Downloaded 23 times
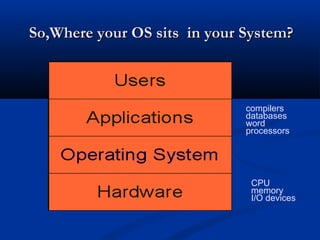




The document provides an introduction to operating systems and real-time operating systems (RTOS). It defines an operating system as software that manages computer resources and provides common services for programs. An RTOS is designed for systems where response time is critical. The document discusses the components, features and types of both operating systems and RTOS, including examples like VxWorks and QNX.

























![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)





































