Downloaded 122 times
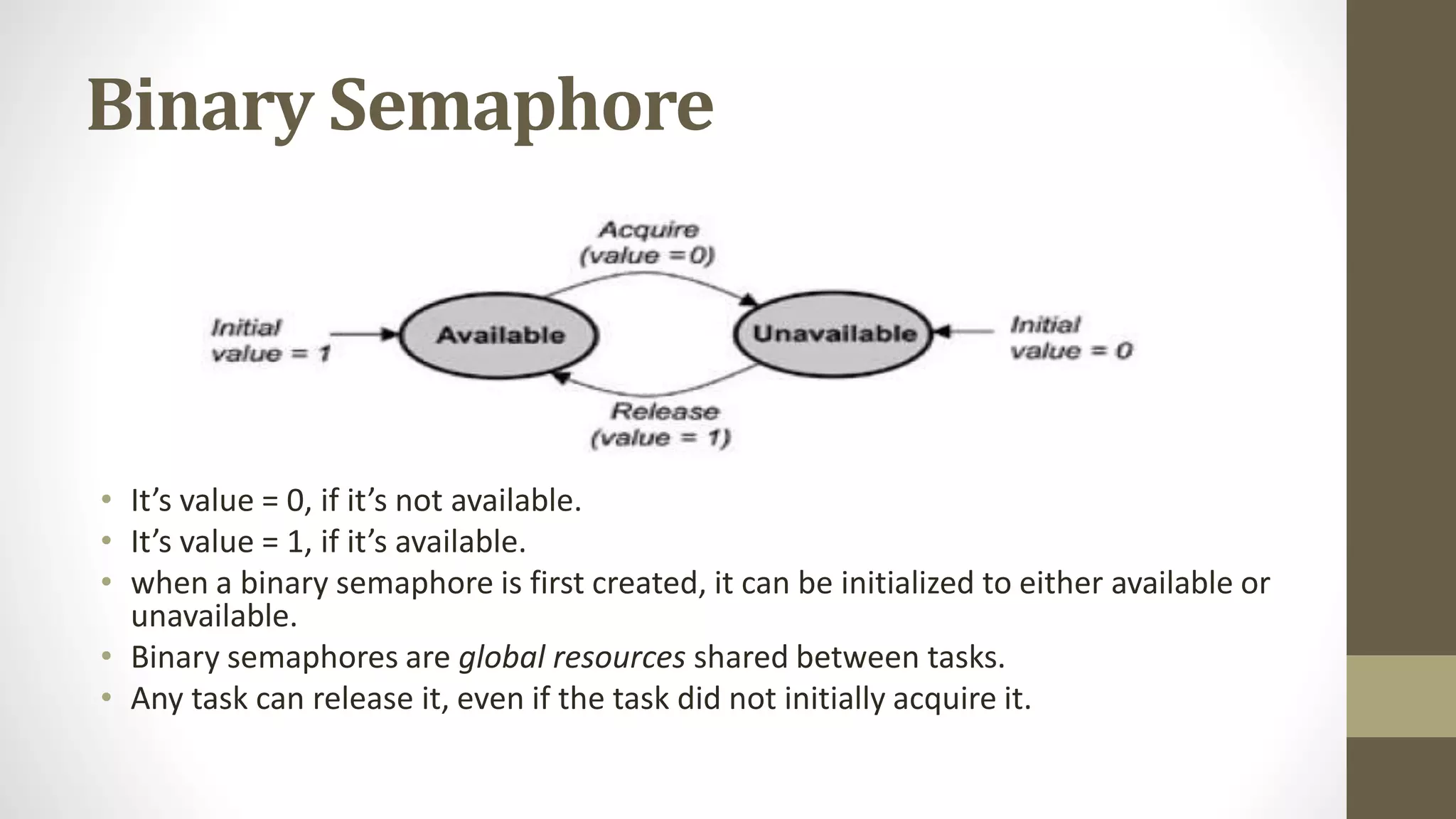
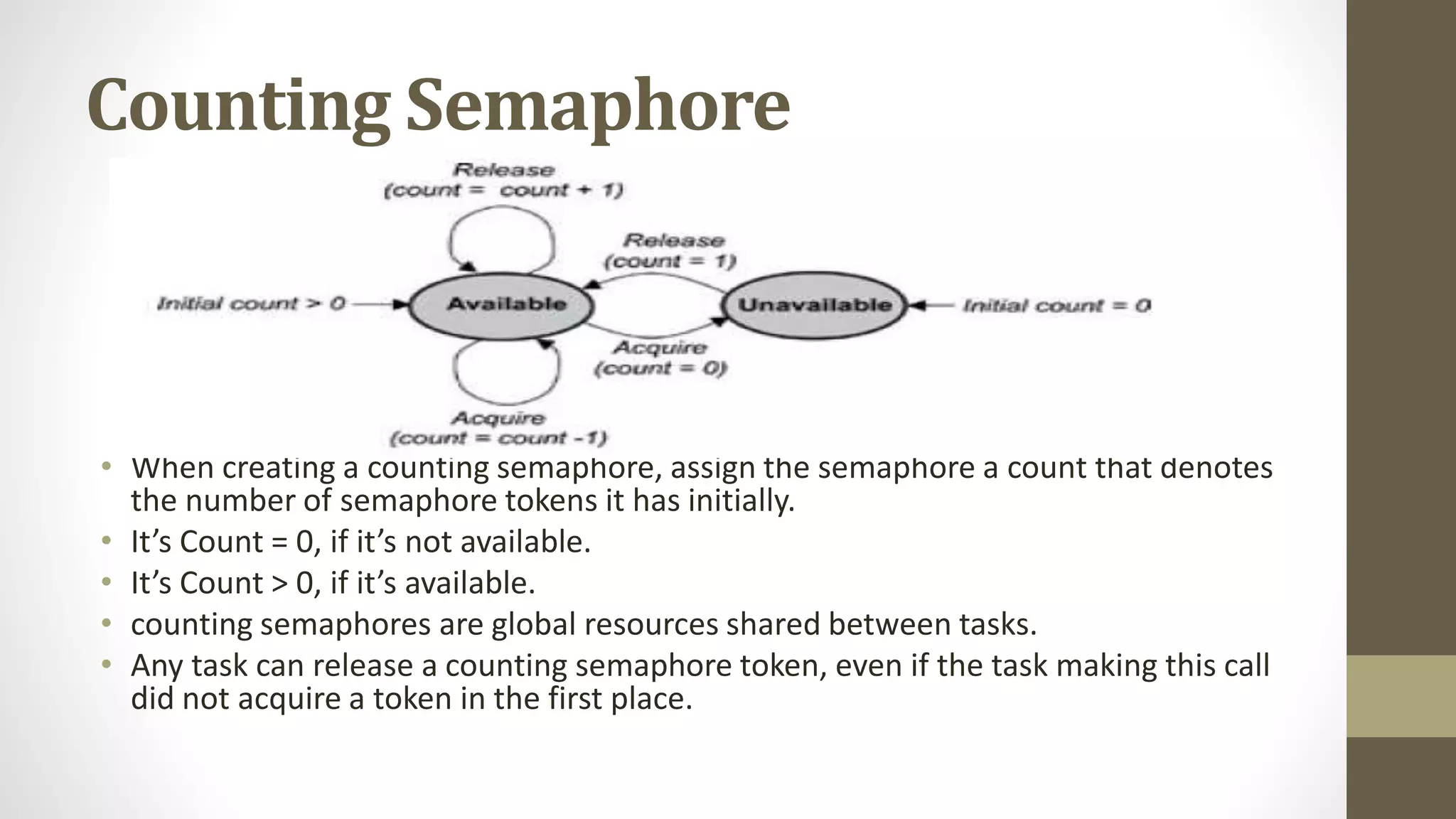
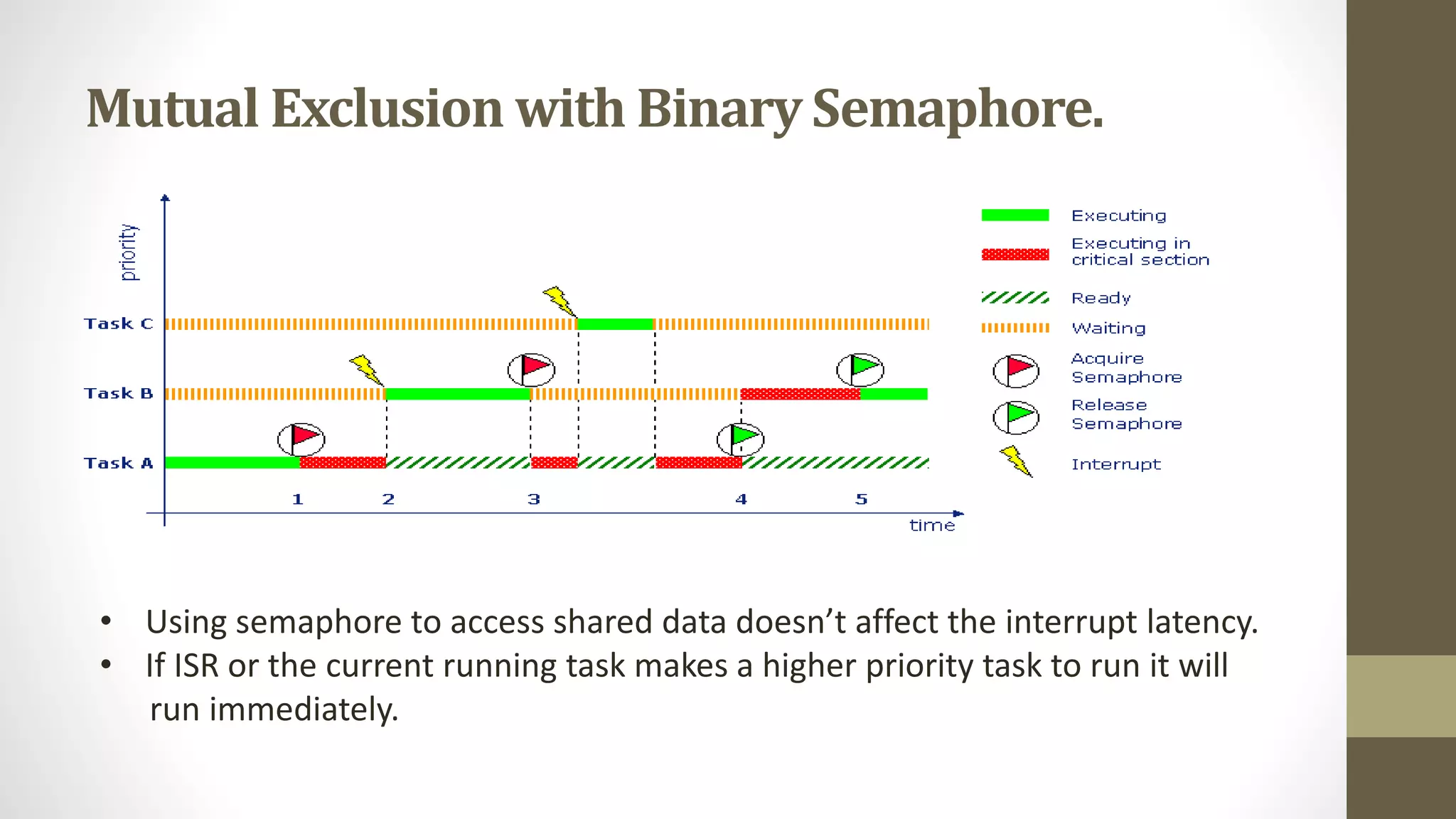
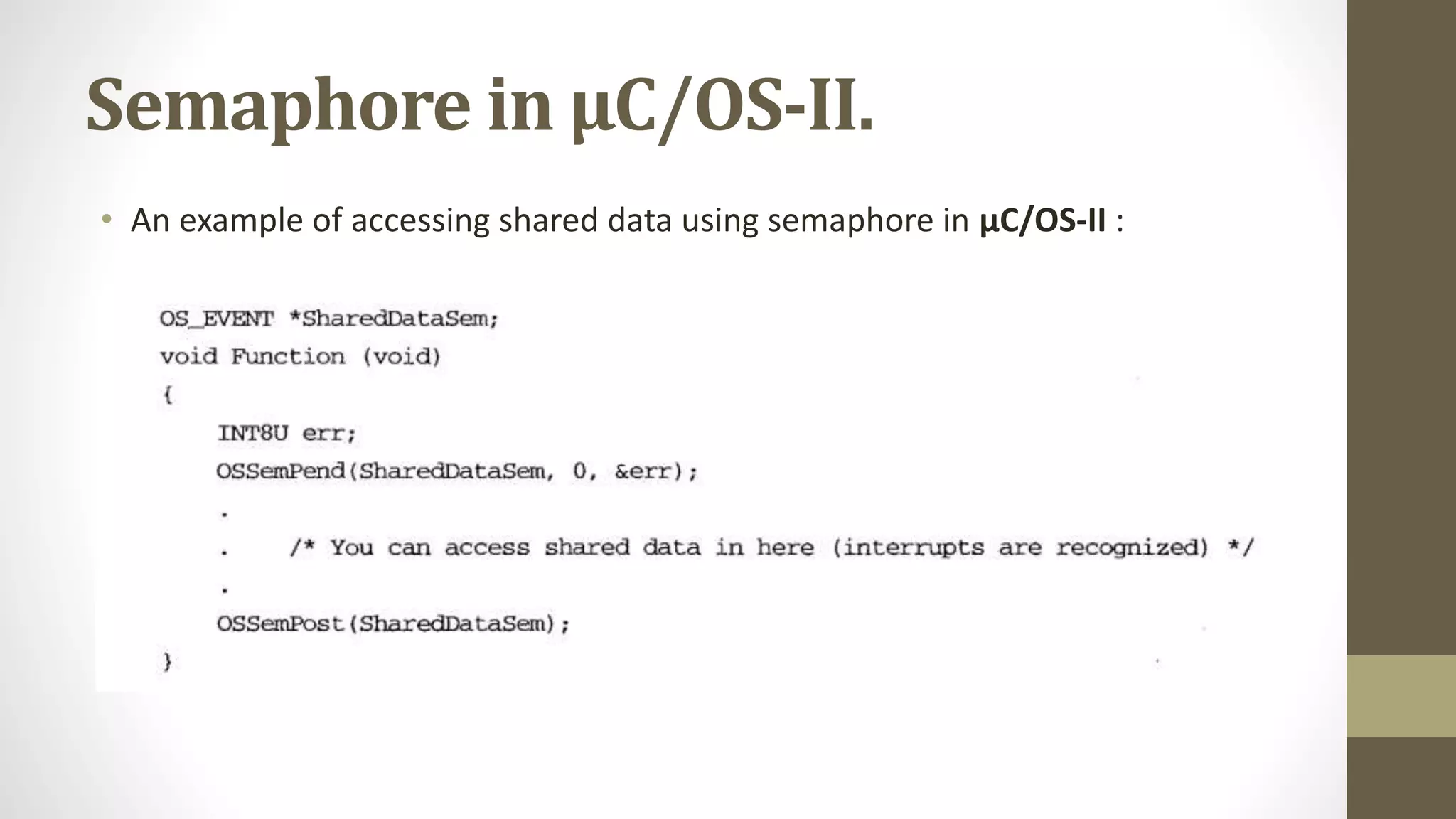

The document outlines key concepts of real-time operating systems (RTOS), particularly focusing on semaphores, including binary and counting semaphores, and their role in mutual exclusion. It discusses how semaphores work in the μc/os-ii environment, addresses the issue of deadlock and prevention methods, and provides references for further reading. The content is intended for understanding semaphore types and their application in task management within RTOS.