Downloaded 78 times

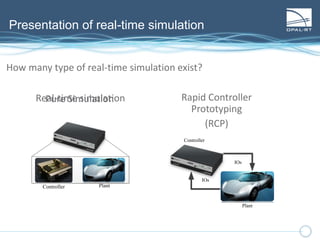
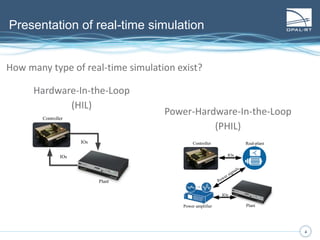
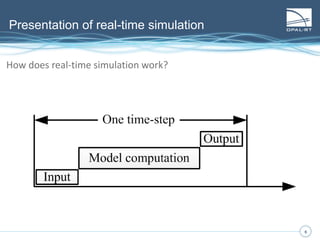
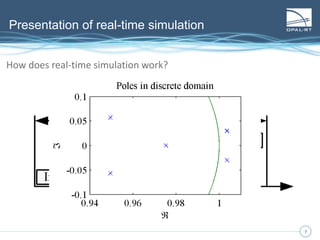
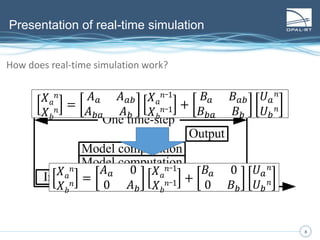
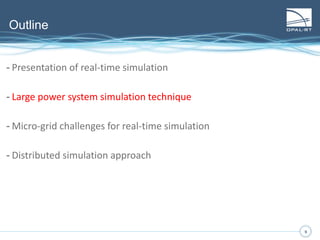
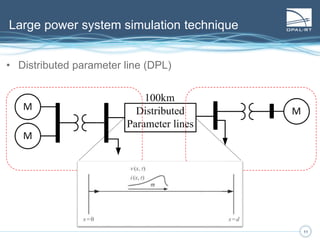
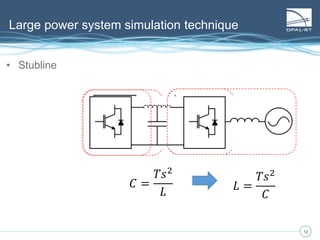
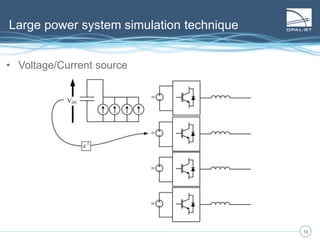
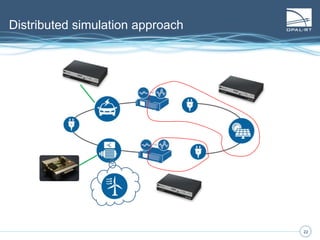
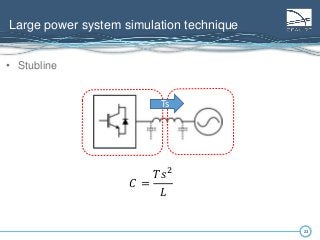
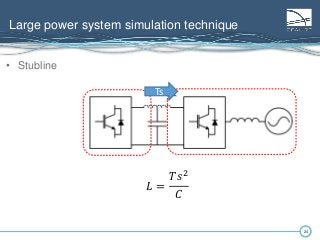
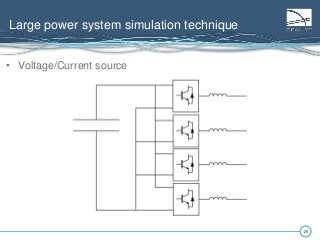
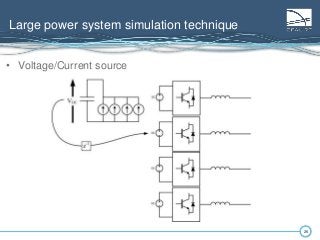
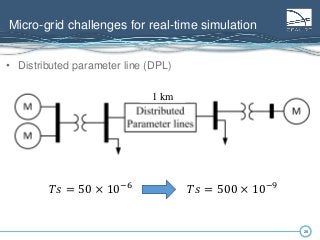
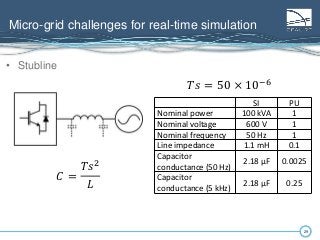
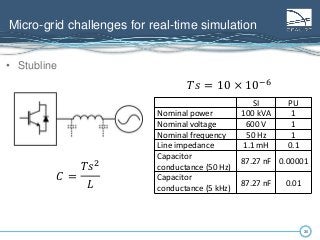
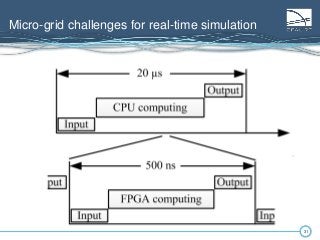
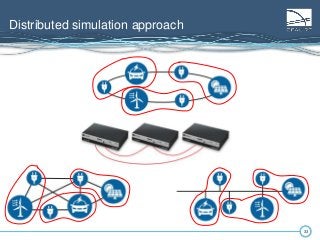
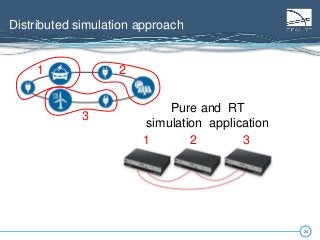
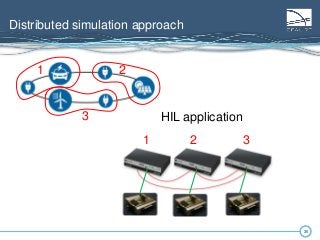
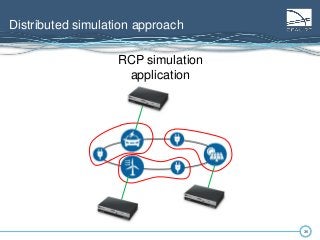
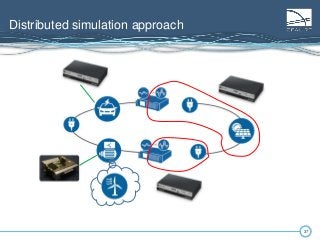

The document presents a discussion on real-time simulation techniques for micro-grid versus large power systems, highlighting various simulation types such as rapid controller prototyping and hardware-in-the-loop. It addresses the challenges faced by micro-grids during real-time simulation and outlines methodologies for large power system simulations, including specialized software and distributed approaches. The content is presented in the context of an international conference on industrial technology.































































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)








