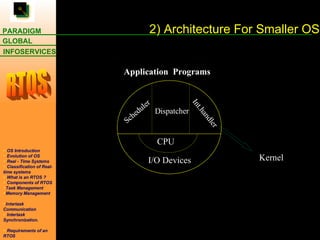
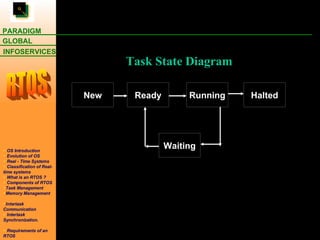
The document discusses real-time operating systems (RTOS). It defines what an RTOS is and its key components: task management, memory management, intertask communication, and intertask synchronization. It also outlines the requirements of an RTOS, including being multi-tasking, preemptible, supporting task priorities and synchronization mechanisms, avoiding priority inversion, and being deterministic.















































![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)






















































