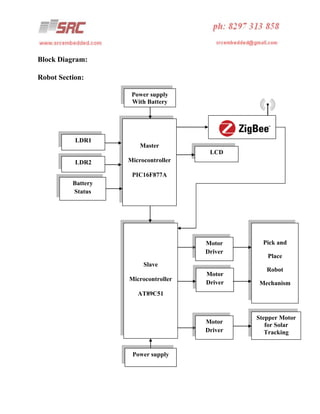
The document describes a smart microcontroller system for optimally charging batteries in a solar-powered robotic vehicle. It presents a two-part contribution: 1) a solar tracking mechanism that increases power generation regardless of the rover's mobility, and 2) an alternative battery charging design where one battery provides power while the other charges independently. The proposed system uses master and slave microcontrollers, with the master sensing light intensity to adjust the solar panel direction via stepper motor. It was tested on a robotic platform for unmanned exploration with two-fingered arms, Zigbee control, and battery status monitoring through a PC interface.