Download as PDF, PPTX



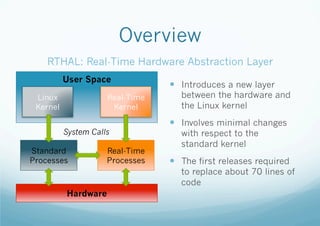





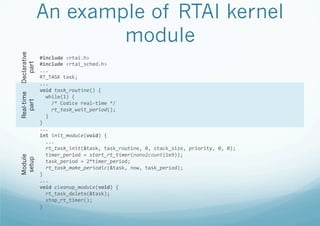














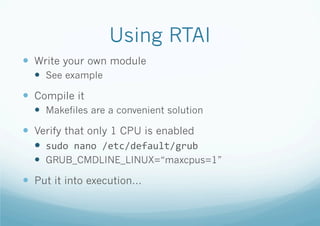


The document provides an overview of the Real-Time Application Interface (RTAI) and its implementation in Linux, focusing on the architecture, components, and scheduling policies like Earliest Deadline First (EDF) and Rate Monotonic (RM). It describes the Real-Time Hardware Abstraction Layer (RTHAL) and its evolution into the Adaptive Domain Environment for Operating Systems (ADEOS), as well as inter-process communication mechanisms available for real-time tasks. Additionally, it outlines steps to install RTAI on a Linux system and sample code for creating real-time tasks.