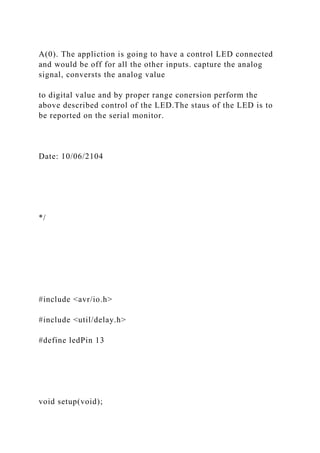
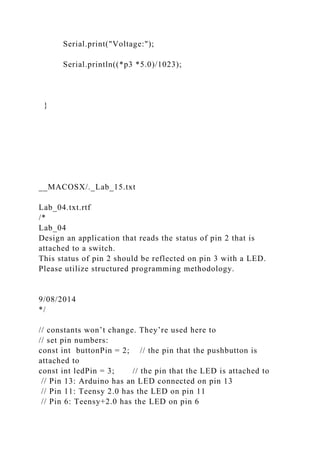
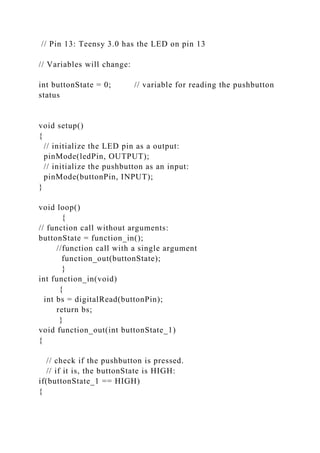
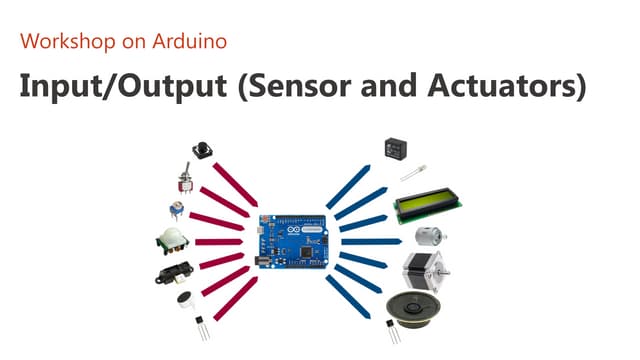
The document summarizes a series of labs focused on designing applications for reading button states and controlling LEDs using structured programming in Arduino. Each lab, from lab 3 to lab 16, specifies the setup for different functionalities like responding to button presses, converting analog signals, and displaying temperature in Fahrenheit and Celsius. The examples include various programming practices like function declarations and looping structures tailored for specific input/output operations.