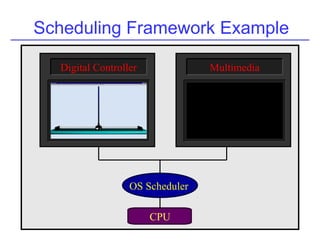
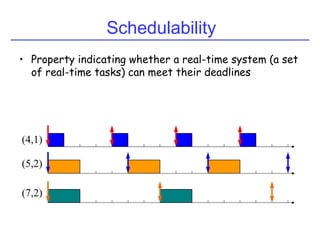
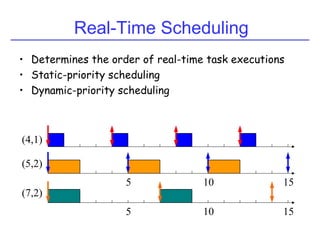
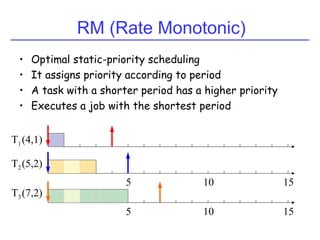
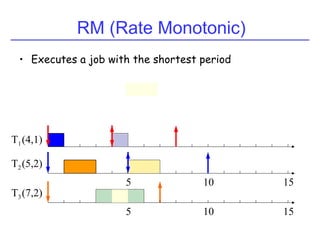
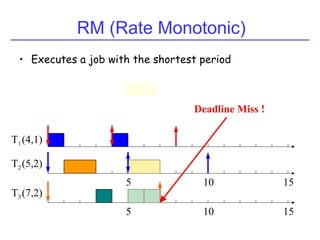
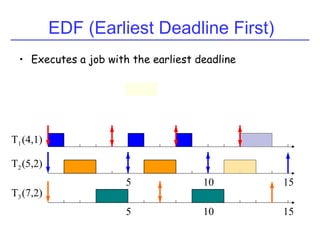
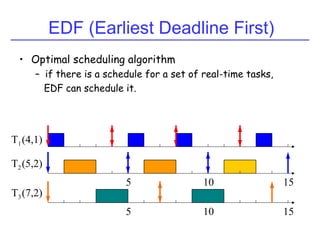
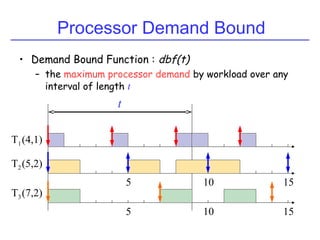
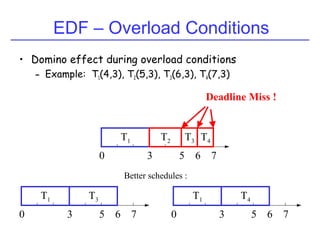
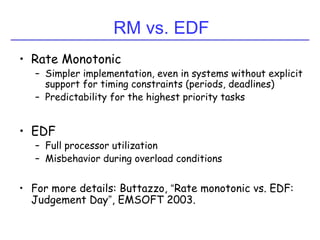
This document discusses real-time scheduling algorithms. It begins by defining real-time systems and their key properties of timeliness and predictability. It then discusses two common real-time scheduling algorithms: fixed-priority Rate Monotonic scheduling and dynamic-priority Earliest Deadline First scheduling. It covers how each algorithm prioritizes and orders tasks, and analyzes their schedulability and utilization bounds. It concludes by comparing the two approaches.



![Response Time
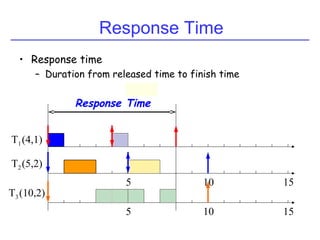
• Response Time (ri) [Audsley et al., 1993]
• HP(Ti) : a set of higher-priority tasks than Ti
(4,1)
(5,2)
(10,2)
k
THPT k
i
ii e
p
r
er
ik
⋅
+= ∑∈ )(
5
5
10
10
T1
T2
T3](https://image.slidesharecdn.com/192-180618081138/85/Real-Time-Scheduling-18-320.jpg)







































































![谷歌留痕技术教程[ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130173900-2eb784f9-thumbnail.jpg?width=640&height=640&fit=bounds)
















