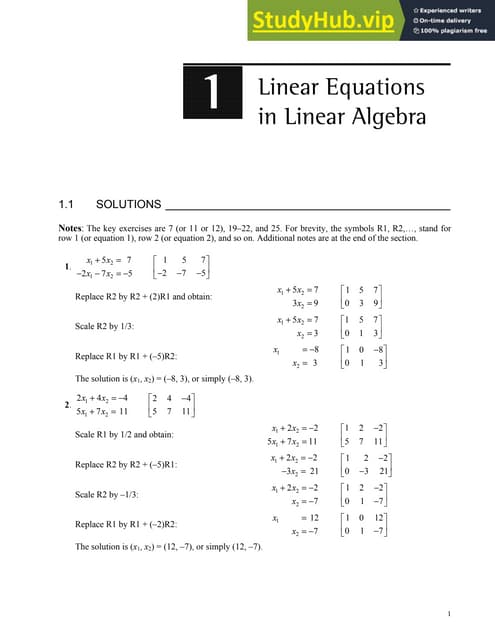
1. The document discusses bases and dimensions for vector spaces. A basis for a subspace enables visualizing the subspace as a k-dimensional hyperplane through the origin in Rn.
2. Examples are provided of determining if sets of vectors form a basis by checking if they are linearly independent. The dimension of solution spaces of homogeneous systems is also determined based on the rank of the systems.
3. Specific examples involve finding bases for solution spaces of systems of linear equations by reducing the coefficient matrices to echelon form and writing the general solutions in terms of the basis vectors.
![SECTION 4.4
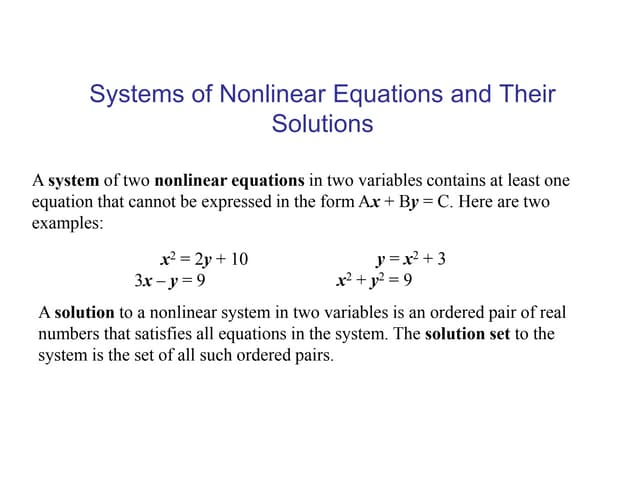
BASES AND DIMENSION FOR VECTOR SPACES
A basis {v1 , v 2 , , v k } for a subspace W of Rn enables up to visualize W as a k-dimensional
plane (or hyperplane) through the origin in Rn. In case W is the solution space of a
homogeneous linear system, a basis for W is a maximal linearly independent set of solutions of
the system, and every other solution is a linear combination of these particular solutions.
1. The vectors v1 and v2 are linearly independent (because neither is a scalar multiple of
the other) and therefore form a basis for R2.
2. We note that v2 = 2v1. Consequently the vectors v1 , v 2 , v 3 are linearly dependent, and
therefore do not form a basis for R3.
3. Any four vectors in R3 are linearly dependent, so the given vectors do not form a basis
for R3.
4. Any basis for R4 contains four vectors, so the given vectors v1 , v 2 , v 3 do not form a
basis for R4.
5. The three given vectors v1 , v 2 , v 3 all lie in the 2-dimensional subspace x1 = 0 of R3.
Therefore they are linearly dependent, and hence do not form a basis for R3.
6. Det ([ v1 v2 v 3 ]) = −1 ≠ 0, so the three vectors are linearly independent, and hence do
form a basis for R3.
7. Det ([ v1 v2 v 3 ]) = 1 ≠ 0, so the three vectors are linearly independent, and hence do
form a basis for R3.
8. Det ([ v1 v2 v3 v 4 ]) = 66 ≠ 0, so the four vectors are linearly independent, and hence
do form a basis for R4.
9. The single equation x − 2 y + 5 z = 0 is already a system in reduced echelon form, with
free variables y and z. With y = s, z = t , x = 2s − 5t we get the solution vector
( x, y , z ) = (2s − 5t , s, t ) = s (2,1, 0) + t (−5, 0,1).
Hence the plane x − 2 y + 5 z = 0 is a 2-dimensional subspace of R3 with basis consisting
of the vectors v1 = (2,1, 0) and v 2 = (−5, 0,1).](https://image.slidesharecdn.com/sect4-4-100319104244-phpapp02/85/Sect4-4-1-320.jpg)
![SECTION 4.4
BASES AND DIMENSION FOR VECTOR SPACES
A basis {v1 , v 2 , , v k } for a subspace W of Rn enables up to visualize W as a k-dimensional
plane (or hyperplane) through the origin in Rn. In case W is the solution space of a
homogeneous linear system, a basis for W is a maximal linearly independent set of solutions of
the system, and every other solution is a linear combination of these particular solutions.
1. The vectors v1 and v2 are linearly independent (because neither is a scalar multiple of
the other) and therefore form a basis for R2.
2. We note that v2 = 2v1. Consequently the vectors v1 , v 2 , v 3 are linearly dependent, and
therefore do not form a basis for R3.
3. Any four vectors in R3 are linearly dependent, so the given vectors do not form a basis
for R3.
4. Any basis for R4 contains four vectors, so the given vectors v1 , v 2 , v 3 do not form a
basis for R4.
5. The three given vectors v1 , v 2 , v 3 all lie in the 2-dimensional subspace x1 = 0 of R3.
Therefore they are linearly dependent, and hence do not form a basis for R3.
6. Det ([ v1 v2 v 3 ]) = −1 ≠ 0, so the three vectors are linearly independent, and hence do
form a basis for R3.
7. Det ([ v1 v2 v 3 ]) = 1 ≠ 0, so the three vectors are linearly independent, and hence do
form a basis for R3.
8. Det ([ v1 v2 v3 v 4 ]) = 66 ≠ 0, so the four vectors are linearly independent, and hence
do form a basis for R4.
9. The single equation x − 2 y + 5 z = 0 is already a system in reduced echelon form, with
free variables y and z. With y = s, z = t , x = 2s − 5t we get the solution vector
( x, y , z ) = (2s − 5t , s, t ) = s (2,1, 0) + t (−5, 0,1).
Hence the plane x − 2 y + 5 z = 0 is a 2-dimensional subspace of R3 with basis consisting
of the vectors v1 = (2,1, 0) and v 2 = (−5, 0,1).](https://image.slidesharecdn.com/sect4-4-100319104244-phpapp02/75/Sect4-4-1-2048.jpg)




























![Week 3 [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/week3compatibilitymode-130213164415-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)