Downloaded 1,329 times

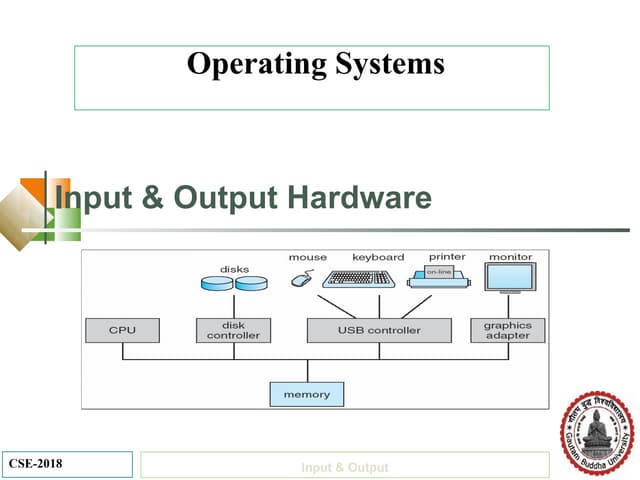
![Device Drivers can provide a level of security as they can run in kernel-mode, thereby protecting the operating system from applications running in user-mode. Why a device driver ? .. [contd.] Ring 0 Kernel Ring 1 Ring 2 Ring 3 Device Drivers Device Drivers Applications Lest Privileged Most Privileged Privilege rings available](https://image.slidesharecdn.com/devicedrivers-090315143443-phpapp01/85/Device-Drivers-5-320.jpg)
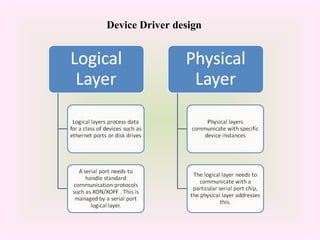
![Device Driver Design …[Contd.]](https://image.slidesharecdn.com/devicedrivers-090315143443-phpapp01/85/Device-Drivers-7-320.jpg)












The document discusses device drivers and their modeling for real-time schedulability analysis. It provides an overview of device drivers, their design and how they interact with hardware and operating systems. It then discusses challenges device drivers pose for real-time systems, where all tasks must complete within specified time constraints. It presents an analysis of the Linux e1000 network interface driver as a case study and references additional resources on the topic.