Downloaded 18 times
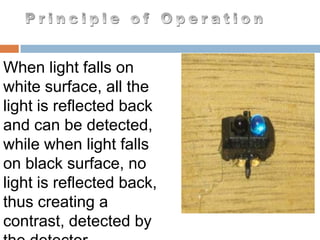
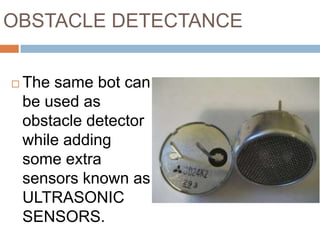
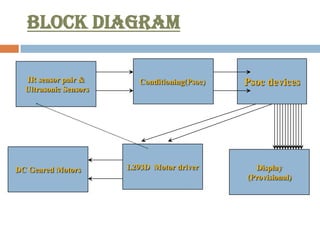

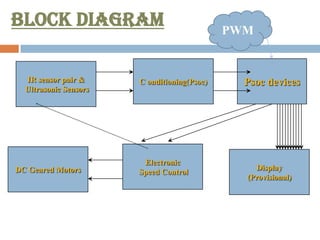

This document discusses two robotics projects: a line follower robot that can also detect obstacles using IR and ultrasonic sensors, and a flying robot. The line follower uses IR sensors to detect the contrast between black and white surfaces to follow a line, and ultrasonic sensors are added to enable obstacle detection. A block diagram shows the IR sensors, ultrasonic sensors, PSoC conditioning, motor driver, and display. The flying robot uses a four rotor design with PWM for motion control and synchronization. It also includes IR sensors, PSoC, motor control, and display in its block diagram. Potential applications discussed are surveillance, data acquisition, image processing, and integrating additional technologies like Wi-Fi, IP cameras, and GPS.































































