Downloaded 40 times





![Sistem Statik
dan Sistem
Dinamik
Sistem Statik (memoryless)
Output pada setiap saat hanya
tergantung input pada saat yang sama
Tidak tergantung input pada saat
yang lalu atau saat yang akan datang
Contoh :
Rangkaian listrik yang terdiri dari
beberapa resistor sebagai elemen
rangkaiannya.
)()()(
)()(
3
nxbnxnny
nxany
]),([)( nnxTny ](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-7-2048.jpg)





![Sistem Linier
dan Sistem
Nonlinier
Sistem linier adalah sistem yang memenuhi
hukum superposisi. Prinsip superposisi
adalah respons sistem (keluaran) terhadap
jumlah bobot sinyal akan sama dengan
jumlah bobot yang sesuai dari respon
(keluaran) sistem terhadap masing-masing
sinyal masukan individual.
Teorema : Sistem adalah linier jika dan
hanya jika
G[a1x1(t) + a2x2(t)] = a1 G[x1(t)] + a2G[x2(t)]
untuk setiap deret masukan x1(t) dan x2(t)
yang berubah-ubah dan setiap konstanta a1
dan a2 yang berubah-ubah.](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-13-2048.jpg)
![Sistem Linier
dan Sistem
Nonlinier
+
x1(n)
x2(n)
y1(n)
a1
a2
T
)]()([)( 22111 nxanxaTny
+
x1(n)
x2(n)
y2(n)
a1
a2
T
T
)]([)]([)( 22112 nxTanxTany
)()( 21 nyny Linier](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-14-2048.jpg)
( nxTny
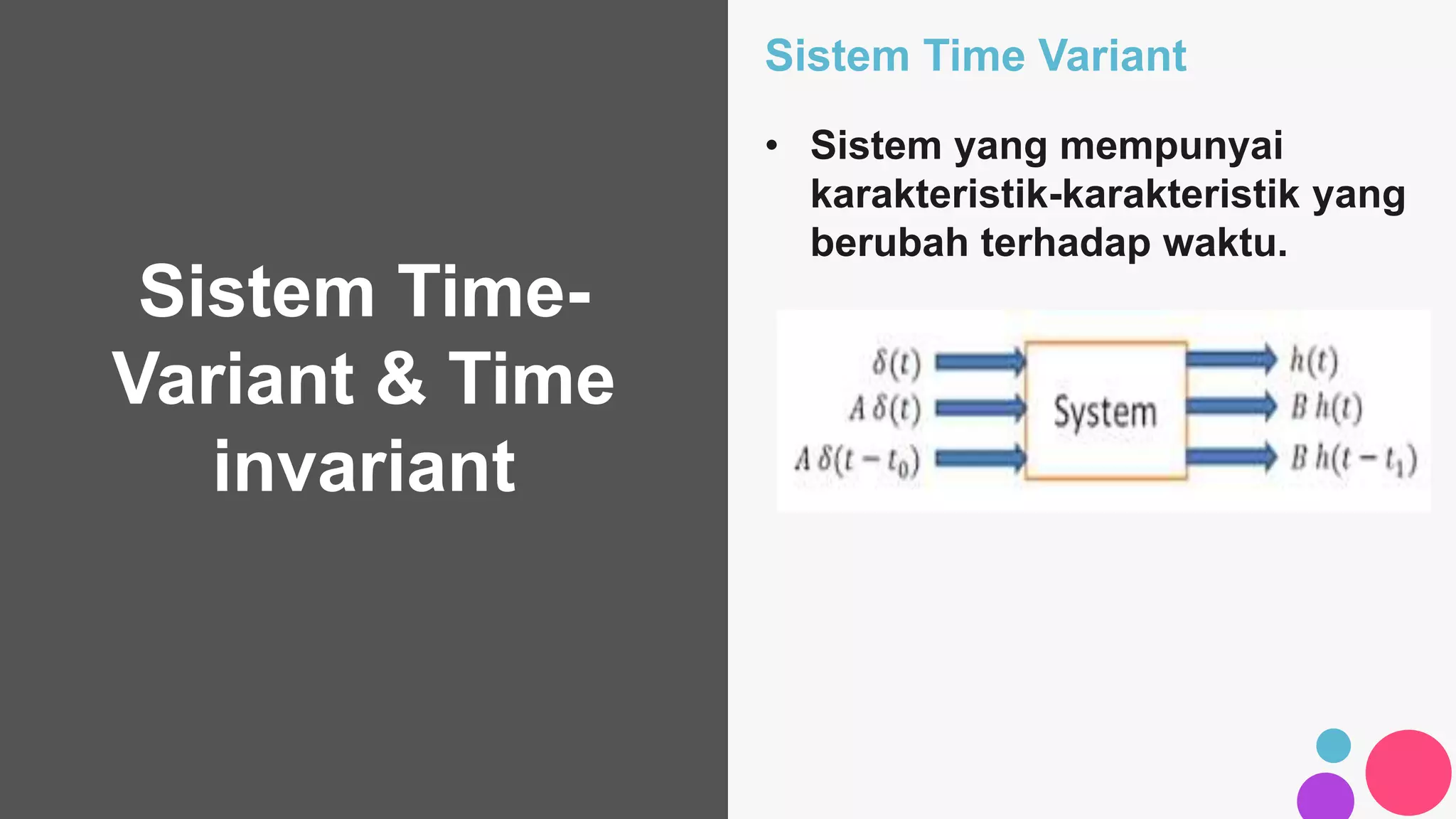
Time-invariant
Time-variant
)]([)( knxTkny
)]([),( knxTkny
)(),( knykny
)(),( knykny
Umumnya :](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-18-2048.jpg)
,(
)()]([)(
knkxknnxknxknkny
knnxknxTkny
nnxnxTny
)(),( knykny Time-variant](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-19-2048.jpg)
(
)()]([),(
)()]([)(
knxknxkny
knxknxTkny
nxnxTny
Time-variant
T
y(n) =
x(-n)x(n) Folder
)(),( knykny ](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-20-2048.jpg)
()(
)cos()()]([),(
)cos()()]([)(
knknxkny
nknxknxTkny
nnxnxTny
o
o
o
Time-variant)(),( knykny
x
cos(on)
x(n) y(n) =
x(n)cos(on)
Modulato
r](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-21-2048.jpg)

,(
)1()()]([)(
knxknxkny
knxknxknxTkny
nxnxnxTny
Jawab :
)(),( knykny Time-invariant](https://image.slidesharecdn.com/kelompok1sifat-sifatsistem-170517020830/75/sifat-sifat-sistem-23-2048.jpg)




Dokumen ini membahas konsep sinyal dan sistem, termasuk berbagai definisi dan klasifikasi sifat-sifat sistem seperti sistem statik vs dinamik, sistem linier vs nonlinier, dan sistem deterministik vs stokastik. Setiap kategori memiliki karakteristik dan contoh yang menjelaskan perbedaan serta aplikasinya dalam konteks teknik. Penjelasan juga mencakup sistem time-variant dan time-invariant serta sistem parameter berkumpul dan distribusi.















































![Perbedaan sistem linier_dan_non_linier[1]](https://cdn.slidesharecdn.com/ss_thumbnails/perbedaansistemlinierdannonlinier1-181014044645-thumbnail.jpg?width=640&height=640&fit=bounds)







