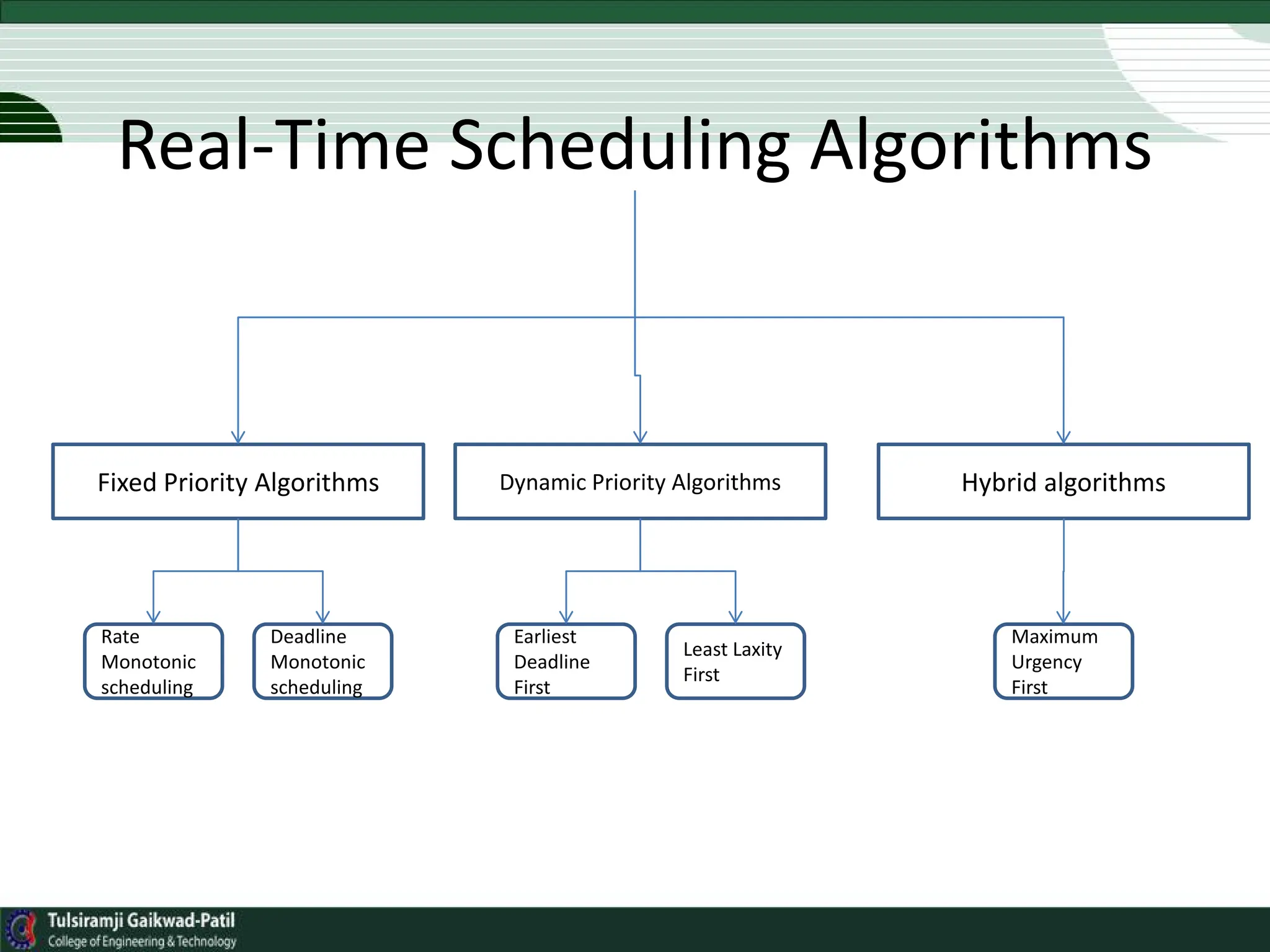
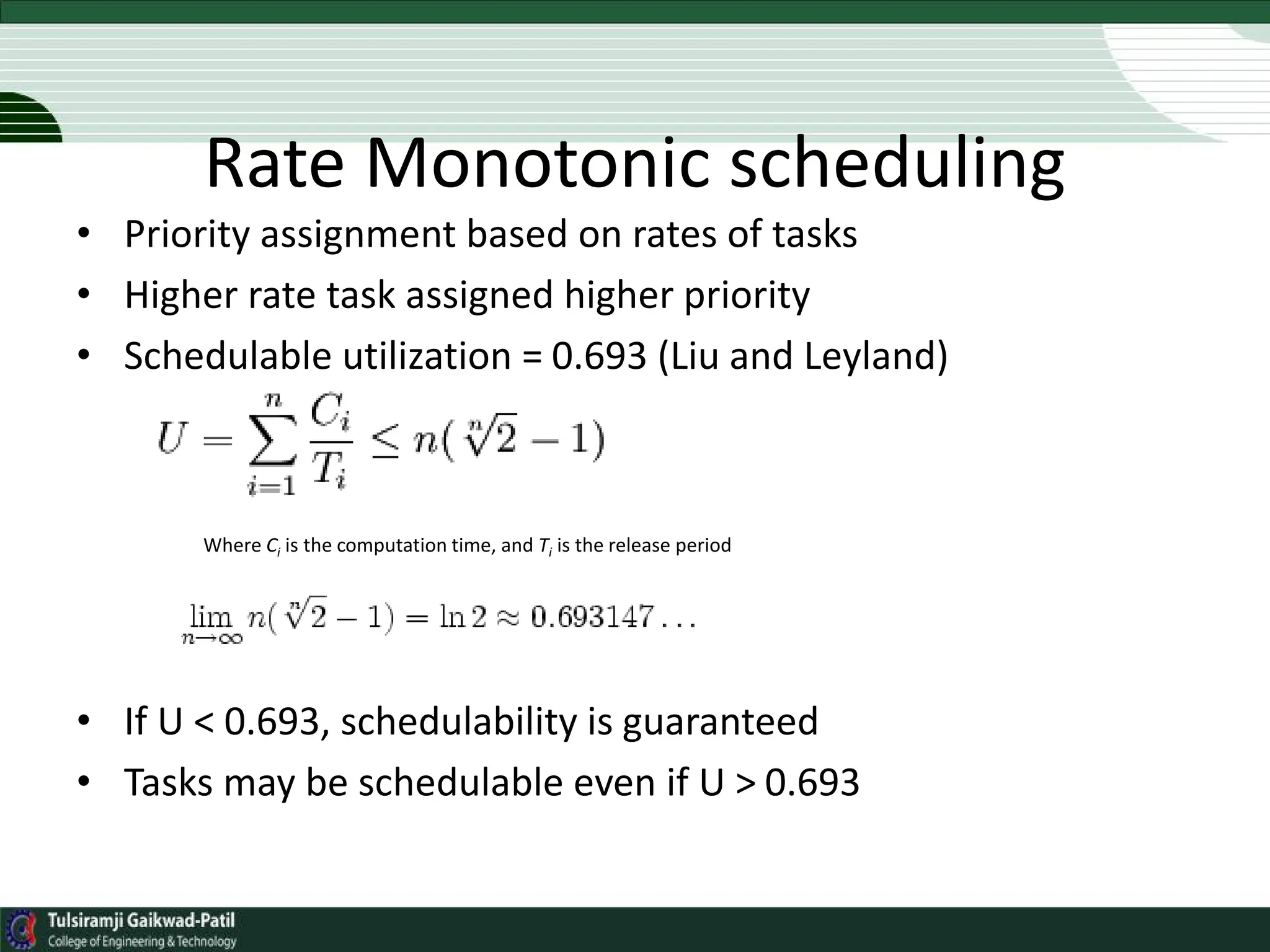
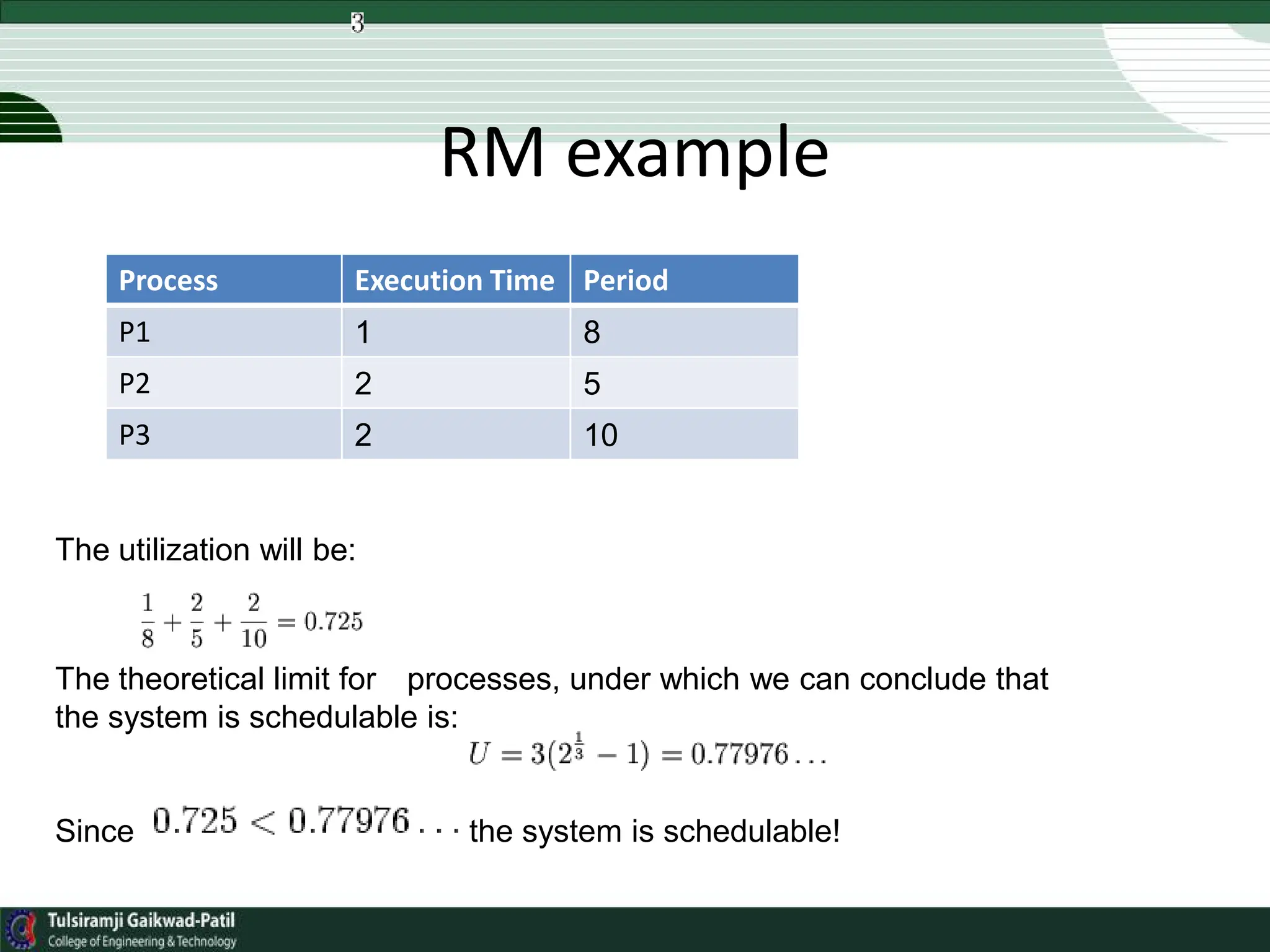
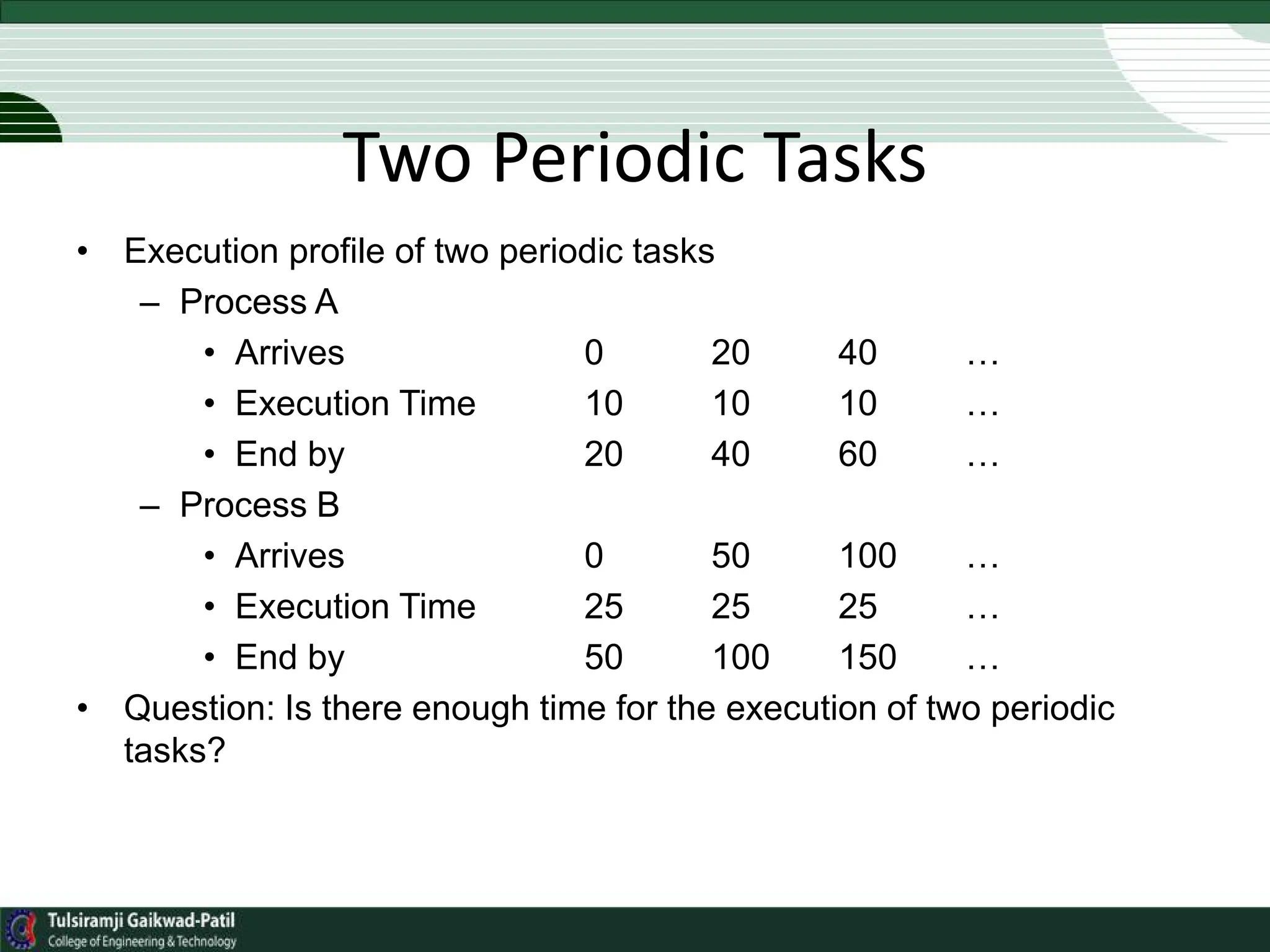
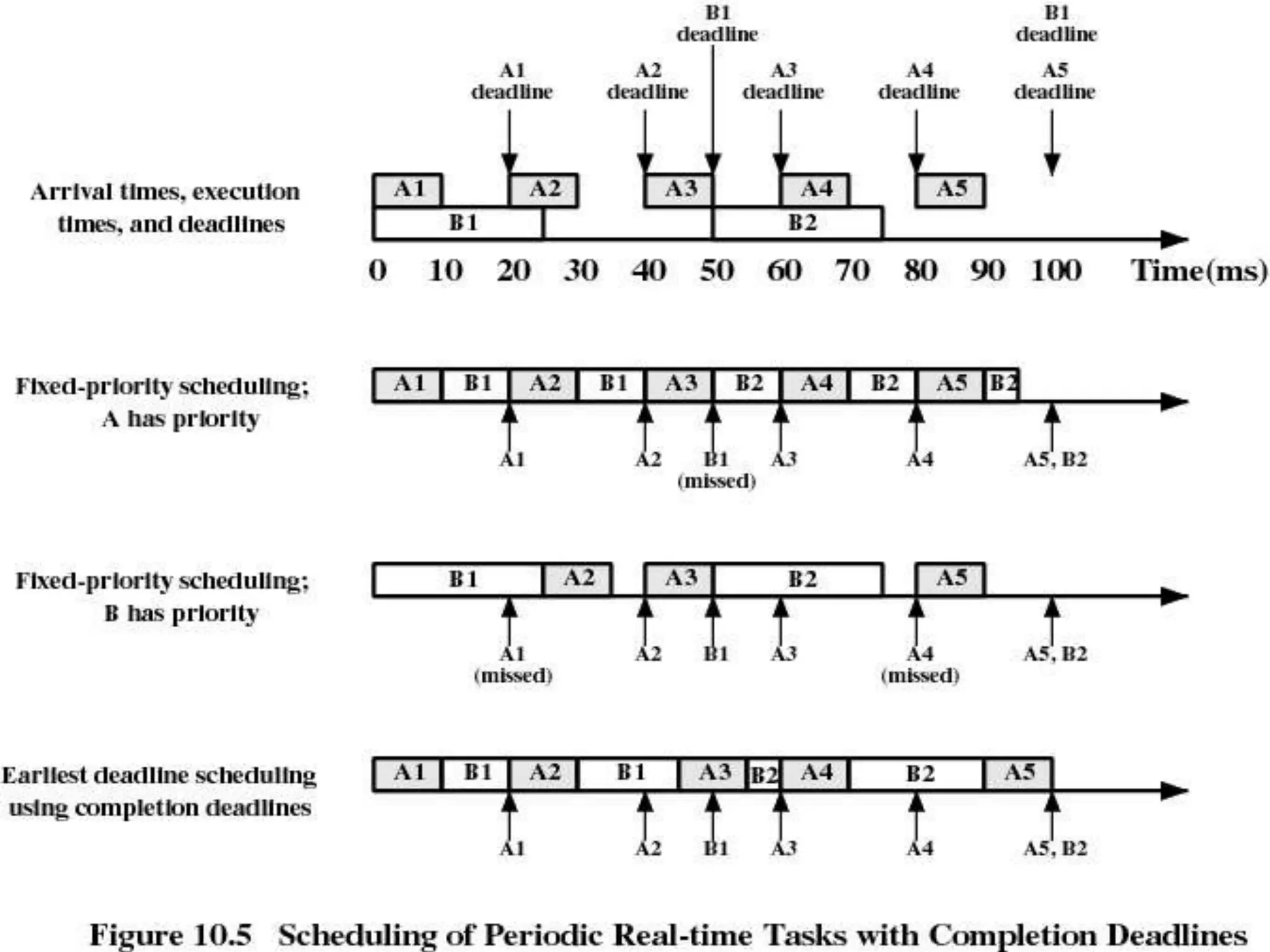
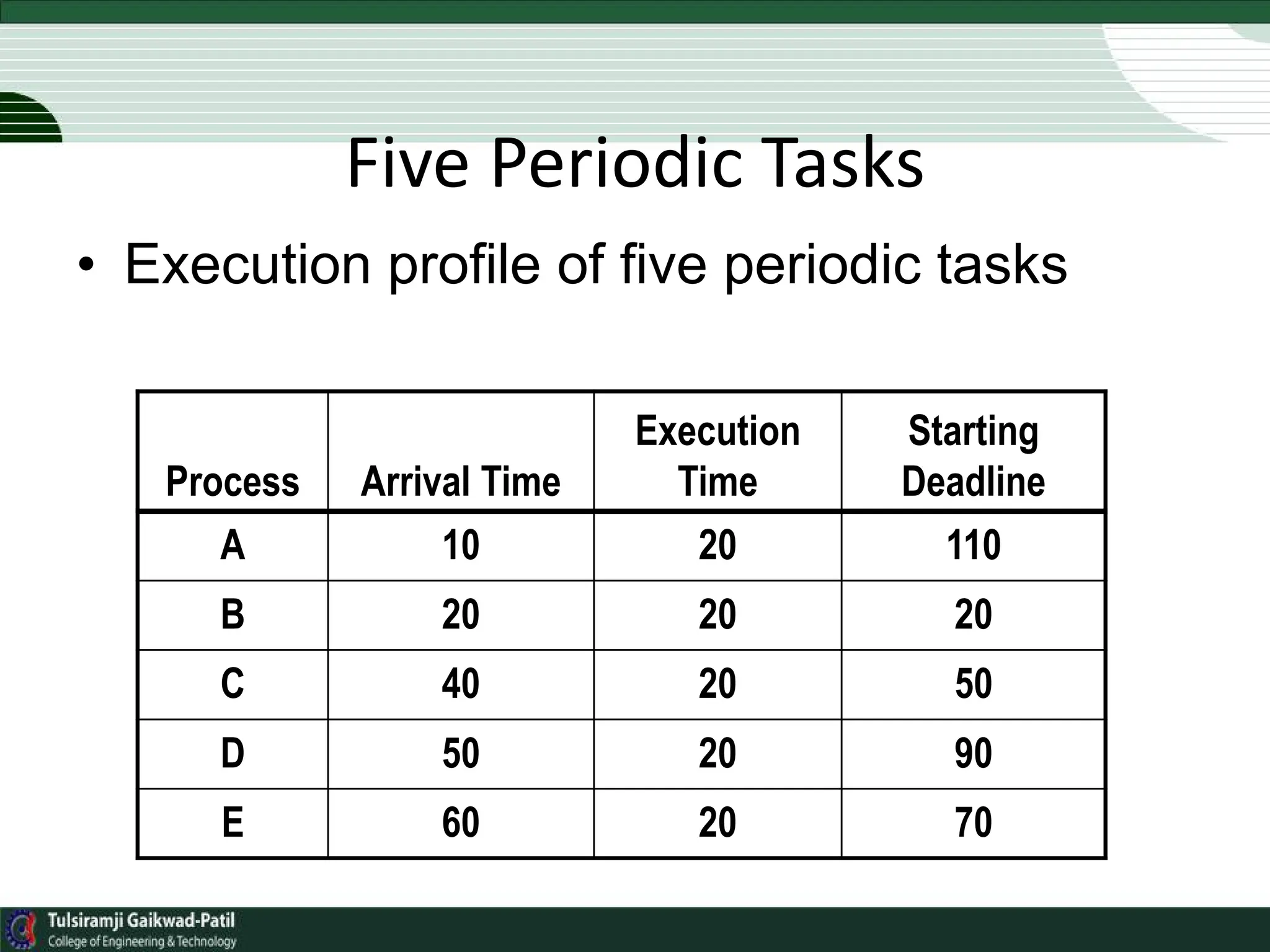
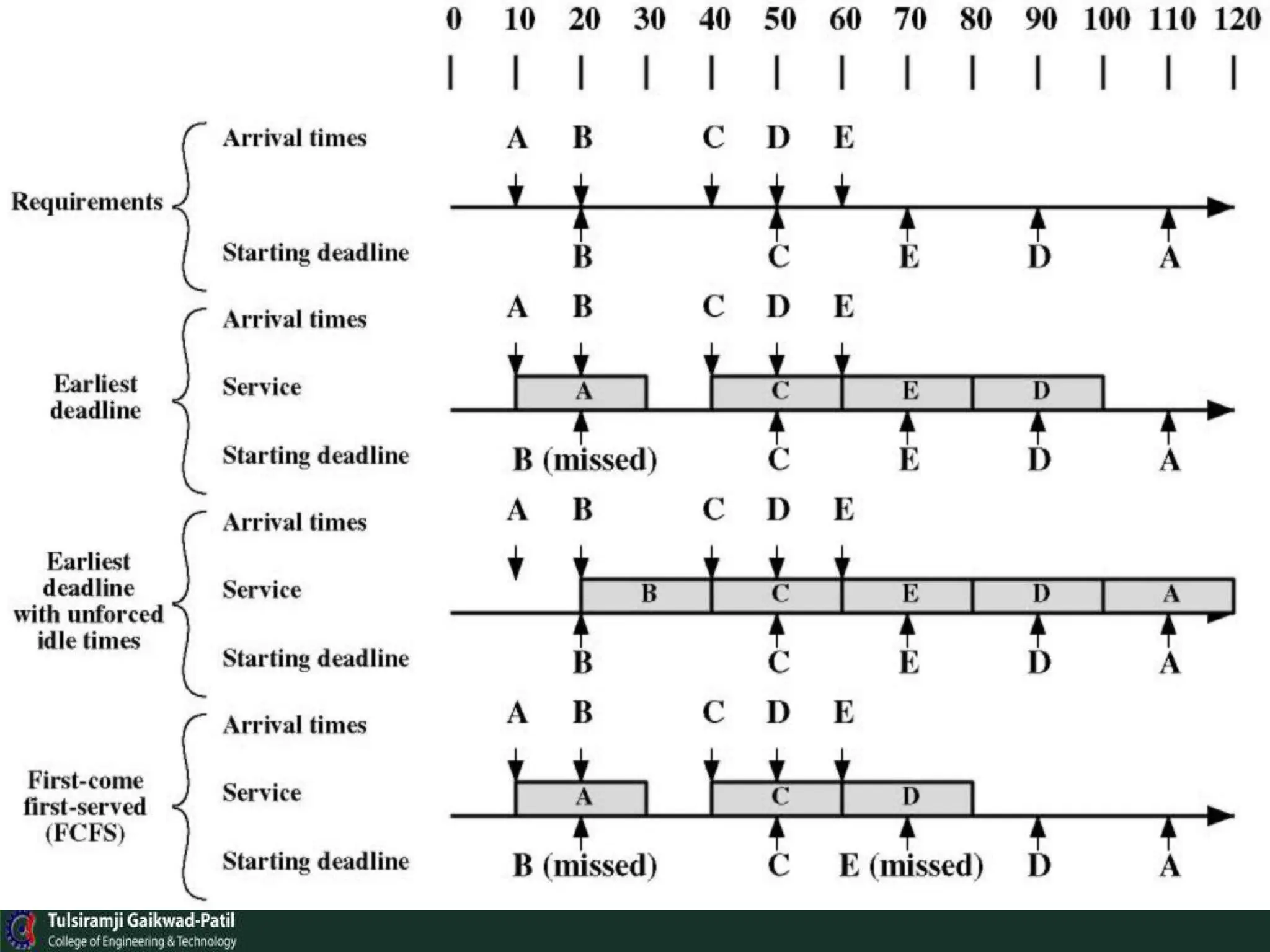
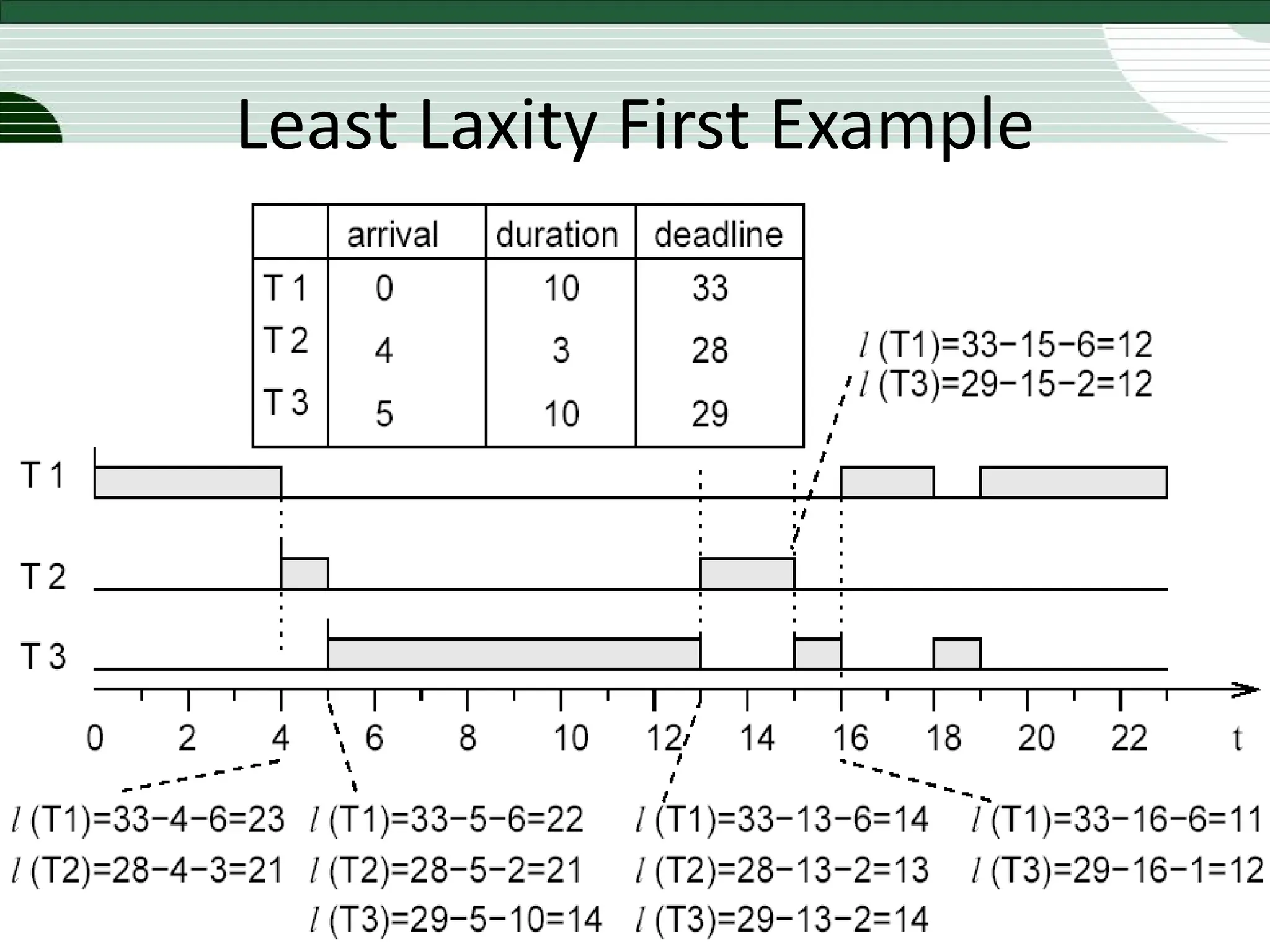
This document contains information about real-time operating systems and scheduling algorithms. It discusses the architecture of real-time systems, including hard and soft real-time systems. It also covers common task categories and why scheduling is needed. The document then summarizes several important scheduling algorithms for real-time systems, including rate monotonic, deadline monotonic, earliest deadline first, least laxity first, and maximum urgency first. It provides examples and explanations of how each algorithm works.