Downloaded 204 times


![5
SOLO
History (continue - 2)
Al-Jayyani (989–1079), an Arabic mathematician in the Islamic
Iberian Peninsula, wrote what some consider the first treatise on
spherical trigonometry, circa 1060, entitled The book of
unknown arcs of a sphere,[6]
in which spherical trigonometry was
brought into its modern form. Al-Jayyani's book "contains
formulae for right-angle triangles, the general law of sines and
the solution of a spherical triangle by means of the polar
triangle". This treatise later had a "strong influence on
European mathematics", and his "definition of ratios as
numbers" and "method of solving a spherical triangle when all
sides are unknown" are likely to have influenced
Regiomontanus.
In the 13th century, Persian mathematician Nasīr al-Dīn al-Tūsī
was the first to treat trigonometry as a mathematical discipline
independent from astronomy, and he further developed spherical
trigonometry, bringing it to its present form.[7]
He listed the six
distinct cases of a right-angled triangle in spherical
trigonometry. In his On the Sector Figure, he also stated the law
of sines for plane and spherical triangles, and discovered the law
of tangents for spherical triangles
Khawaja Muhammad ibn
Muhammad
ibn Hasan Tūsī
(1201 -1274 )
Abū Abd Allāh Mu ammadʿ ḥ
ibn Mu ādh al-Jayyānīʿ [1]
(989– 1079
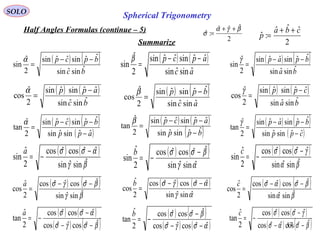
Spherical Trigonometry
Return to Table of Content](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-5-320.jpg)











![19
SOLO
Delambre-Gauss Equations
Jean Baptiste Joseph
chevalier Delambre
(1749 –1822)
Using (12) and (13) we can write
2
ˆ
sin
2
ˆ
cos
2
ˆ
cos
2
ˆ
sin
2
ˆˆ
sin
βαβαβα
±=
±
( ) ( ) ( ) ( ) ( ) ( )
ca
cpap
cb
app
ca
bpp
bc
bpcp
ˆsinˆsin
ˆˆsinˆˆsin
ˆsinˆsin
ˆˆsinˆsin
ˆsinˆsin
ˆˆsinˆsin
ˆsinˆsin
ˆˆsinˆˆsin −−−
±
−−−
=
( ) ( ) ( )[ ]
−
+
−
−
+
−
=−±−
−
=
2
ˆˆ
sin
2
ˆˆ
ˆcos2
2
ˆˆ
cos
2
ˆˆ
ˆsin2
2
ˆ
cos
ˆsin
1
ˆˆsinˆˆsin
ˆsinˆsin
ˆˆsinˆsin
ˆsin
1
baba
p
baba
p
c
apbp
ba
cpp
c
γ
−
−
=
−
−
=
2
ˆ
cos
2
ˆ
sin
2
ˆˆ
sin
2
ˆ
cos
2
ˆ
cos
2
ˆˆ
cos
2
ˆˆ
sin
2
ˆ
cos2
2
ˆˆ
cos
2
ˆ
sin2
2
ˆ
cos
2
ˆ
cos
2
ˆ
sin2
1
γ
γ
γ
c
ba
c
ba
bac
bac
cc
Spherical Trigonometry
Carl Friedrich
Gauss
(1777 – 1855)](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-19-320.jpg)

![21
SOLO
Delambre-Gauss Equations (continue – 2)
Jean Baptiste Joseph
chevalier Delambre
(1749 –1822)
25
Also
2
ˆ
sin
2
ˆ
sin
2
ˆ
cos
2
ˆ
cos
2
ˆˆ
cos
βαβαβα
=
±
( ) ( ) ( ) ( ) ( ) ( )
ca
cpap
bc
bpcp
ca
bpp
cb
app
ˆsinˆsin
ˆˆsinˆˆsin
ˆsinˆsin
ˆˆsinˆˆsin
ˆsinˆsin
ˆˆsinˆsin
ˆsinˆsin
ˆˆsinˆsin −−−−−−
=
( ) ( ) ( )[ ]
−
−
=−
−−
=
2
ˆ
ˆsin
2
ˆ
cos2
2
ˆ
ˆcos
2
ˆ
sin2
2
ˆ
sin
ˆsin
1
ˆˆsinˆsin
ˆsinˆsin
ˆˆsinˆˆsin
ˆsin
1
c
p
c
c
p
c
c
cpp
ba
apbp
c
γ
+
+
=
+
+
=
2
ˆ
sin
2
ˆ
sin
2
ˆˆ
sin
2
ˆ
sin
2
ˆ
cos
2
ˆˆ
cos
2
ˆˆ
sin
2
ˆ
cos2
2
ˆˆ
cos
2
ˆ
sin2
2
ˆ
sin
2
ˆ
cos
2
ˆ
sin2
1
γ
γ
γ
c
ba
c
ba
bac
bac
cc
Therefore
2
ˆ
sin
2
ˆˆ
cos
2
ˆ
cos
2
ˆˆ
cos
γβα bac +
=
+
2
ˆ
sin
2
ˆˆ
sin
2
ˆ
sin
2
ˆˆ
cos
γβα bac +
=
−26
Spherical Trigonometry
Return to Table of Content
Carl Friedrich
Gauss
(1777 – 1855)](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-21-320.jpg)
![22
SOLO
Napier’s Equations [4]
John Napier
of Merchiston
(1550 –1617)
Divide (23) by (25)
2
ˆ
cot
2
ˆˆ
cos
2
ˆˆ
cos
2
ˆˆ
tan
γβα
ba
ba
+
−
=
+
to obtain
28
Divide (24) by (26)
2
ˆ
cot
2
ˆˆ
sin
2
ˆˆ
sin
2
ˆˆ
tan
γβα
ba
ba
+
−
=
−
to obtain
27
Spherical Trigonometry
2
ˆˆ
sin
2
ˆˆ
sin
2
ˆ
cot
2
ˆˆ
tan
ba
ba
+
−
=
−
γ
βα
2
ˆˆ
cos
2
ˆˆ
cos
2
ˆ
cot
2
ˆˆ
tan
ba
ba
+
−
=
+
γ
βα](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-22-320.jpg)



![27
NavigationSOLO
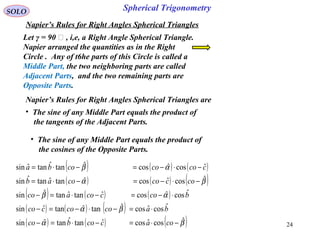
Flight on Earth Great Circles
The Great Circle Distance between two points 1 and
2 is ρ.
θρ ⋅= a
1
2
111 ,, λφR
222 ,, λφR
R – radius
- Latitudeϕ
λ - Longitude
( )
( ) ( ) ( ) ( ) ( )212121 cos90sin90sin90cos90cos
/coscos
λλφφφφ
ρθ
−⋅−⋅−+−⋅−=
=
a
From the Law of Cosines for Spherical Triangles
or
( ) ( )212121 coscoscossinsin/cos λλφφφφρ −⋅⋅+⋅=a
( ){ }212121
1
coscoscossinsincos λλφφφφρ −⋅⋅+⋅⋅= −
a
The Initial Heading Angle ψ0 can be obtained using the
Law of Cosines for Spherical Triangles as follows
( )
( )a
a
/sincos
/cossinsin
cos
1
12
0
ρφ
ρφφ
ψ
⋅
⋅−
=
( )[ ]
( )[ ]2
222
22221
coscoscossinsin1cos
coscoscossinsinsinsin
cos
λλφφφφφ
λλφφφφφφ
ψ
−⋅⋅+⋅−⋅
−⋅⋅+⋅⋅−
= −
The Heading Angle ψ from the Present Position (R, ,λ) to Destination Point (Rϕ 2,ϕ2,λ2)](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-27-320.jpg)
![29
NavigationSOLO
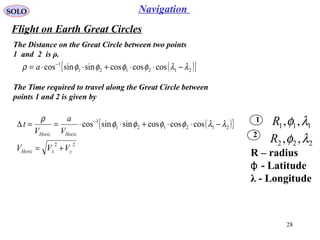
Flight on Earth Great Circles
1
2
111 ,, λφR
222 ,, λφR
If the Aircraft flies with an Heading Error Δψ we want to calculate the Down Range
Error Xd and Cross Range Error Yd, in the Spherical Triangle APB.
R – radius
- Latitudeϕ
λ - Longitude
Using the Law of Cosines for Spherical Triangle APB we have
( ) ( )aaYd /sin
90sin
/sin
sin
ρ
ψ
=
∆
( ) ( ) ( )
( ) ( ) 2/sin/sin
/cos/cos/cos
0ˆcos 21
90ˆ
RR
a
aYaX
aYaXa
P
dd
dd
P +
=
⋅
⋅−
==
= ρ
Using the Law of Sines for Spherical Triangle APB we have
( )
( )
⋅= −
aY
a
aX
d
d
/cos
/cos
cos 1 ρ
( )[ ]ψρ ∆⋅⋅= −
sin/sinsin 1
aaYd
Return to Table of Content](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-29-320.jpg)
![30
SOLO
References
http://en.wikipedia.org/wiki/
[1] Lass H, “Vector and Tensor Analysis”, McGraw-Hill, 1950, pp.25-27
[2] Wertz, J. editor, “Spacecraft Attitude Determination
andControl”,
Appendix A, D.Reidel Publishing Company, 1985
[3] “ASM Handbook of Engineering Mathematics”, American Society for
Metals, 1983, pp.86-89
[4] Tuma, J.J., “Engineering Mathematics Handbook”, 3 Edition,
McGraw-Hill, pp.34-35
Spherical Trigonometry
Return to Table of Content
http://mathworld.wolfram.com/SphericalTrigonometry.html](https://image.slidesharecdn.com/sphericaltrigonometry-140929121145-phpapp02/85/Spherical-trigonometry-30-320.jpg)


The document discusses the history and development of spherical trigonometry, highlighting key mathematicians such as Menelaus, Al-Khwarizmi, and Al-Tusi. It outlines significant advancements, including the formulation of sine and cosine laws in spherical triangles and the mathematical methods used for practical applications like astronomy. The material serves as an introduction to spherical trigonometry's principles and its historical significance in mathematics.