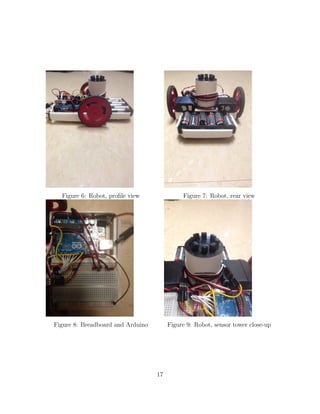
This document summarizes a college project to build an Arduino-based robot that can track and follow an infrared LED. The robot uses an array of 8 infrared sensors connected to an Arduino Uno microcontroller. The Arduino processes the sensor data and controls two continuous rotation servomotors that drive the wheels. Testing showed the robot could track the infrared LED from up to 14 meters away. Issues with sensor field of view and reflective surfaces hindered tracking at close ranges. Adding distance sensors was proposed to help with navigation if the infrared signal is lost. The overall goal of building a robot capable of infrared tracking and following was accomplished.