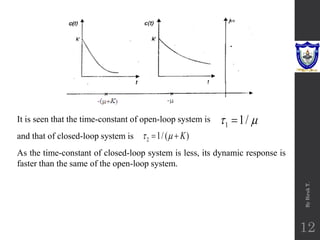
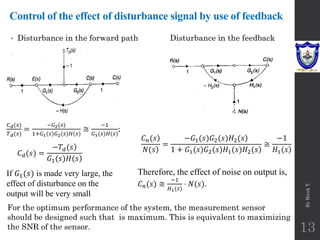
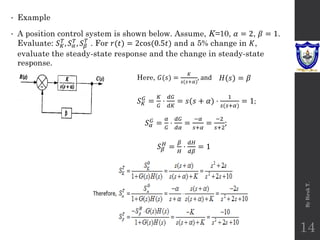
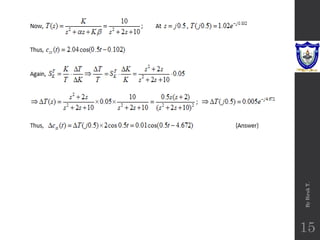
(1) The document discusses the characteristics and effects of feedback control systems. It describes how feedback can reduce sensitivity to parameter variations, improve stability, and reduce the impact of disturbances.
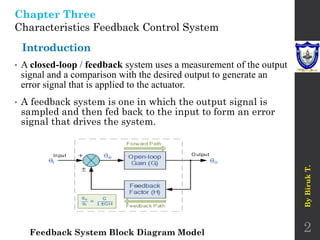
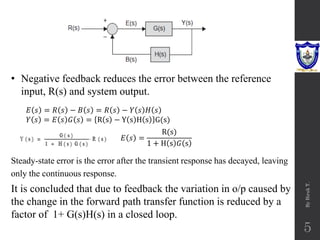
(2) Feedback works by sampling the output signal and comparing it to the desired output to generate an error signal. This error signal is used to adjust the system via negative feedback.
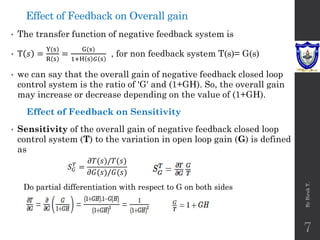
(3) While feedback provides advantages like improved robustness, it also introduces complexity and reduces the overall system gain. There is therefore a cost associated with incorporating feedback into a control system.

![• The use of feedback has several advantages as outlined in the previous
sections. These advantages have an attended cost due to an increased
number of components and complexity in the system.
• In an open-loop system the transfer function is G(s) and is reduced to
G(s)/[1 + G(s) H(s)] in a feedback (closed-loop) system.
• So, the loss of gain by the same factor of 1/[1 + G(s) H(s)] that reduces
the sensitivity of the system to parameter variations is again an added cost
of using feedback.
By
Biruk
T.
16
THE COST OF FEEDBACK](https://image.slidesharecdn.com/chapter3-221219071256-1e929ef1/85/Chapter-3-pdf-16-320.jpg)