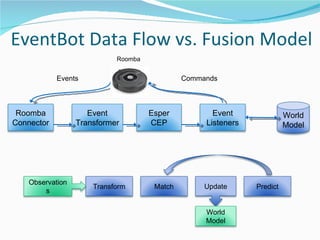
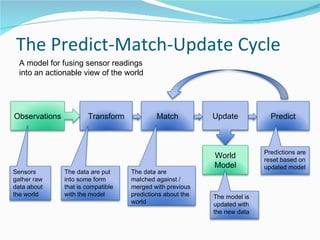
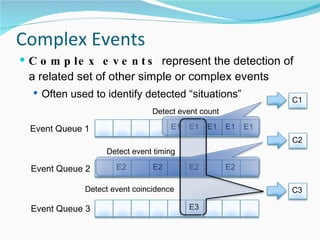
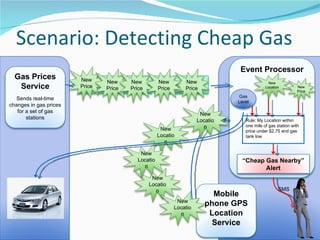
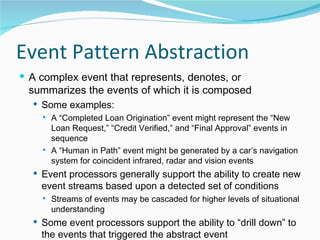
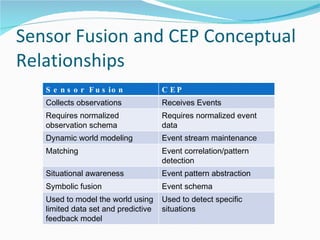
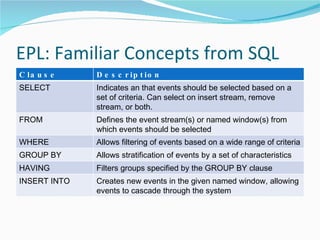
The document outlines key concepts in sensor fusion and complex event processing (CEP) relevant to robotics, emphasizing the need for integrating diverse sensory data to improve situational awareness and decision-making. It introduces principles for dynamic world modeling, the predict-match-update cycle for fusing sensor readings, and contrasts service-oriented architecture with event-driven architecture in software development. Additionally, it presents the Esper CEP engine as a robust open-source tool for real-time event processing and provides examples of event patterns and queries using its event processing language.
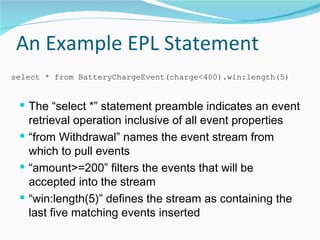
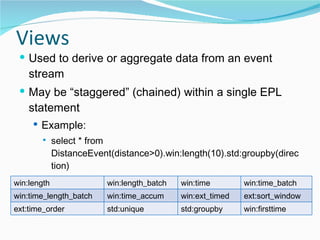
![Event Streams Defined by EPL statement FROM clause, and may be one of two types: filter or pattern Filter-based event streams apply constraints to incoming events, limiting stream content Example: select * from DistanceEvent(distance>0).win:length(10) Supports standard comparators (=, !=, >, <, >=, <=) and ranges (between, in, not) Pattern-based event streams look for the specified pattern of events Example: select * from pattern [every left=LeftBumpEvent or every right=RightBumpEvent].win:time(5 sec)](https://image.slidesharecdn.com/roombasensorfusion-100110140327-phpapp01/85/Open-Source-Event-Processing-for-Sensor-Fusion-Applications-24-320.jpg)