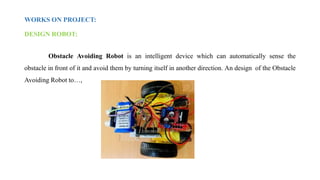
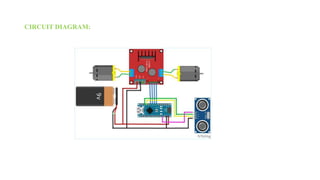
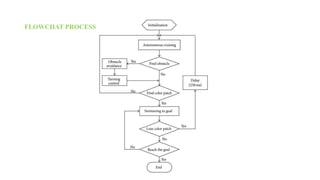
This document describes the design of an obstacle avoiding robot. It uses ultrasonic sensors and an Arduino microcontroller to detect obstacles and navigate around them autonomously. The hardware components include ultrasonic sensors, an L293D motor driver, DC motors, and an Arduino Uno. The robot is programmed using the Arduino IDE to scan its surroundings with the ultrasonic sensors, detect any obstacles, and maneuver around them by controlling the motors. The goal is to create a robot that can intelligently avoid obstacles on its own without human guidance.