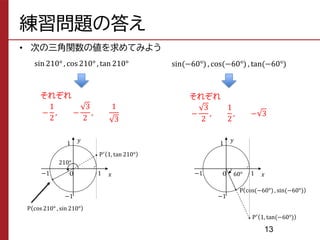
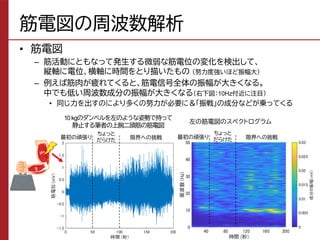
三角関数のいろいろな公式
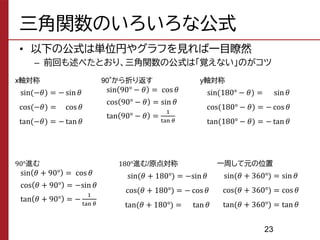
• 以下の公式は単位円やグラフを見れば一目瞭然
– 前回も述べたとおり、三角関数の公式は「覚えない」のがコツ
x軸対称
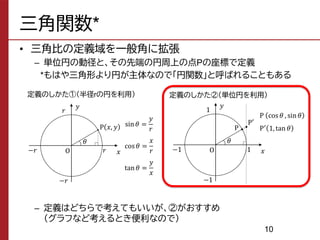
sin(−𝜃)= − sin 𝜃
cos(−𝜃) = cos 𝜃
tan(−𝜃) = − tan 𝜃
90°から折り返す
sin 90° − 𝜃 = cos 𝜃
cos 90° − 𝜃 = sin 𝜃
tan 90° − 𝜃 =
1
tan 𝜃
y軸対称
sin(180° − 𝜃) = sin 𝜃
cos(180° − 𝜃) = − cos 𝜃
tan(180° − 𝜃) = − tan 𝜃
90°進む
sin 𝜃 + 90° = cos 𝜃
cos 𝜃 + 90° = −sin 𝜃
tan 𝜃 + 90° = −
1
tan 𝜃
180°進む/原点対称
sin(𝜃 + 180°) = −sin 𝜃
cos(𝜃 + 180°) = − cos 𝜃
tan(𝜃 + 180°) = tan 𝜃
一周して元の位置
sin(𝜃 + 360°) = sin 𝜃
cos(𝜃 + 360°) = cos 𝜃
tan(𝜃 + 360°) = tan 𝜃
23
24.
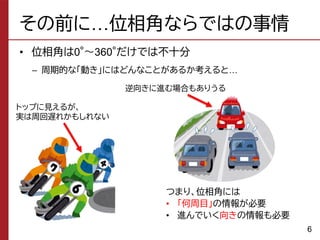
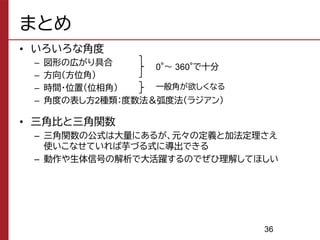
三角関数のいろいろな公式
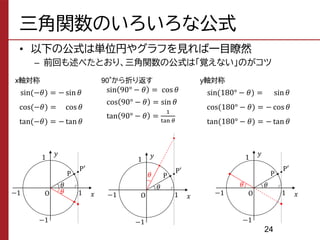
• 以下の公式は単位円やグラフを見れば一目瞭然
– 前回も述べたとおり、三角関数の公式は「覚えない」のがコツ
x軸対称
sin(−𝜃)= − sin 𝜃
cos(−𝜃) = cos 𝜃
tan(−𝜃) = − tan 𝜃
90°から折り返す
sin 90° − 𝜃 = cos 𝜃
cos 90° − 𝜃 = sin 𝜃
tan 90° − 𝜃 =
1
tan 𝜃
y軸対称
sin(180° − 𝜃) = sin 𝜃
cos(180° − 𝜃) = − cos 𝜃
tan(180° − 𝜃) = − tan 𝜃
𝑥
O
P′
𝜃
1
1
𝑦
−1
−1
P
𝑥
O
P′
𝜃
1
1
𝑦
−1
−1
P
𝜃
𝜃
𝑥
O
P′
𝜃
1
1
𝑦
−1
−1
P
𝜃
24
25.
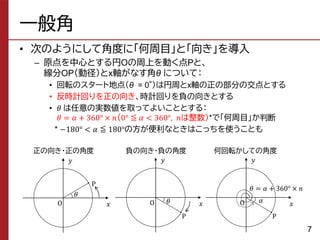
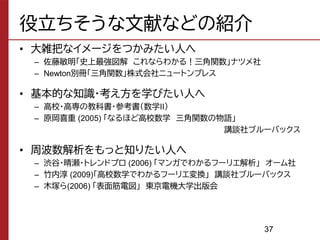
三角関数のいろいろな公式
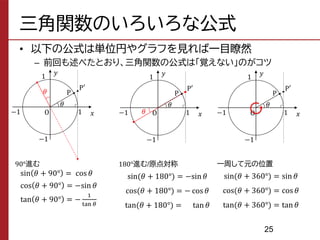
• 以下の公式は単位円やグラフを見れば一目瞭然
– 前回も述べたとおり、三角関数の公式は「覚えない」のがコツ
90°進む
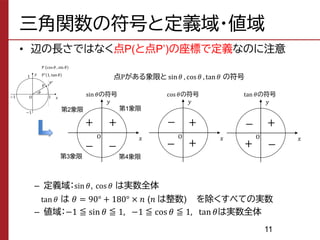
sin𝜃 + 90° = cos 𝜃
cos 𝜃 + 90° = −sin 𝜃
tan 𝜃 + 90° = −
1
tan 𝜃
180°進む/原点対称
sin(𝜃 + 180°) = −sin 𝜃
cos(𝜃 + 180°) = − cos 𝜃
tan(𝜃 + 180°) = tan 𝜃
一周して元の位置
sin(𝜃 + 360°) = sin 𝜃
cos(𝜃 + 360°) = cos 𝜃
tan(𝜃 + 360°) = tan 𝜃
𝑥
O
P′
𝜃
1
1
𝑦
−1
−1
P
𝜃
𝑥
O
P′
𝜃
1
1
𝑦
−1
−1
P
𝜃 𝑥
O
P′
𝜃
1
1
𝑦
−1
−1
P
25
26.
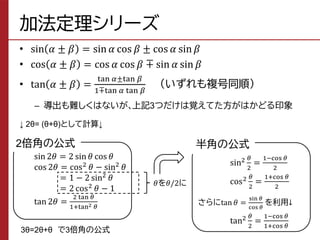
加法定理シリーズ
• sin 𝛼± 𝛽 = sin 𝛼 cos 𝛽 ± cos 𝛼 sin 𝛽
• cos 𝛼 ± 𝛽 = cos 𝛼 cos 𝛽 ∓ sin 𝛼 sin 𝛽
• tan 𝛼 ± 𝛽 =
tan 𝛼±tan 𝛽
1∓tan 𝛼 tan 𝛽
(いずれも複号同順)
– 導出も難しくはないが、上記3つだけは覚えてた方がはかどる印象
半角の公式
sin2 𝜃
2
=
1−cos 𝜃
2
cos2 𝜃
2
=
1+cos 𝜃
2
さらにtan 𝜃 =
sin 𝜃
cos 𝜃
を利用↓
tan2 𝜃
2
=
1−cos 𝜃
1+cos 𝜃
𝜃を𝜃/2に
半角の公式
2倍角の公式
sin 2𝜃 = 2 sin 𝜃 cos 𝜃
cos 2𝜃 = cos2 𝜃 − sin2 𝜃
= 1 − 2 sin2 𝜃
= 2 cos2 𝜃 − 1
tan 2𝜃 =
2 tan 𝜃
1+tan2 𝜃
↓ 2θ= (θ+θ)として計算↓
2倍角の公式
3θ=2θ+θ で3倍角の公式
27.
sin 𝛼 cos𝛽 =
sin 𝛼+𝛽 + sin 𝛼−𝛽
2
cos 𝛼 sin 𝛽 =
sin 𝛼+𝛽 −sin 𝛼−𝛽
2
cos 𝛼 cos 𝛽 =
cos 𝛼+𝛽 +cos 𝛼−𝛽
2
sin 𝛼 sin 𝛽 = −
cos 𝛼+𝛽 −cos 𝛼−𝛽
2
sin 𝐴 + sin 𝐵 = 2 sin
𝐴+𝐵
2
cos
𝐴−𝐵
2
sin 𝐴 − sin 𝐵 = 2 cos
𝐴+𝐵
2
sin
𝐴−𝐵
2
cos 𝐴 + cos 𝐵 = 2 cos
𝐴+𝐵
2
cos
𝐴−𝐵
2
cos 𝐴 − cos 𝐵 = −2 sin
𝐴+𝐵
2
sin
𝐴−𝐵
2
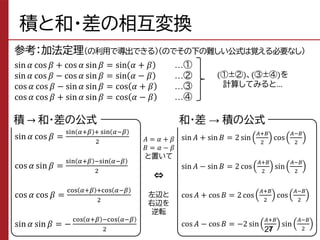
積と和・差の相互変換
参考:加法定理(の利用で導出できる)(のでその下の難しい公式は覚える必要なし)
sin 𝛼 cos 𝛽 + cos 𝛼 sin 𝛽 = sin 𝛼 + 𝛽 …①
sin 𝛼 cos 𝛽 − cos 𝛼 sin 𝛽 = sin 𝛼 − 𝛽 …②
cos 𝛼 cos 𝛽 − sin 𝛼 sin 𝛽 = cos 𝛼 + 𝛽 …③
cos 𝛼 cos 𝛽 + sin 𝛼 sin 𝛽 = cos 𝛼 − 𝛽 …④
積 → 和・差の公式 和・差 → 積の公式
(①±②)、(③±④)を
計算してみると…
𝐴 = 𝛼 + 𝛽
𝐵 = 𝛼 − 𝛽
と置いて
⇔
左辺と
右辺を
逆転
27
28.
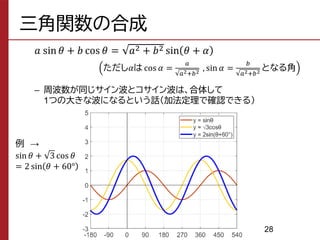
三角関数の合成
𝑎 sin 𝜃+ 𝑏 cos 𝜃 = 𝑎2 + 𝑏2 sin 𝜃 + 𝛼
ただし𝛼は cos 𝛼 =
𝑎
𝑎2+𝑏2
, sin 𝛼 =
𝑏
𝑎2+𝑏2
となる角
– 周波数が同じサイン波とコサイン波は、合体して
1つの大きな波になるという話(加法定理で確認できる)
28
例 →
sin 𝜃 + 3 cos 𝜃
= 2 sin 𝜃 + 60°