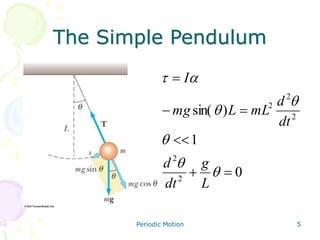
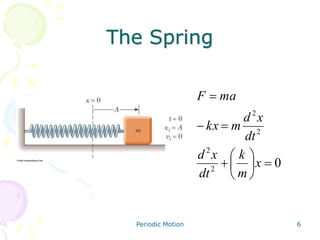
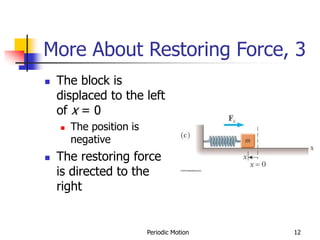
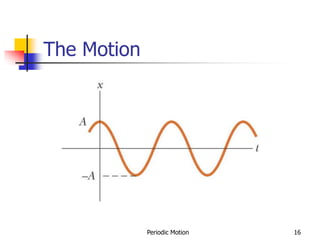
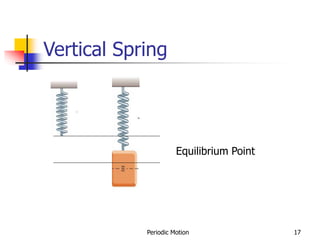
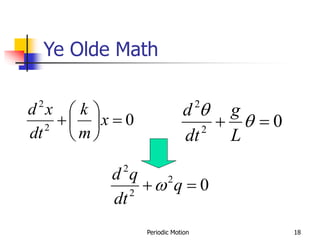
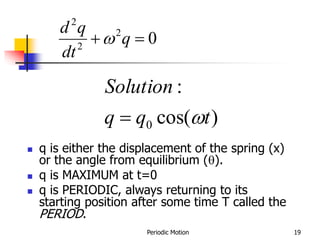
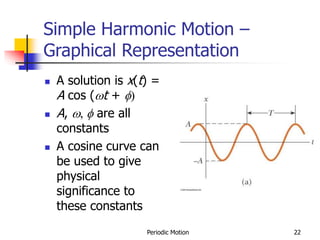
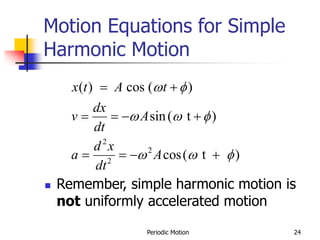
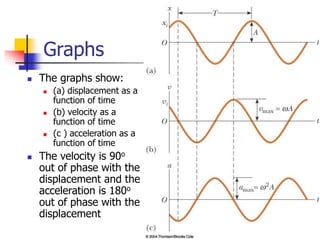
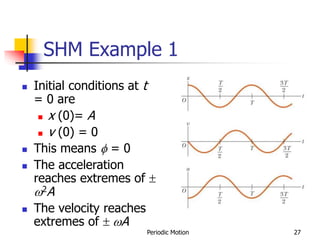
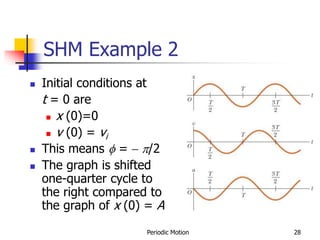
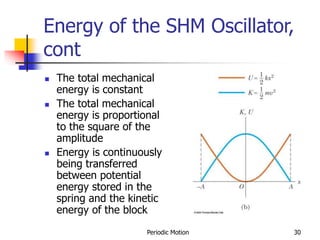
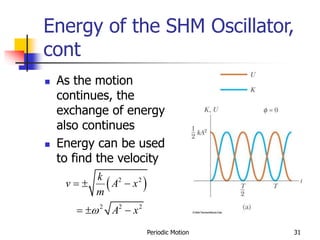
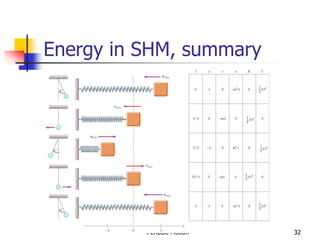
1) The document discusses periodic motion and simple harmonic motion. It provides equations and graphs describing the displacement, velocity, and acceleration of objects undergoing SHM.
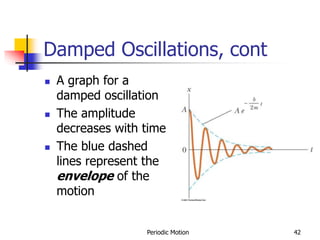
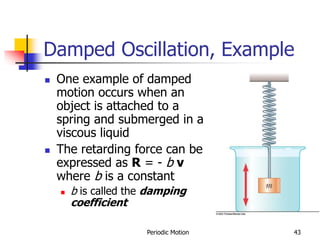
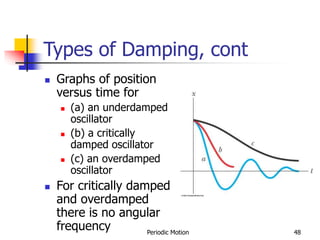
2) Damped oscillations are discussed where a damping force like friction causes the amplitude of the oscillations to decrease over time as the mechanical energy is dissipated.
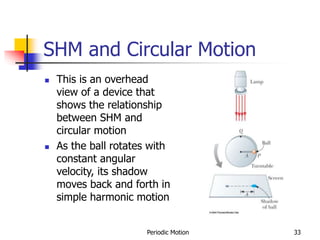
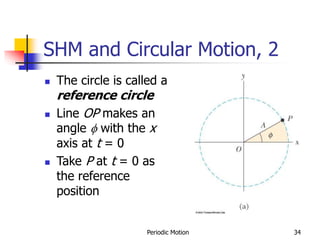
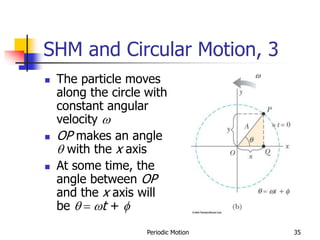
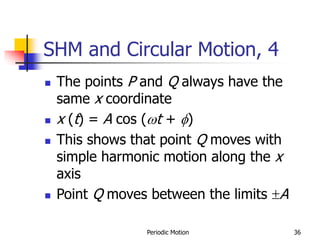
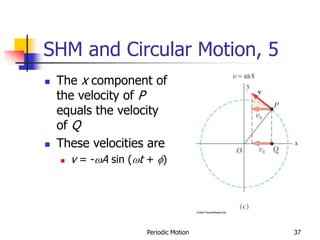
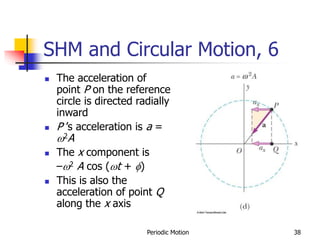
3) The relationship between SHM and circular motion is explained where the x-component of uniform circular motion traces out a simple harmonic pattern.