This document provides an overview of real-time operating systems (RTOS) fundamentals. It discusses when an RTOS is appropriate, key RTOS concepts like tasks and scheduling, terminology, and factors to consider when choosing an RTOS for a project. The objectives are to understand RTOS terminology, functions, and how it affects programming style and to learn what to consider when selecting an RTOS.


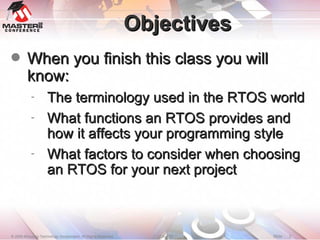
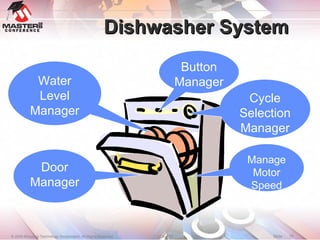
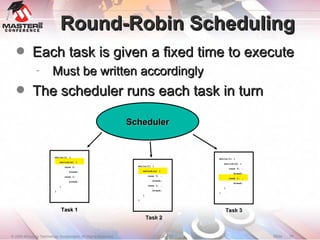
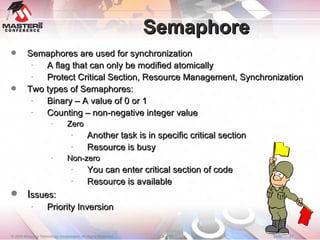
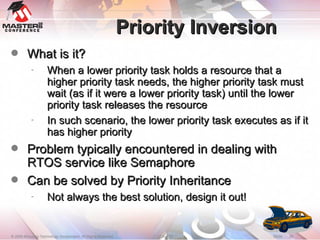
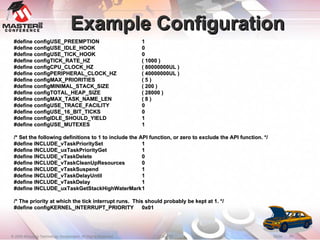
![Context Switches During a yield or pre-emption the task pushes the processor state The RTOS determines the next task to run The processor state is popped The next task runs int x; double y; char buff[2]; Task 1 int count; char ledState; Task 2 PC PSVPAG w0-w15 SR PC PSVPAG w0-w15 SR ?](https://image.slidesharecdn.com/1230rtffinal-1234399455361559-1/85/1230-Rtf-Final-21-320.jpg)
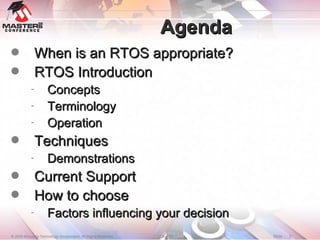
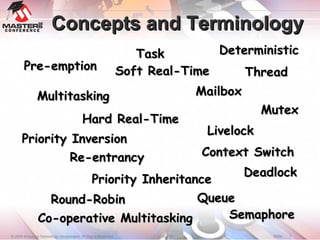
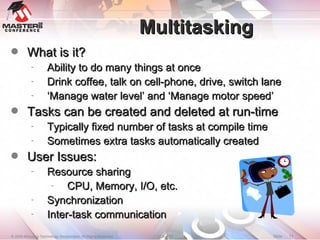
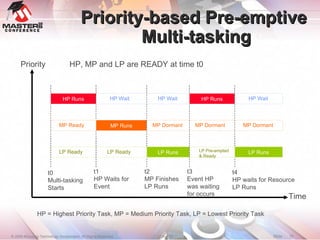
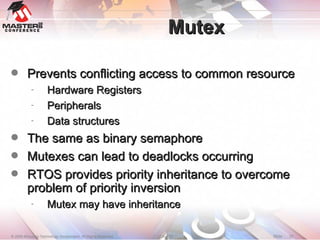
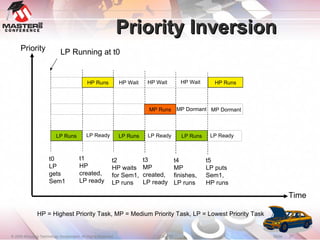
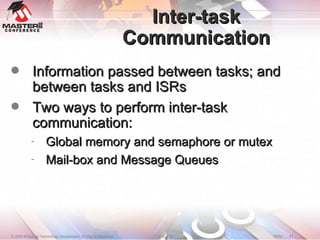
![Example PIC24F #define portRESTORE_CONTEXT() \ asm volatile("MOV _pxCurrentTCB, W0 \n“ \ "MOV [W0], W15 \n“ \ "POP W0 \n“ \ "MOV W0, _uxCriticalNesting \n“ \ "POP PSVPAG \n“ \ "POP CORCON \n“ \ "POP TBLPAG \n“ \ "POP RCOUNT \n“ \ "POP W14 \n“ \ "POP.D W12 \n“ \ "POP.D W10 \n“ \ "POP.D W8 \n“ \ "POP.D W6 \n“ \ "POP.D W4 \n“ \ "POP.D W2 \n“ \ "POP.D W0 \n“ \ "POP SR " ); #define portSAVE_CONTEXT() \ asm volatile( "PUSH SR \n“ \ "PUSH W0 \n“ \ "MOV #32, W0 \n“ \ /*disable INTs*/ "MOV W0, SR \n“ \ "PUSH W1 \n“ \ "PUSH.D W2 \n“ \ "PUSH.D W4 \n“ \ "PUSH.D W6 \n“ \ "PUSH.D W8 \n“ \ "PUSH.D W10 \n“ \ "PUSH.D W12 \n“ \ "PUSH W14 \n“ \ "PUSH RCOUNT \n“ \ "PUSH TBLPAG \n“ \ "PUSH CORCON \n“ \ "PUSH PSVPAG \n“ \ "MOV _uxCriticalNesting, W0 \n“ \ "PUSH W0 \n“ \ "MOV _pxCurrentTCB, W0 \n“ \ "MOV W15, [W0] ");](https://image.slidesharecdn.com/1230rtffinal-1234399455361559-1/85/1230-Rtf-Final-22-320.jpg)
































































![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)


















![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)

