Download to read offline


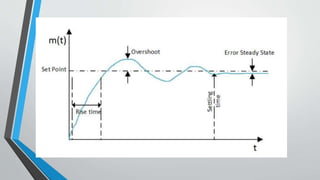
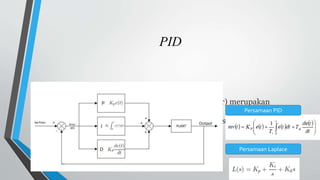



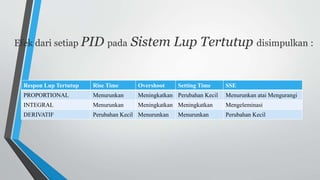






Dokumen ini menjelaskan tentang kontrol PID (proportional-integral-derivative), yang pertama kali dikembangkan pada tahun 1911 dan mengalami banyak perkembangan hingga kini. Kontrol PID terdiri dari tiga elemen utama yang berfungsi untuk meningkatkan akurasi dan stabilitas sistem kontrol, serta mengatasi error steady state. Kontrol ini sangat penting dalam aplikasi industri untuk mencapai hasil yang diinginkan melalui sistem pengendalian yang efektif.










































































![Modul Ajar Kurikulum Berbasis Cinta (KBC) Fikih Kelas 9 [modulguruku.com]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkurikulumberbasiscintakbcfikihkelas9modulguruku-260105160908-b9897ca4-thumbnail.jpg?width=640&height=640&fit=bounds)







