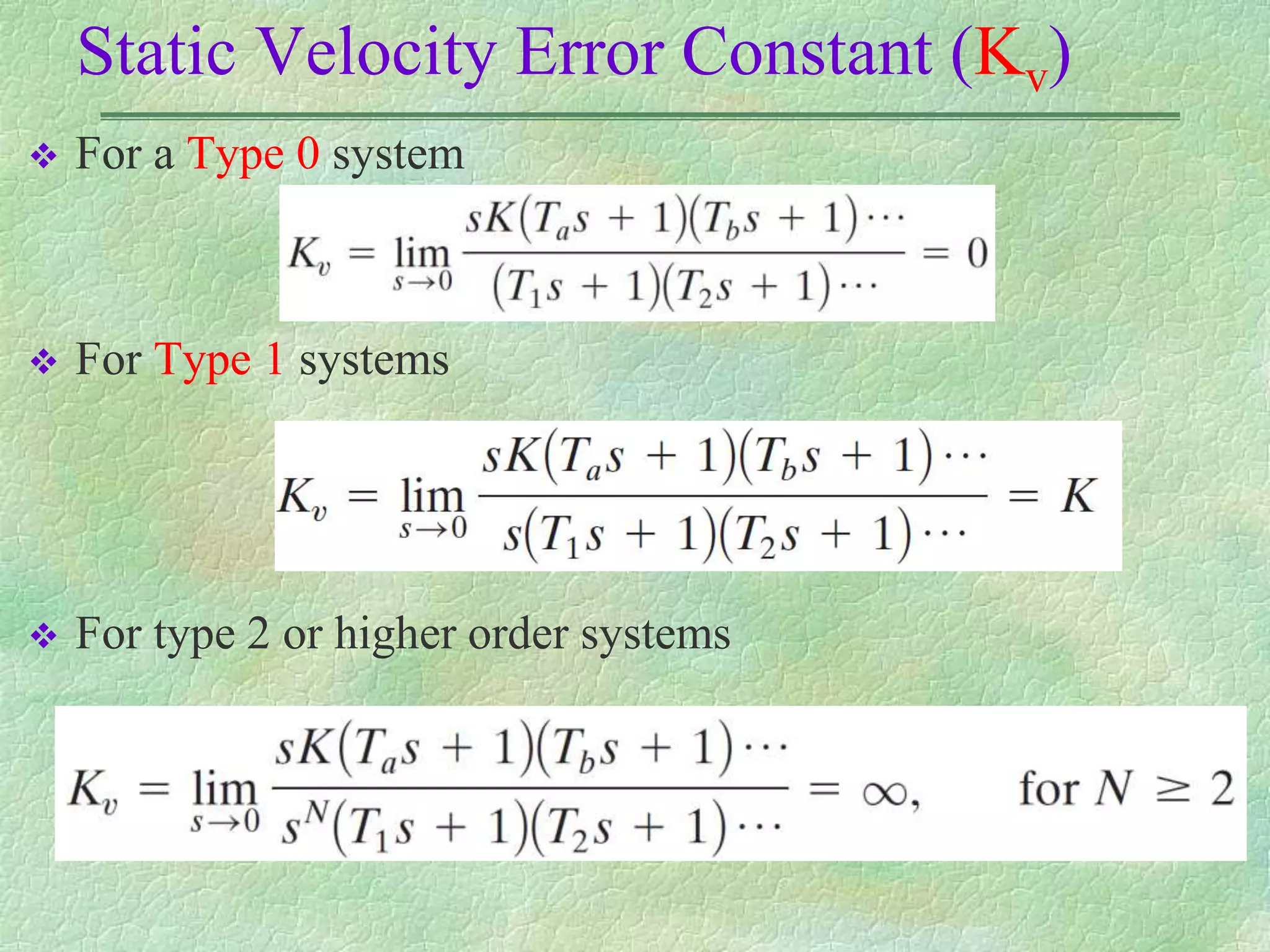
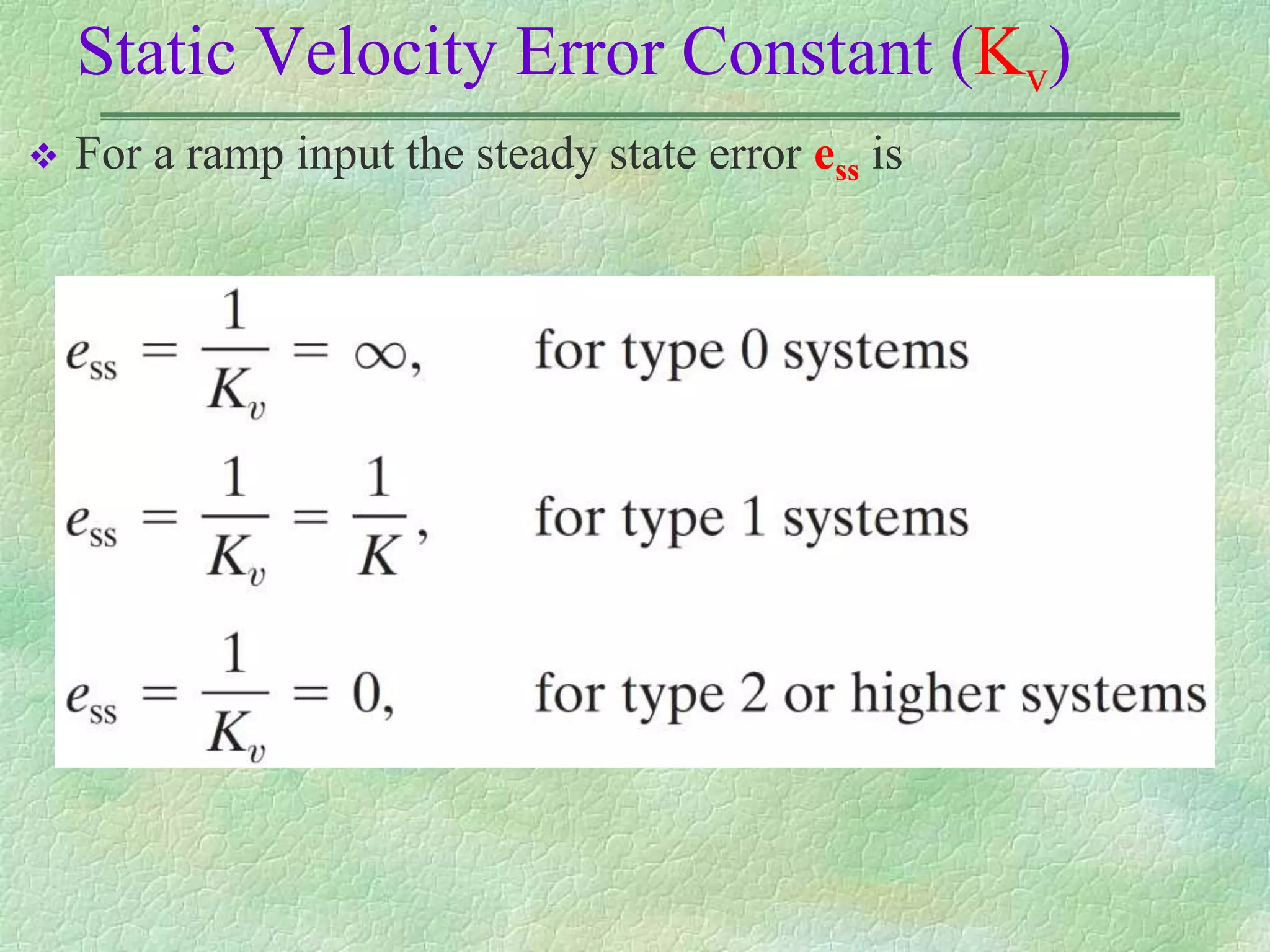
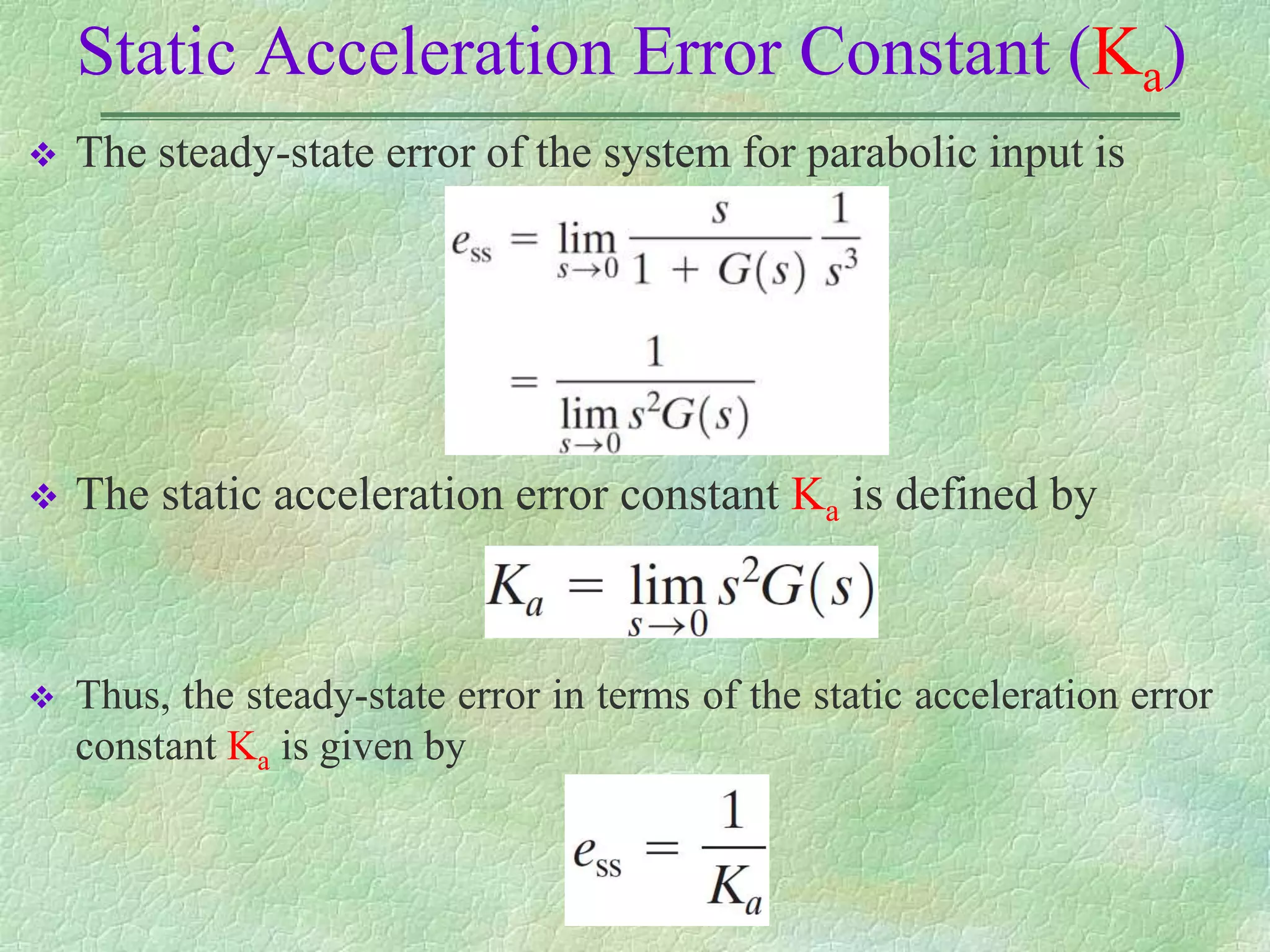
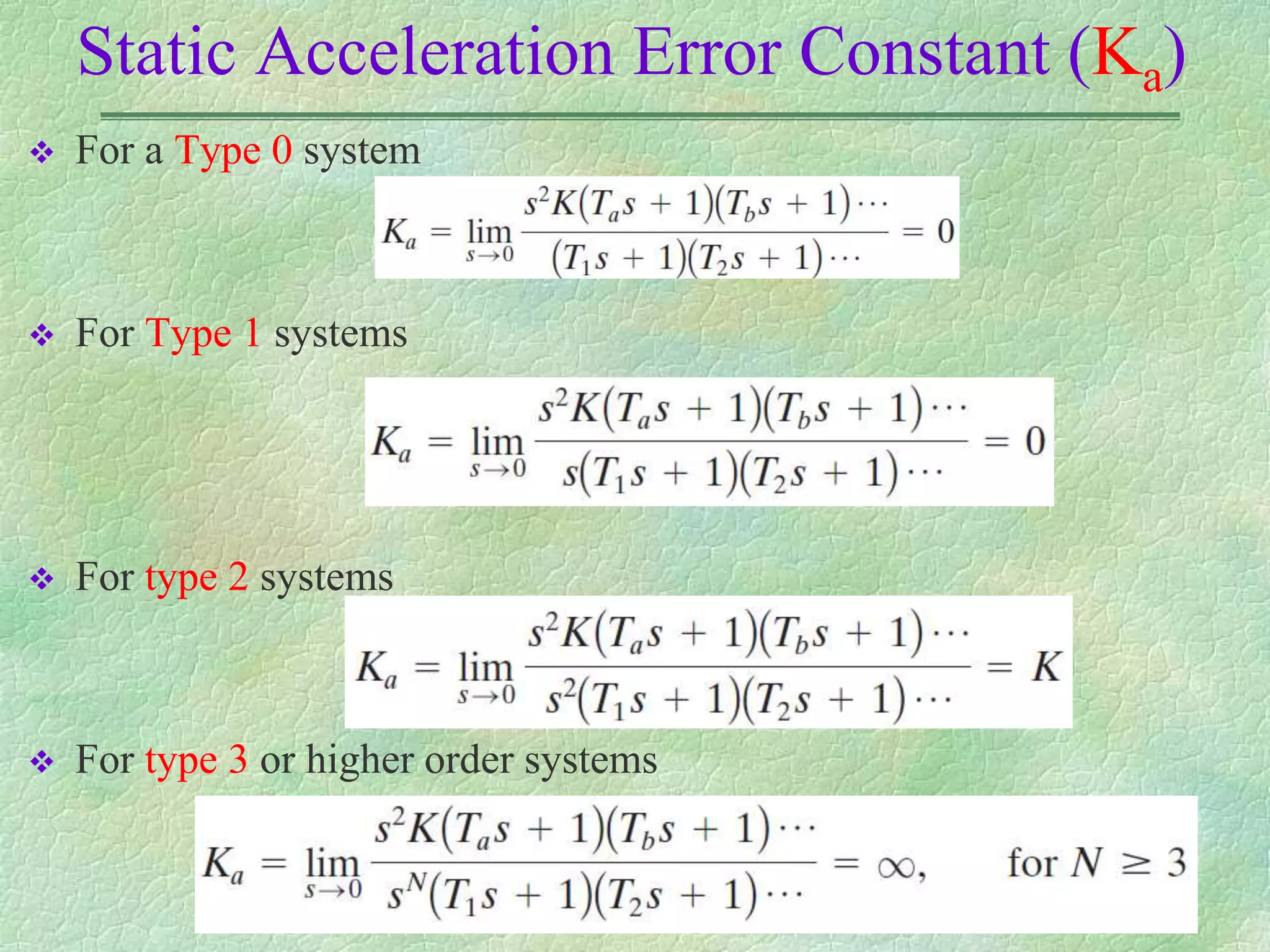
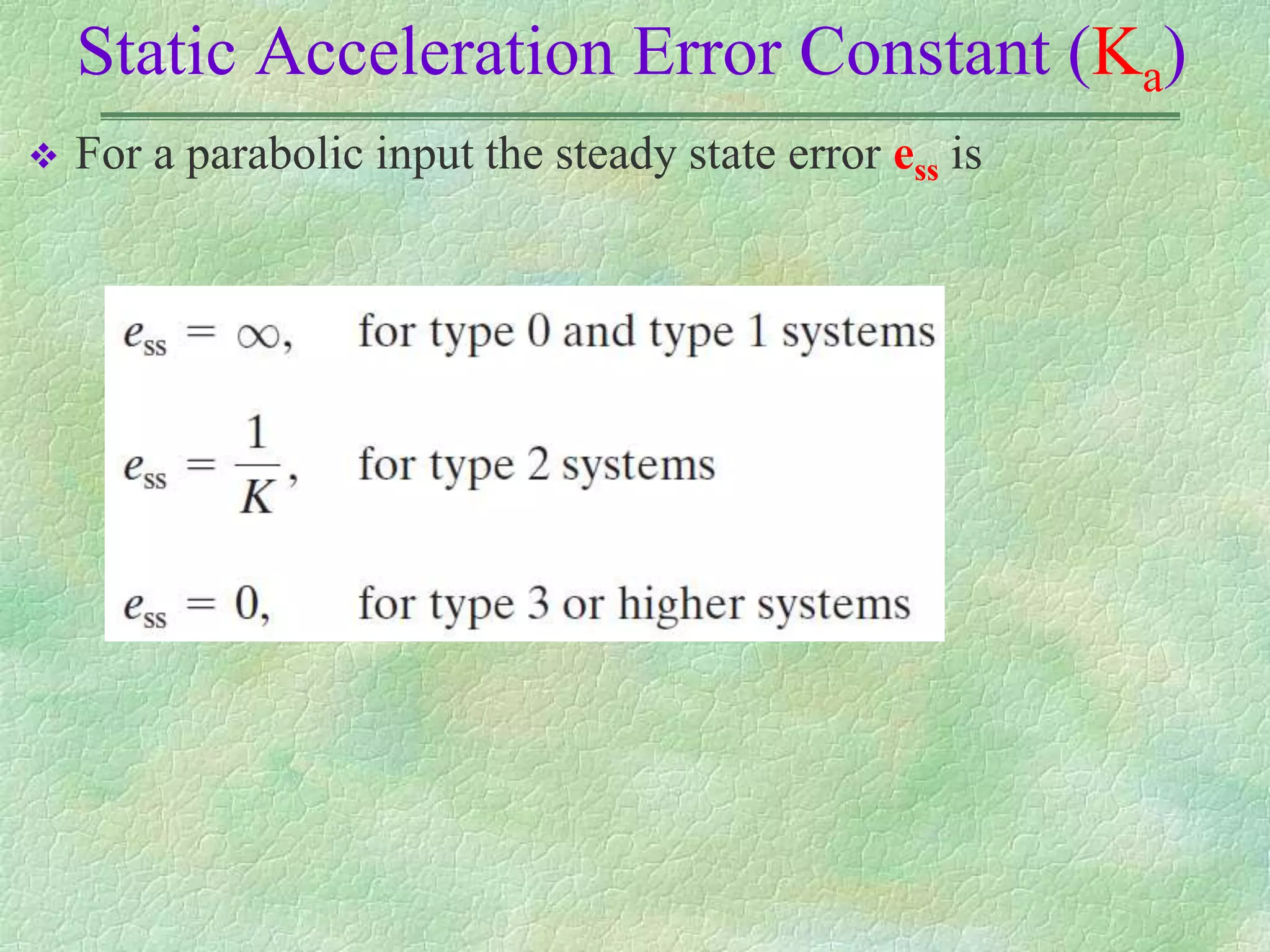
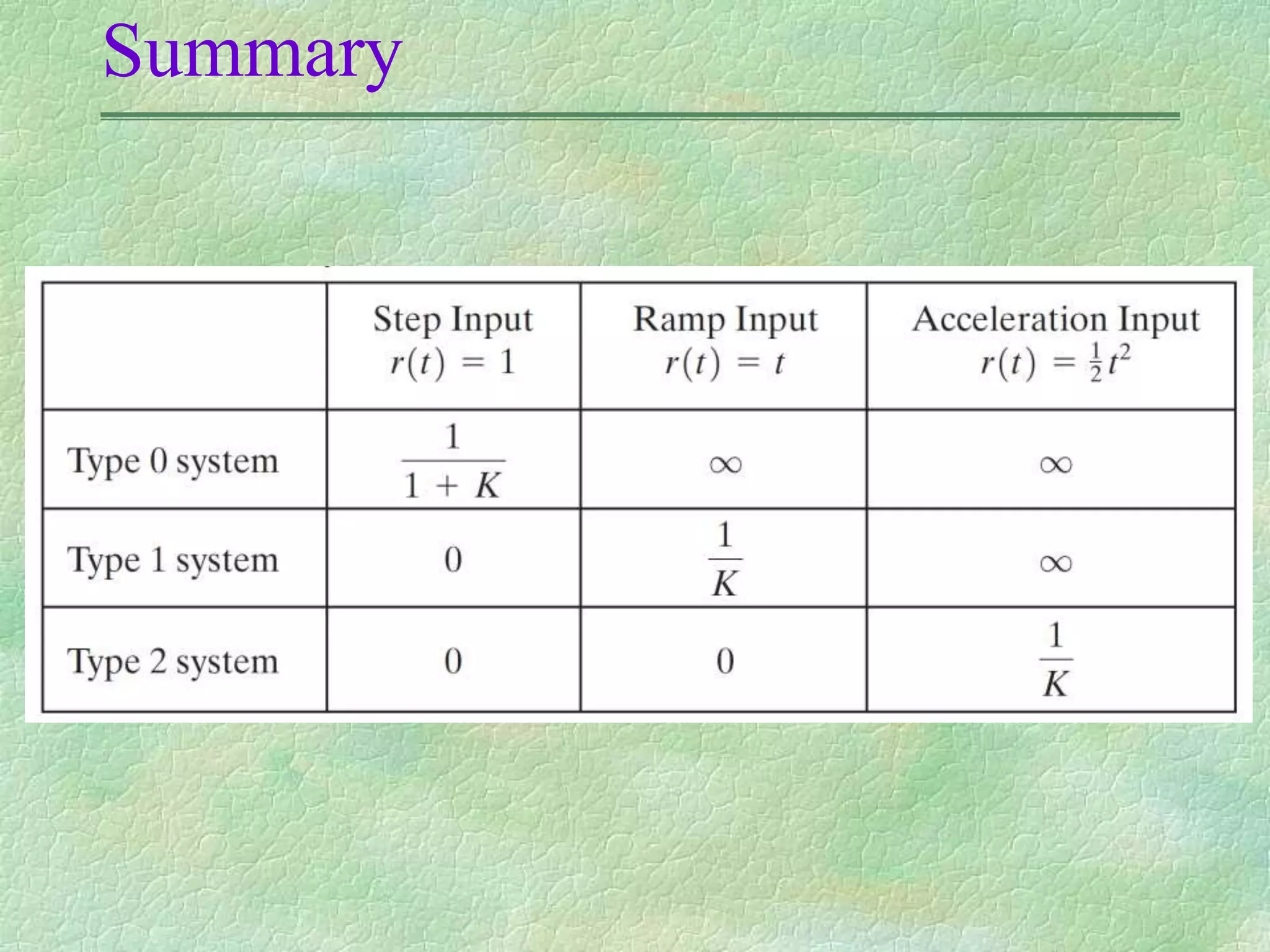
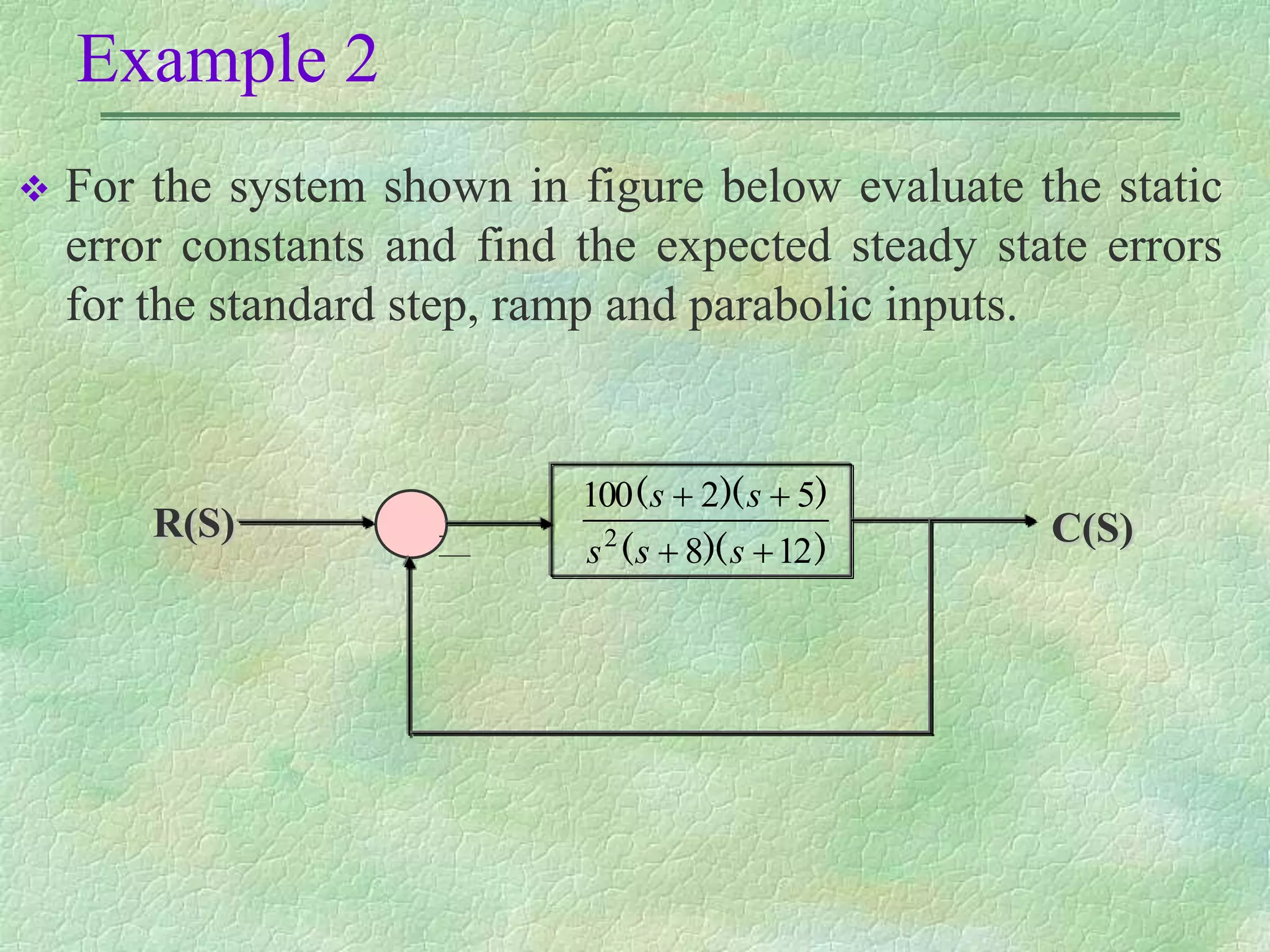
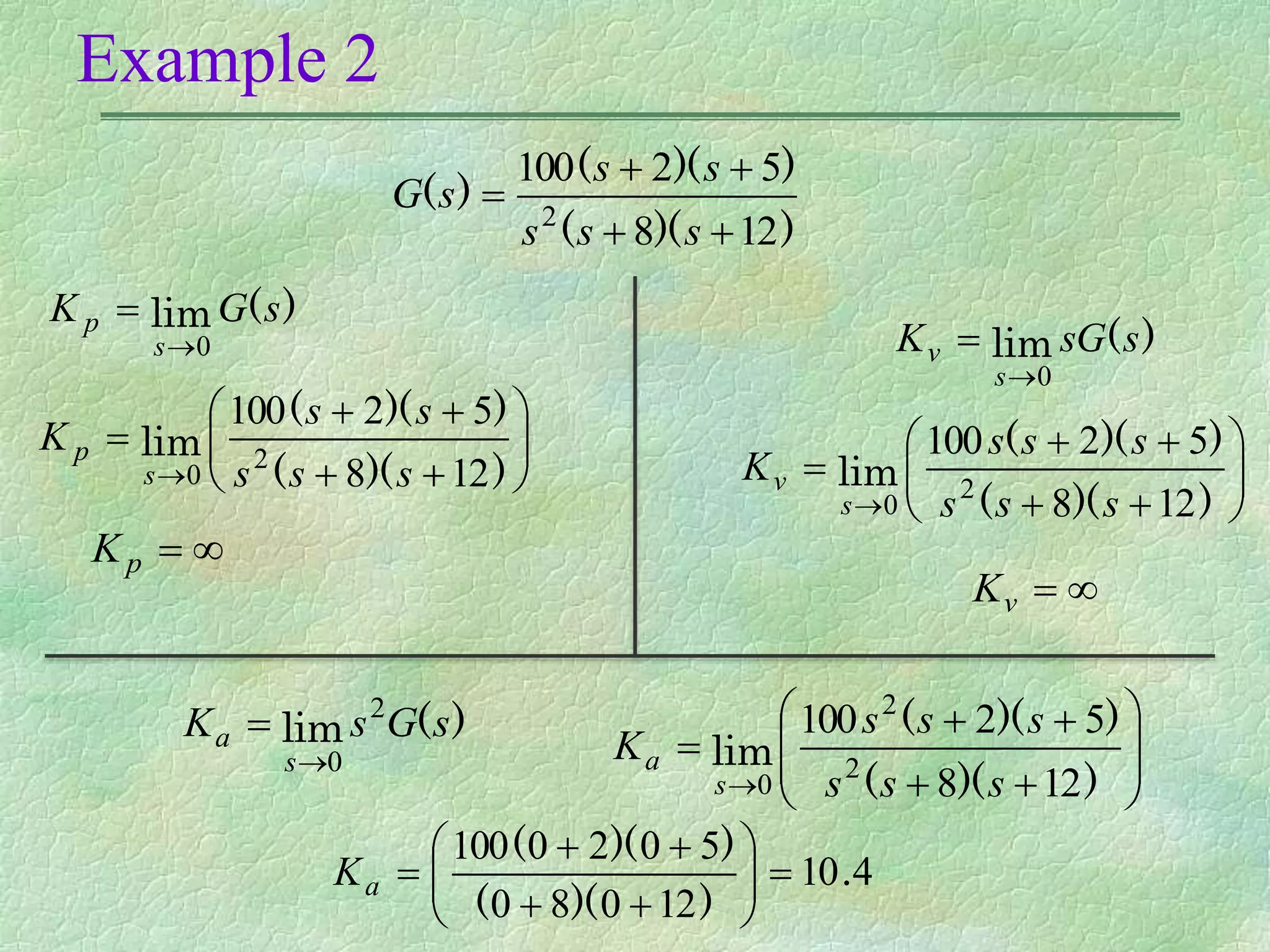
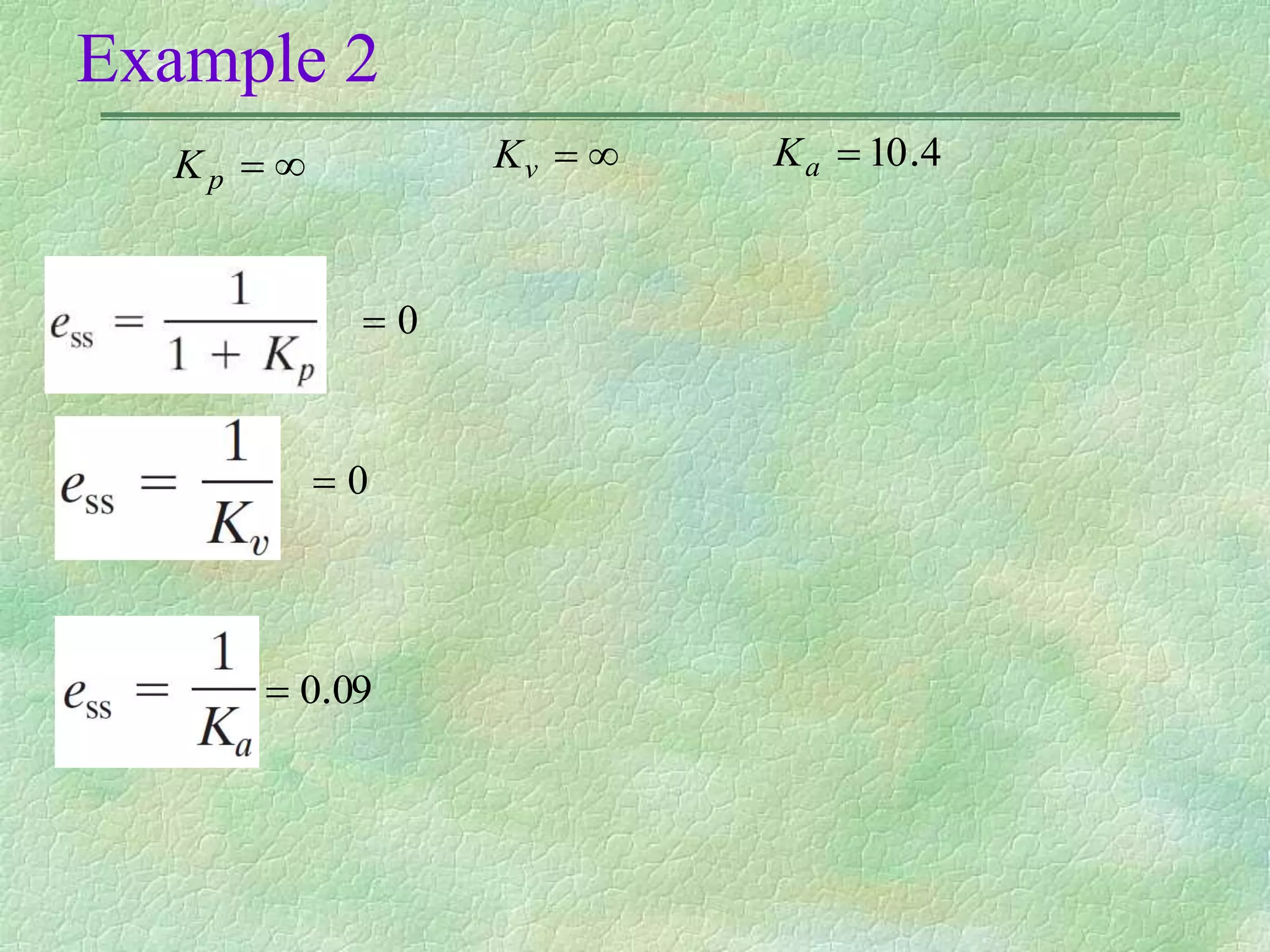
This document discusses control system performance and classification. It begins by classifying control systems based on the number of poles at the origin (type 0, 1, 2, etc.). Higher types improve accuracy but reduce stability. The document then examines steady state error for unity feedback systems, defining it as the error between the input and output signals as time approaches infinity. It introduces the concepts of static position, velocity, and acceleration error constants, and gives equations to calculate steady state error for different system types and input signals like steps, ramps, and parabolas. An example calculates these error constants for a specific system and finds the expected steady state errors.