Download to read offline

![ int timer = 100; void loop() {
int ledPins[] = { for (int thisPin = 0; thisPin <
11, 12, 13, 6, 5, 3 }; pinCount; thisPin++) {
int pinCount = 6; digitalWrite(ledPins[thisPin],
void setup() { HIGH);
int thisPin; delay(timer);
for (int thisPin = 0; thisPin < digitalWrite(ledPins[thisPin],
pinCount; thisPin++) { LOW);
pinMode(ledPins[thisPin], }
OUTPUT); for (int thisPin = pinCount - 1;
} thisPin >= 0; thisPin--) {
}
digitalWrite(ledPins[thisPin],
HIGH);
delay(timer);
digitalWrite(ledPins[thisPin],
LOW);
}
}](https://image.slidesharecdn.com/r-tist-121206131722-phpapp02/85/R-tist-3-320.jpg)







![ void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
// Arduino pin: 2,3,4,5,6,7,8 pinMode(4, OUTPUT);
byte seven_seg_digits[10][7] = { { pinMode(5, OUTPUT);
1,1,1,1,1,1,0 }, // = 0 pinMode(6, OUTPUT);
{ 0,1,1,0,0,0,0 }, // = 1 pinMode(7, OUTPUT);
{ 1,1,0,1,1,0,1 }, // = 2 pinMode(8, OUTPUT);
{ 1,1,1,1,0,0,1 }, // = 3 pinMode(9, OUTPUT);
{ 0,1,1,0,0,1,1 }, // = 4 writeDot(0); // start with the "dot" off
{ 1,0,1,1,0,1,1 }, // = 5 }
{ 1,0,1,1,1,1,1 }, // = 6
{ 1,1,1,0,0,0,0 }, // = 7 void writeDot(byte dot) {
{ 1,1,1,1,1,1,1 }, // = 8 digitalWrite(9, dot);
{ 1,1,1,0,0,1,1 } // = 9 }
};
](https://image.slidesharecdn.com/r-tist-121206131722-phpapp02/85/R-tist-11-320.jpg)
![ Void
sevenSegWrite(byte void loop() {
digit) { for (byte count = 10;
byte pin = 2; count > 0; --count) {
for (byte segCount = 0; delay(1000);
segCount < 7; sevenSegWrite(count
++segCount) { - 1);
digitalWrite(pin, }
seven_seg_digits[digit][ delay(4000);
segCount]); }
++pin;
}
}](https://image.slidesharecdn.com/r-tist-121206131722-phpapp02/85/R-tist-12-320.jpg)




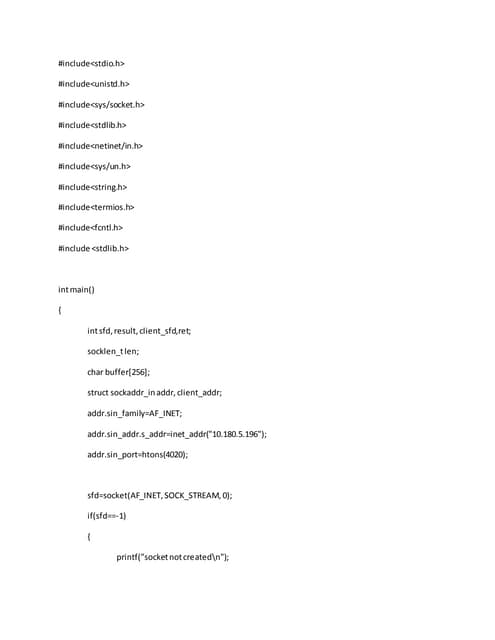
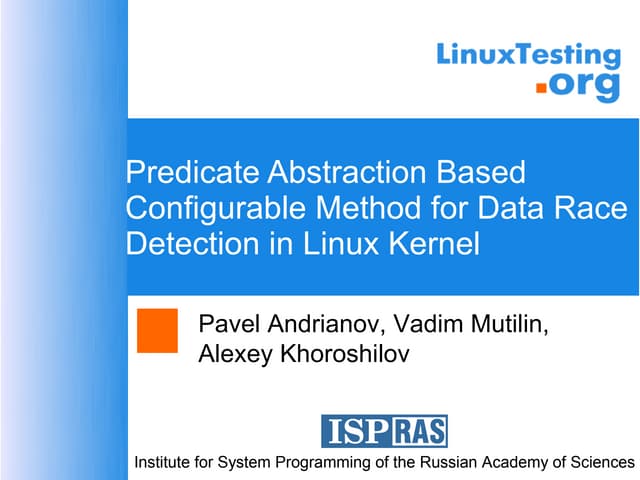
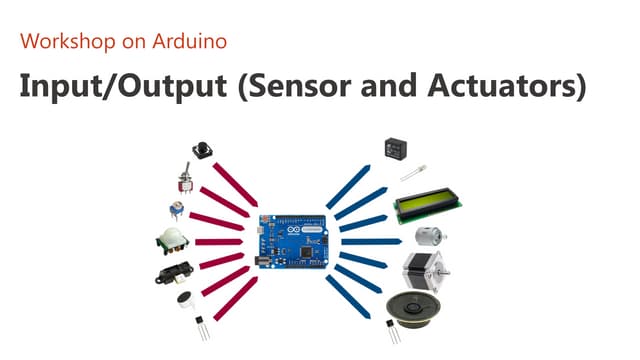
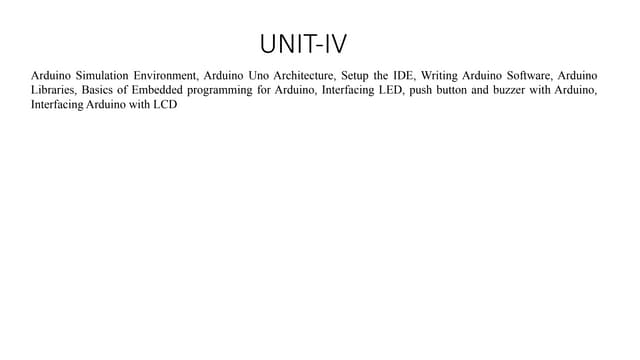
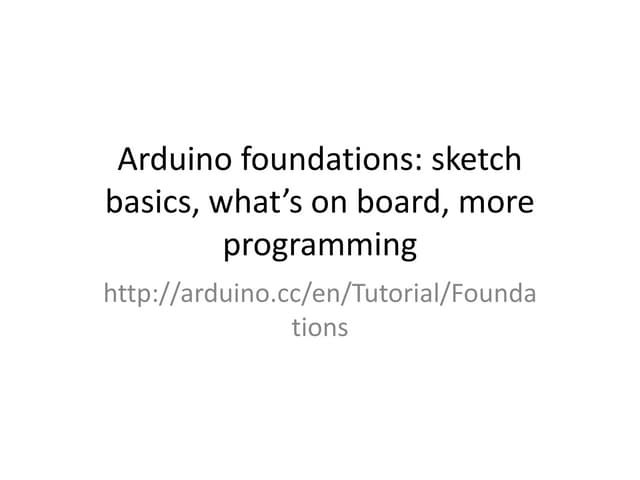
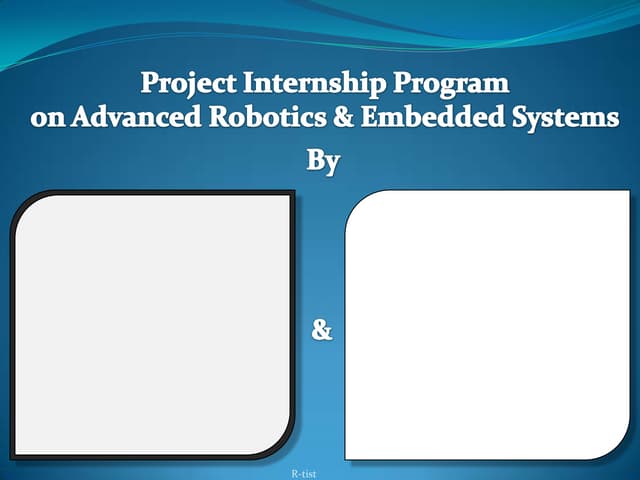
The document describes several Arduino sketches. The first sketch uses an array of pin numbers to light up LEDs in sequence using a for loop. The second sketch uses an LM35 sensor to read temperature values from analog pin A0 and print them to the serial monitor. The third sketch stores the on/off patterns for the segments of a 7-segment display in an array and uses it to display counting from 10 to 0 on the display. The fourth sketch reads an analog temperature sensor value and writes it simultaneously to three PWM pins to control the brightness of three LEDs based on the temperature.









![[FT-11][suhorng] “Poor Man's” Undergraduate Compilers](https://cdn.slidesharecdn.com/ss_thumbnails/poormansundergraduatecompilers-140421081114-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)