Download to read offline

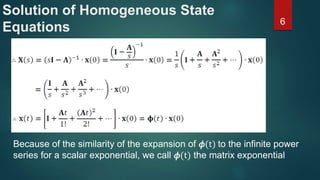
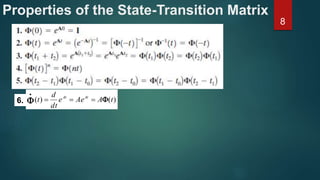

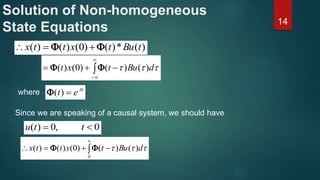
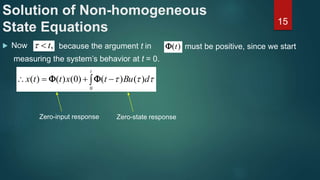

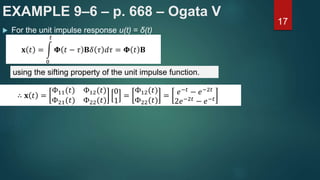
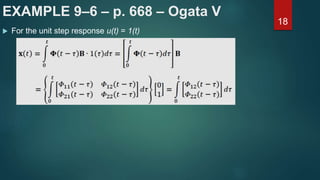
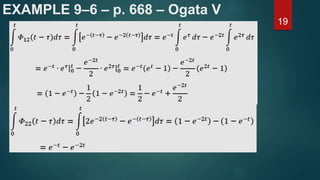
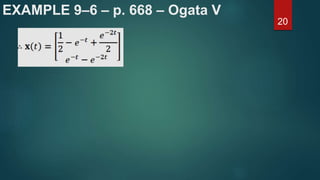

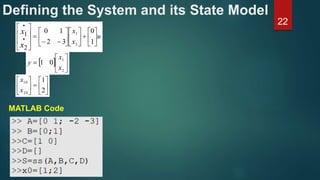
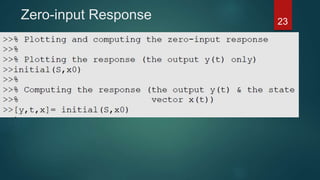




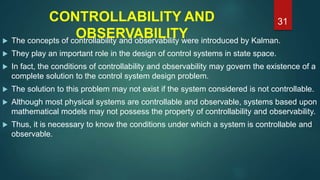
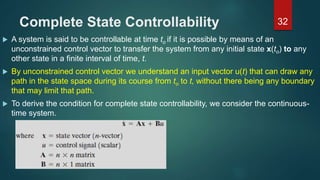
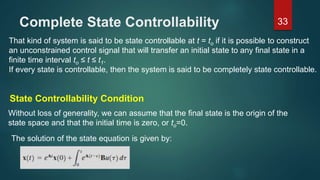
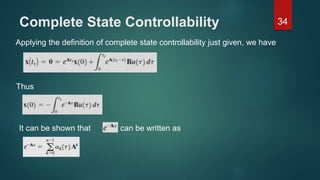
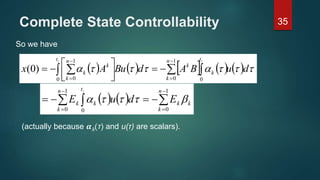
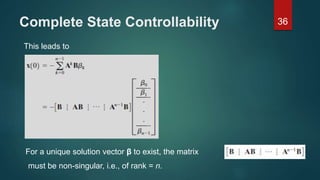
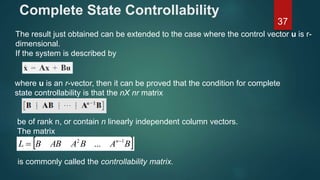
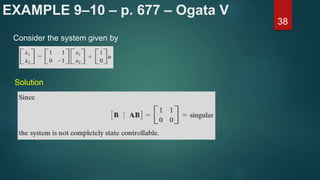
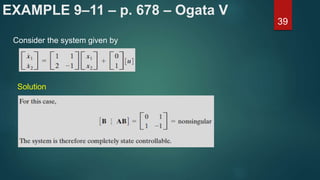


The document discusses concepts related to linear time-invariant systems represented by state-space models. It provides: 1) An overview of desired learning outcomes related to solving state equations and understanding controllability and observability. 2) Details on solving the homogeneous and non-homogeneous state equations, including definitions of zero-state and zero-input responses. 3) The condition for a system to be completely state controllable, which is that the controllability matrix must be of full rank.