Downloaded 24 times
![ Convolution Sum
• Misal sebuah sinyal x[n] dikalikan dengan sekuen impulse d[n]
x[n]d[n] = x[0]d[n]
• Bila digeneralisir menjadi product of x[n] dan suatu time-
shifted impulse sequence, untuk mendapatkan:
x[n]d[n-k] = x[0]d[n-k]
n time indek, x[k]
suatu nilai spesifik pada x[n] untuk waktu k. Maka ekpresi x[n]:
k
knkxny ][][][ d](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-7-2048.jpg)
![• Jika dikaitkan dengan operator H pada sistem yang diberi input x[n], maka:
• Sifat linearity bisa menukar posisi operator H
• Bisa juga dilanjutkan sebagai:
Persamaan ini menggambrkan respon lengkap yang mencirikan perilaku
input-output, dan merupakan sifat fundamental dari sistem linear.
knnxH
nxHny
d
knnxHny d
knHnxny d
time-shifted
weighted sum
impulse](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-8-2048.jpg)
![Contoh 1:
Suatu sistem memiliki hubungan input-output sebagai:
Dapatkan output sistem untuk input sbb:
Solusi :
Diawali dengan x[n]= d[n], akan diperoleh:....
1
2
1
nxnxny
lainyangn
n
n
n
nx
;0
2;;2
1;4
0;2
lainyangn
n
n
nh
;0
1;
2
1
0;1
..0 1 2 3 4 5 n
1
1/2](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-10-2048.jpg)
![Cara sederhana kita juga memiliki (dari input x[n])
x[n] sebagai weighted sum of time-shifted impulse
Output bisa dihitung sbb:
Dan bis a dituliskan sbb:
22142 nnnnx ddd
-1 0 1 2 3 4 5 n
2
4
x[n]
-2
032144
11022133
02212122
51402111
212100
xxy
xxy
xxy
xxy
xxy
4;0
3;1
2;0
1;5
0;2
0;0
n
n
n
n
n
n
ny
-1 0 1 2 3 4 5 n
2
5
y[n]
-1](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-11-2048.jpg)
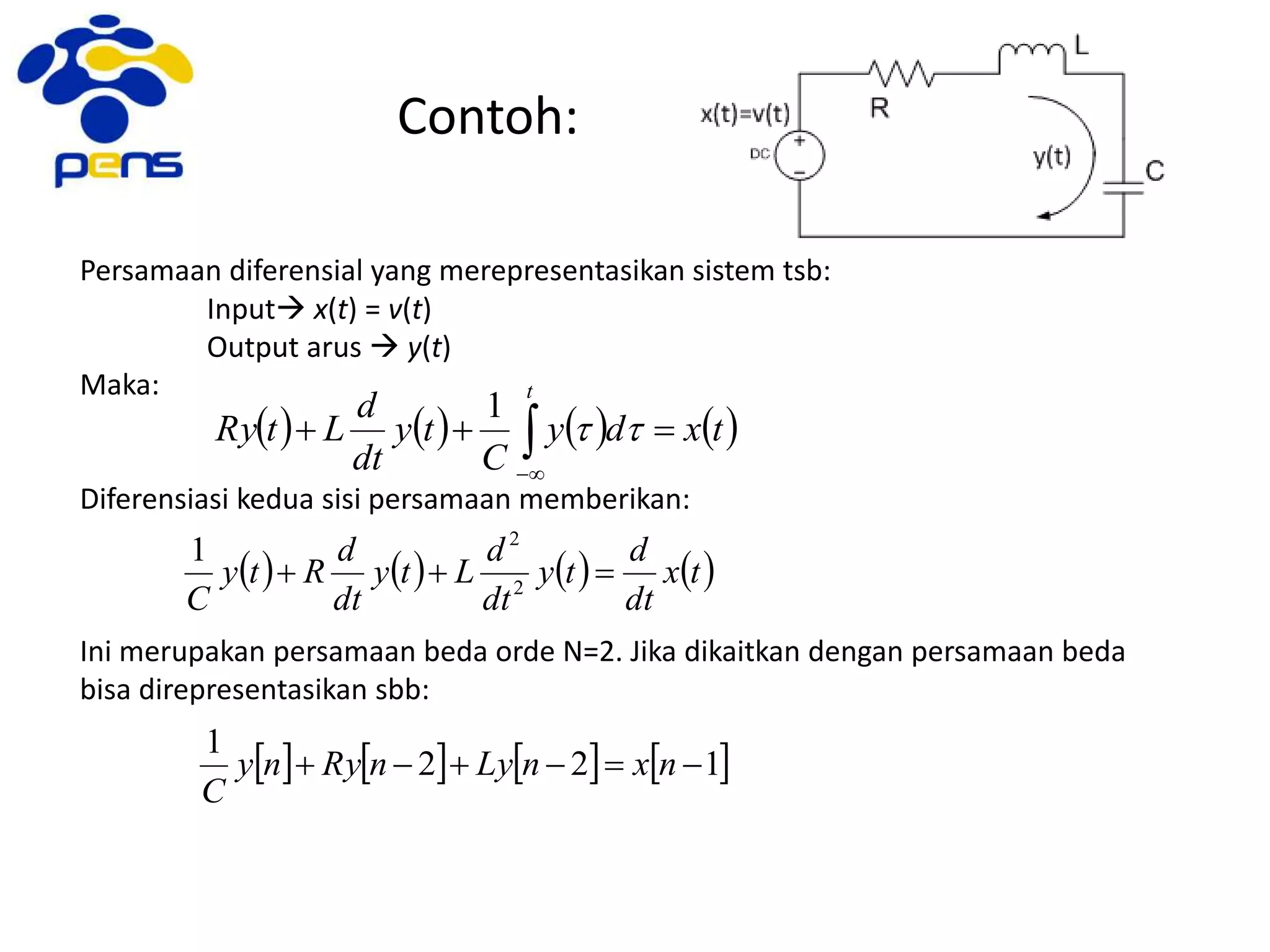
![4.3. Perilaku Hubungan Input-Output
pada Persamaan Beda
Hubungan input-output pada sistem LTI bisa direpresentasikan dalam bentuk:
• Persamaan beda discrete time
• Persamaan differensial continuous time
Bentuk umum persamaan beda:
di mana ak dan bk adalah koefisien-koefisien pada sistem, dan x[n] adalah
input, sedang y[n] adalah output.
Bentuk derivative:
Digantikan sebagai bentuk operator delay.
M dan N menyatakan orde pada persamaan beda, yang
merepresentasikan jumlah energy storage device di dalam sistem.
M
k
k
N
k
k knxbknya
00
knxtx
dt
d
knyty
dt
d
k
k
k
k
](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-16-2048.jpg)
![3 elemen dasar operasional pada diagram blok:
• Operasi perkalian (skalar)
• Addition
• Integrasi (waktu kontinyu)
Untuk waktu diskrit, operasi integral bisa dikaitkan dengan pergeseran atau delay (diferensial)
ncxnyatautcxty
nwnxny
atau
twtxty
x(t)
x[n]
y(t)
y[n]
c
nxatautx
nwatautw
nyatauty
x(t) y(t) x[n] x[n-1]
D
x[n] x[n-1]
z-1](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-19-2048.jpg)
![contoh:
Suatu sistem dinytakan dalam persamaan beda sbb:
Sementara:
Maka persamaan tsb dapat dinyatakan sbg:
Di dalam bentuk diagram blok dapat digambarkan sbb:
21 210 nxbnxbnxbnw
Gambarkan diagram
bloknya… 21 21 nyanyanwny
2121
2121
21021
21210
nxbnxbnxbnyanyany
nyanyanxbnxbnxbny
x[n]
x[n-1]
D
b0
x[n-1]
D
b1
b2
D
D
a1
a2
y[n]
y[n-1]
y[n-1]
Direct Form I](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-20-2048.jpg)
![Atau bisa disederhanakan lagi
x[n]
D
b0
D
-a1
-a2
b1
b2
y[n]](https://image.slidesharecdn.com/modulajardsp2020-bab4sistemlineartimeinvariant-200607140735/75/Modul-ajar-dsp_2020-bab_4_sistem-linear-time-invariant-21-2048.jpg)

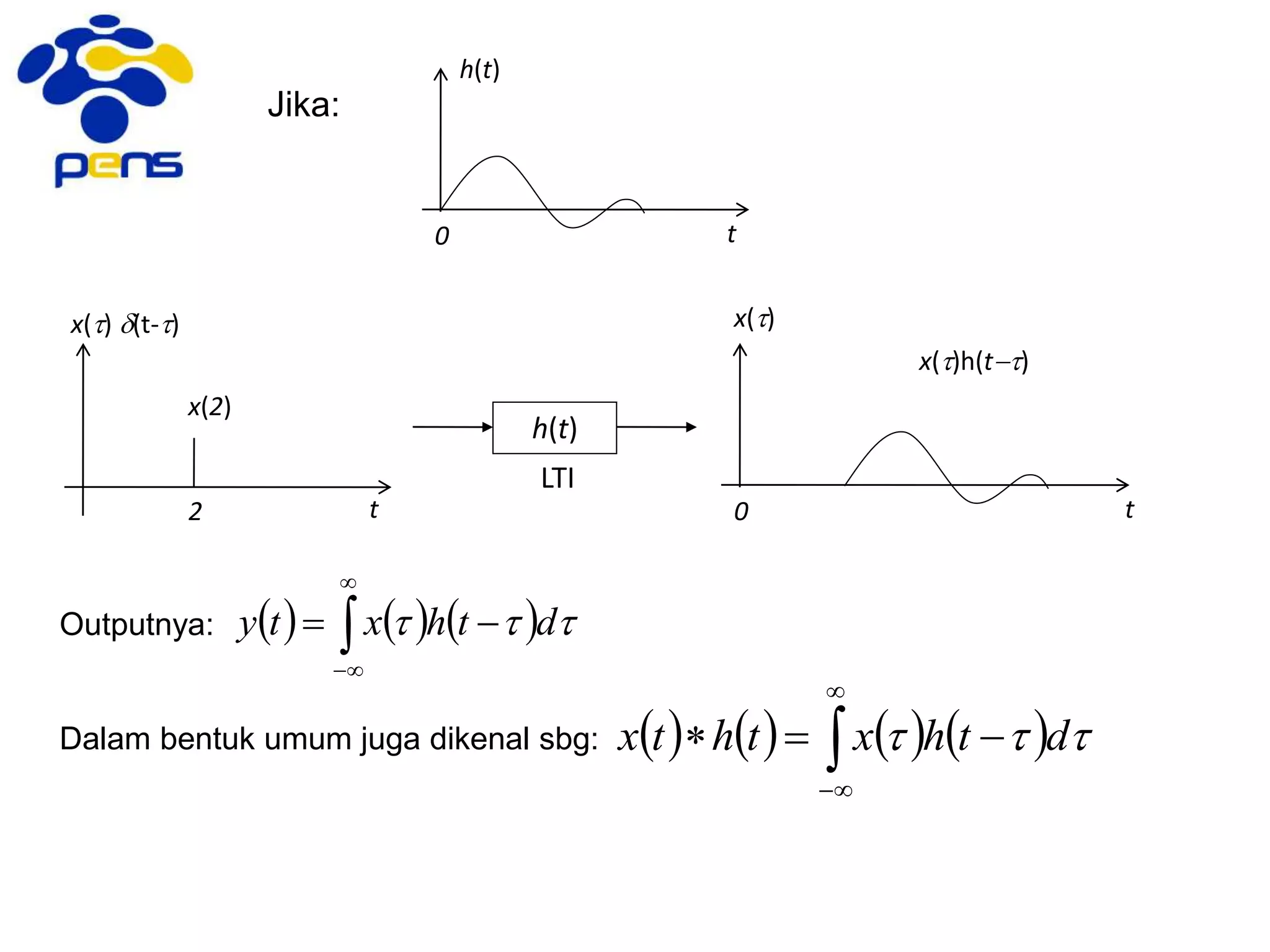
Dokumen ini membahas tentang konsep dasar sistem Linear Time Invariant (LTI) dalam pengolahan sinyal digital. Materi meliputi analisis respon impulse, perilaku hubungan input-output melalui persamaan beda dan representasi diagram blok. Tujuan pembelajaran adalah agar mahasiswa mampu menjelaskan dan mengimplementasikan sistem LTI.












































































