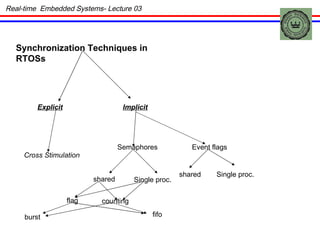
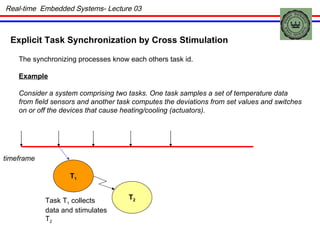
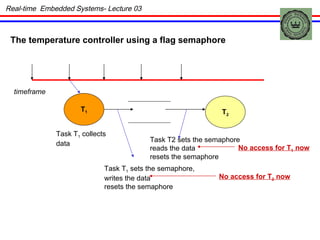
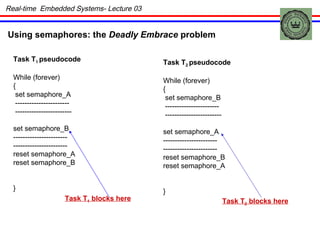
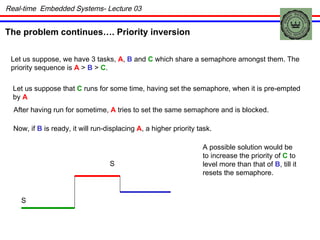
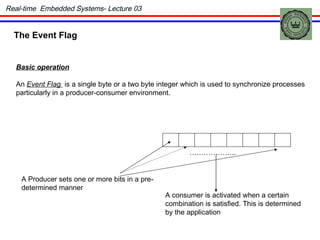
The document discusses synchronization techniques used in real-time operating systems (RTOS), including explicit synchronization through cross stimulation, semaphores, event flags, and issues like priority inversion and deadly embrace. It covers how semaphores work as flags or counting semaphores for synchronization between tasks. Multi-processor support using shared synchronization structures in global memory is also discussed.