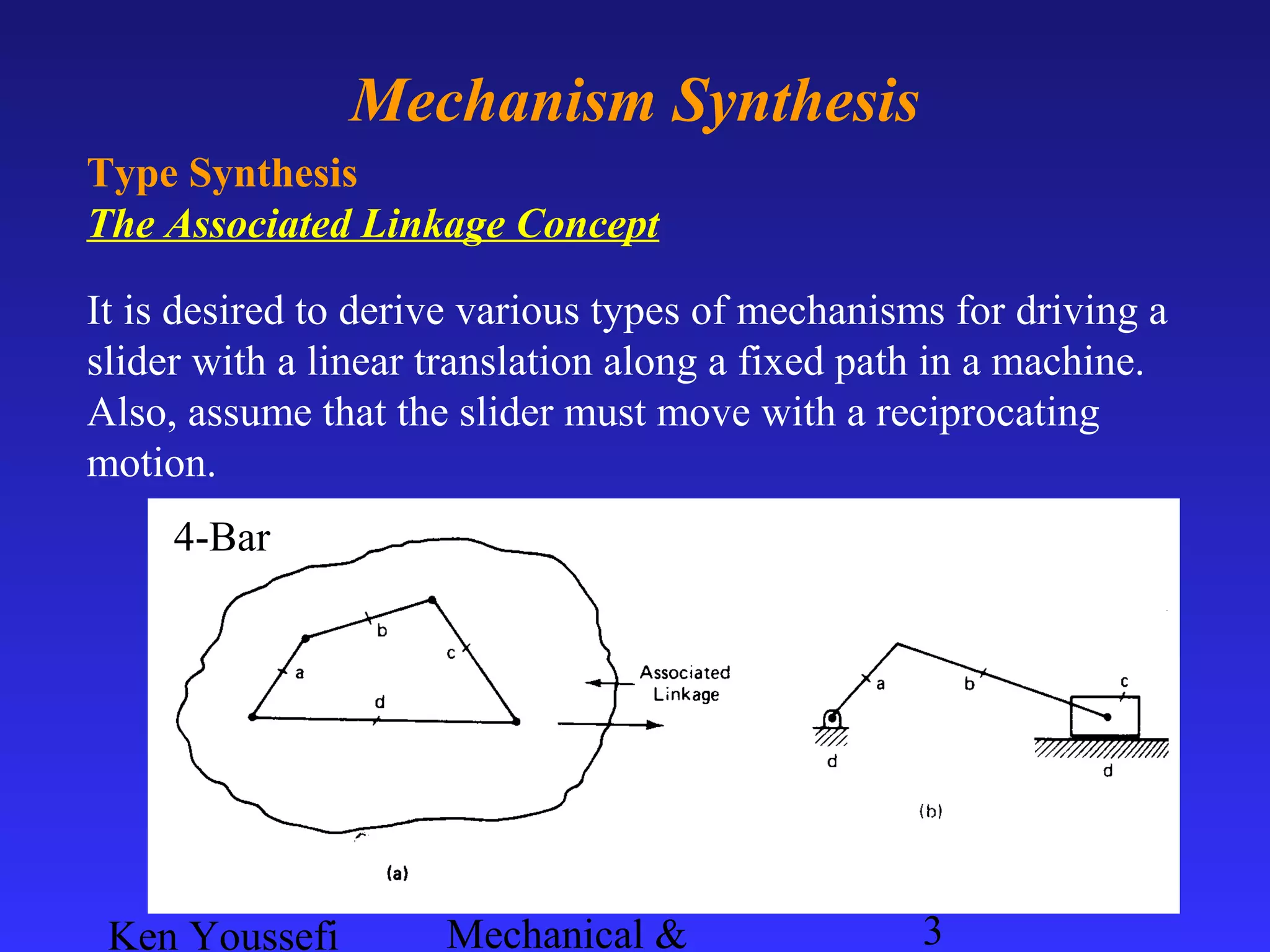
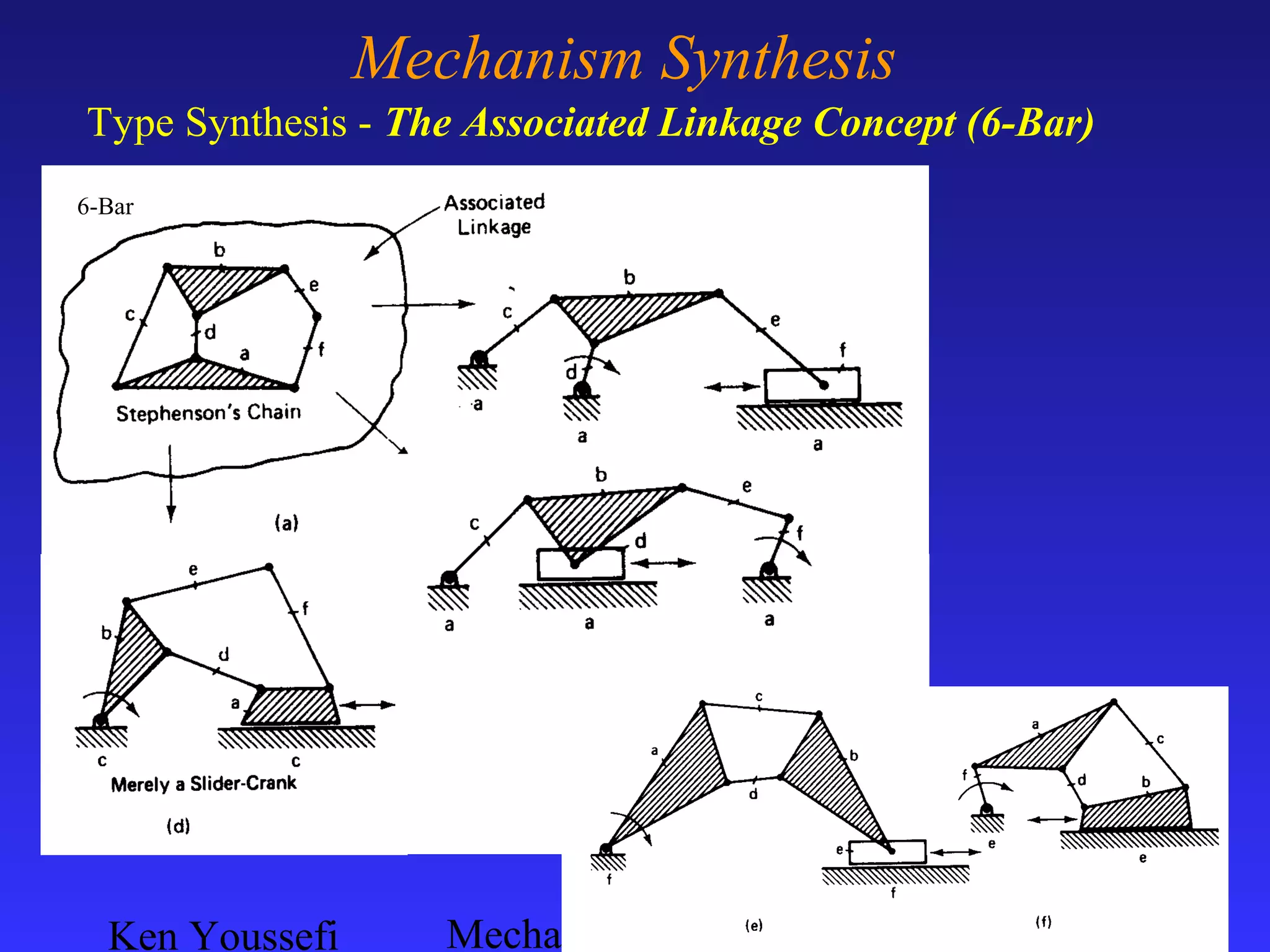
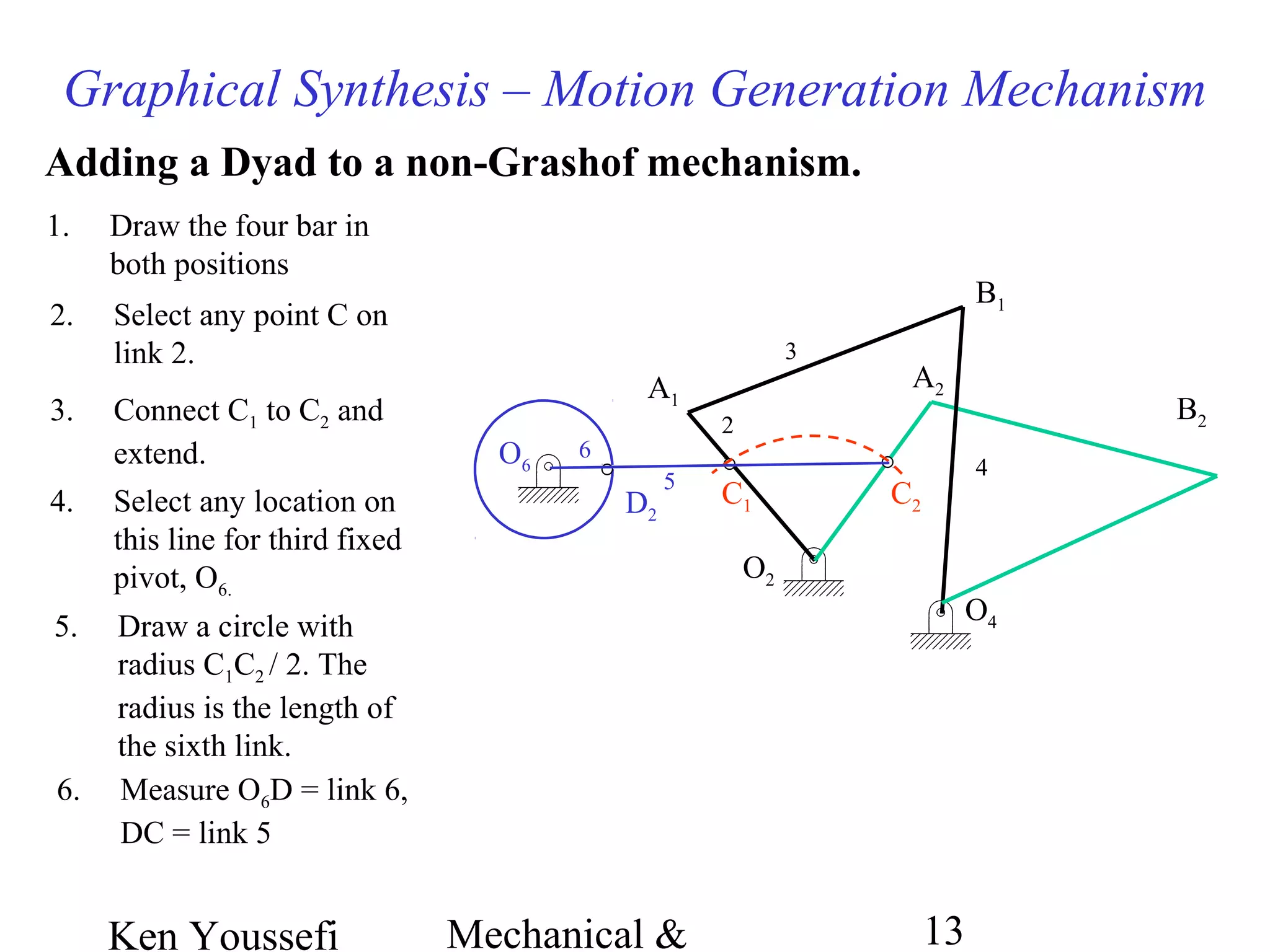
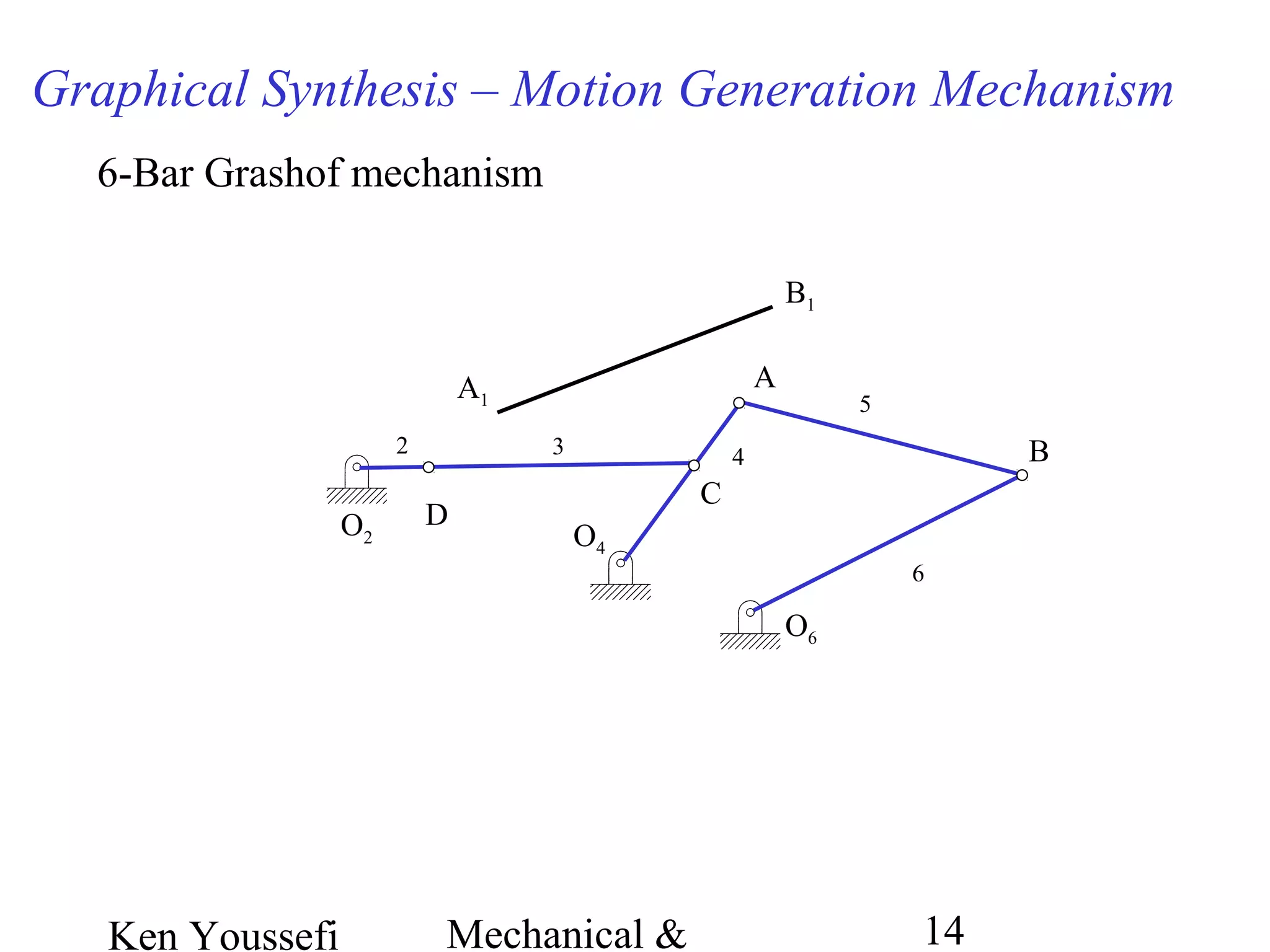
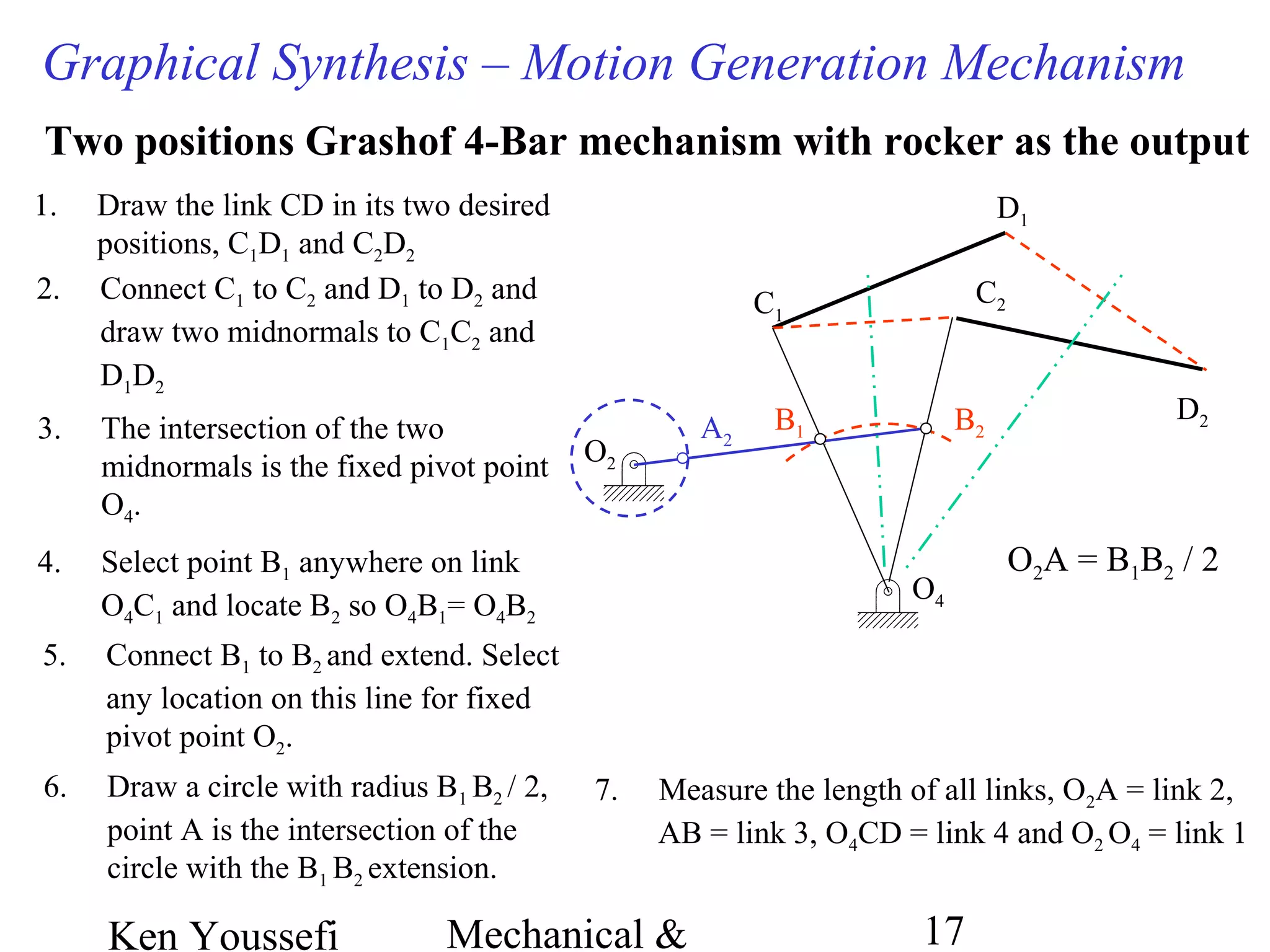
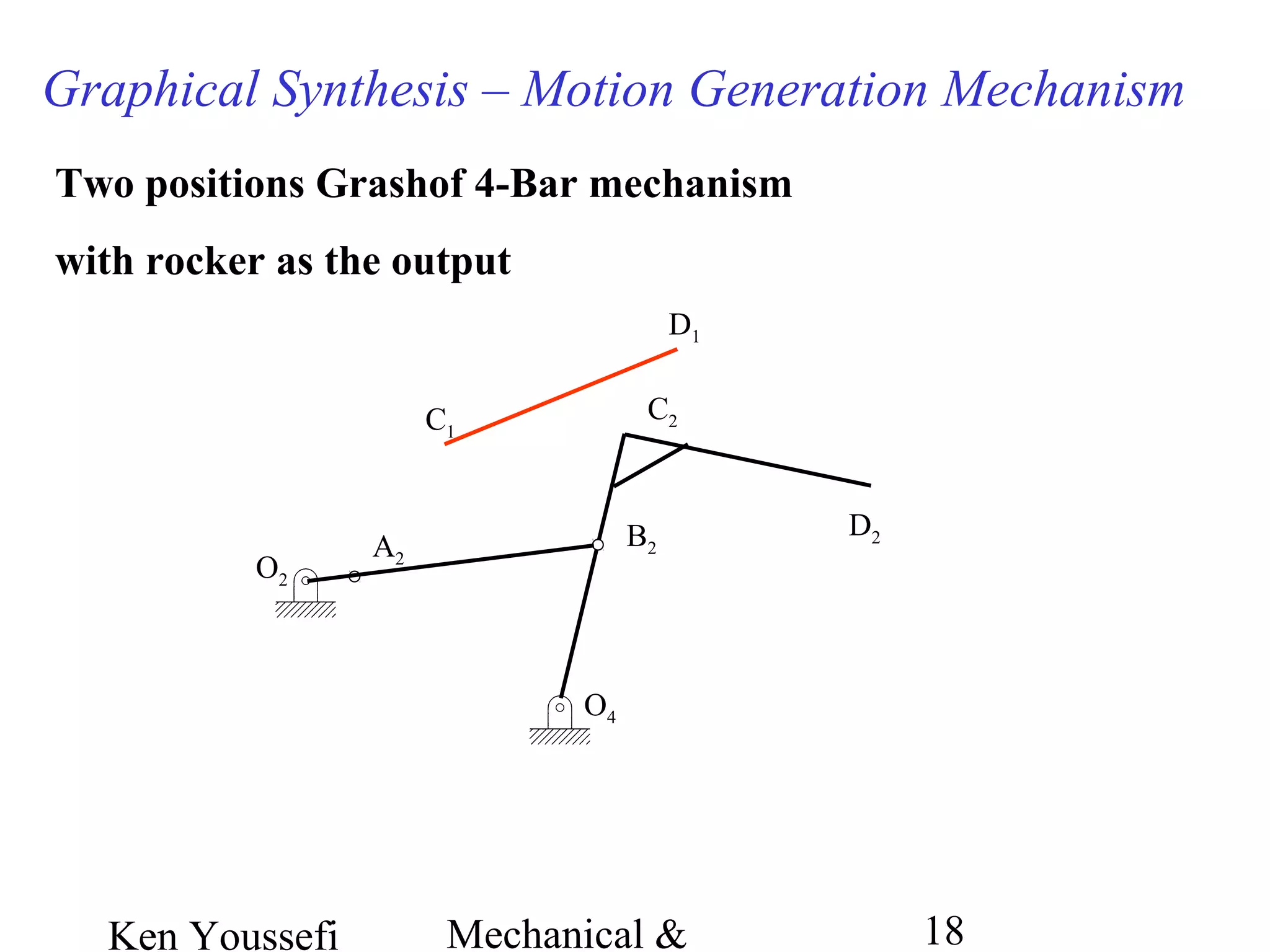
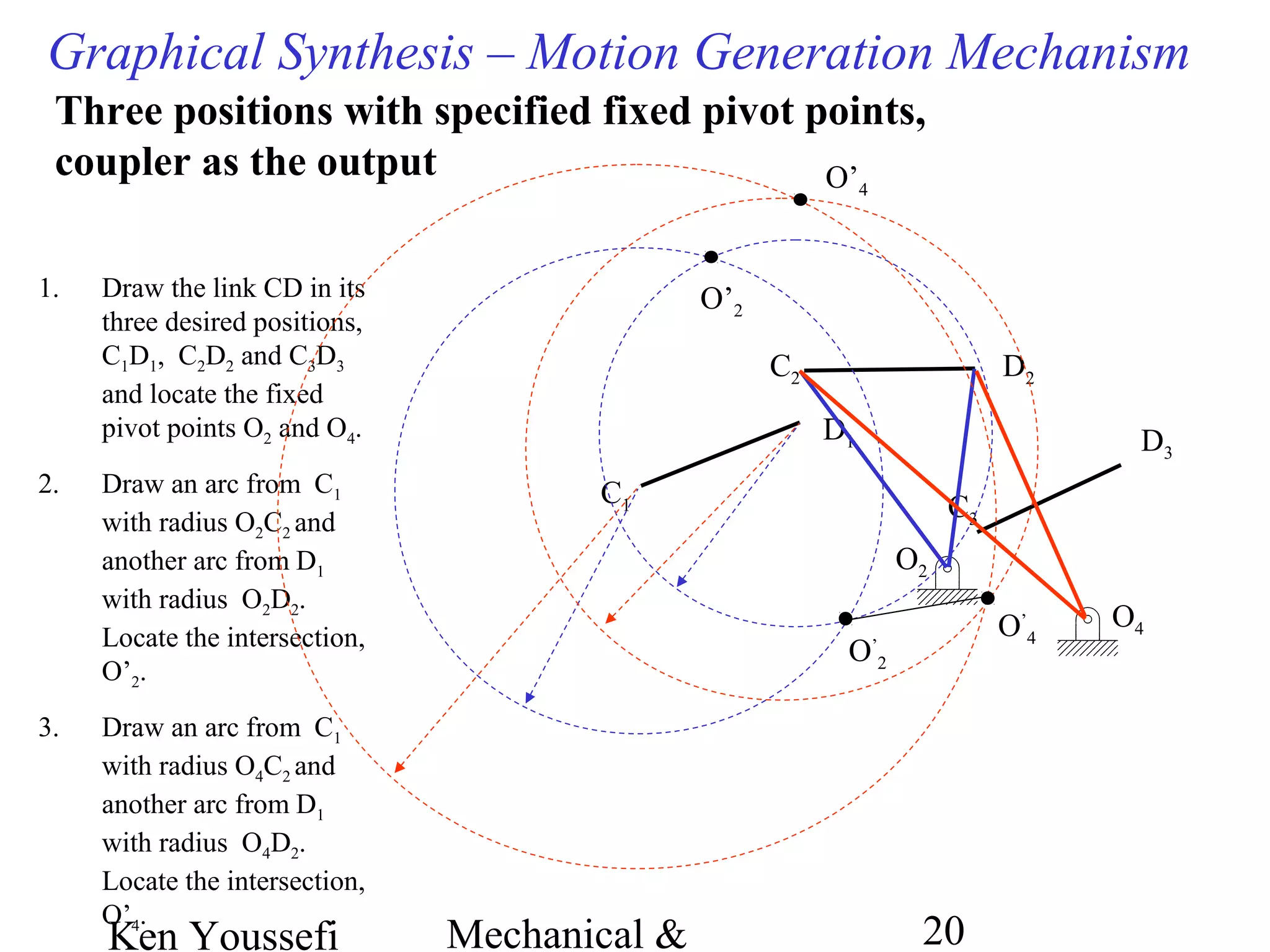
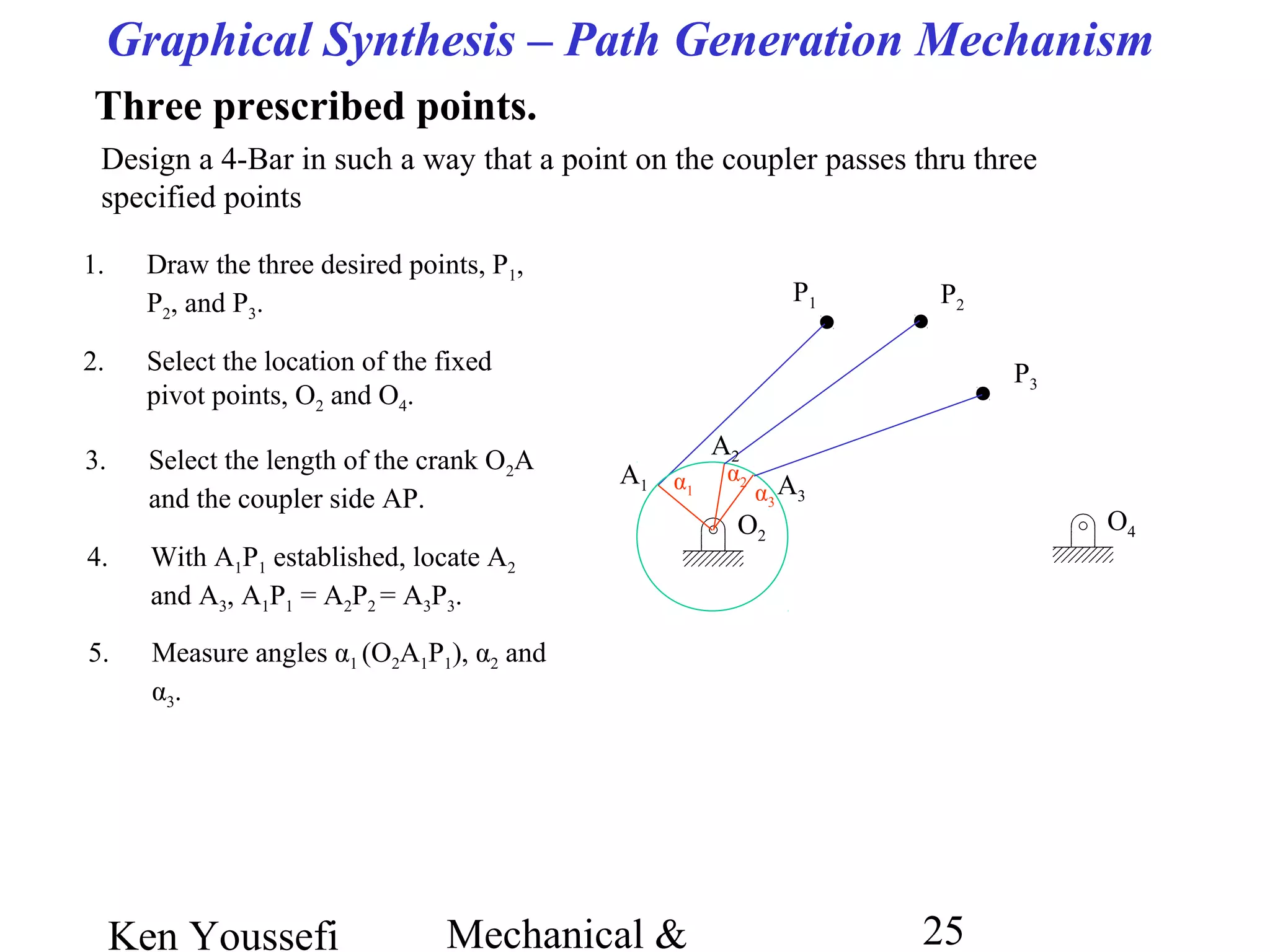
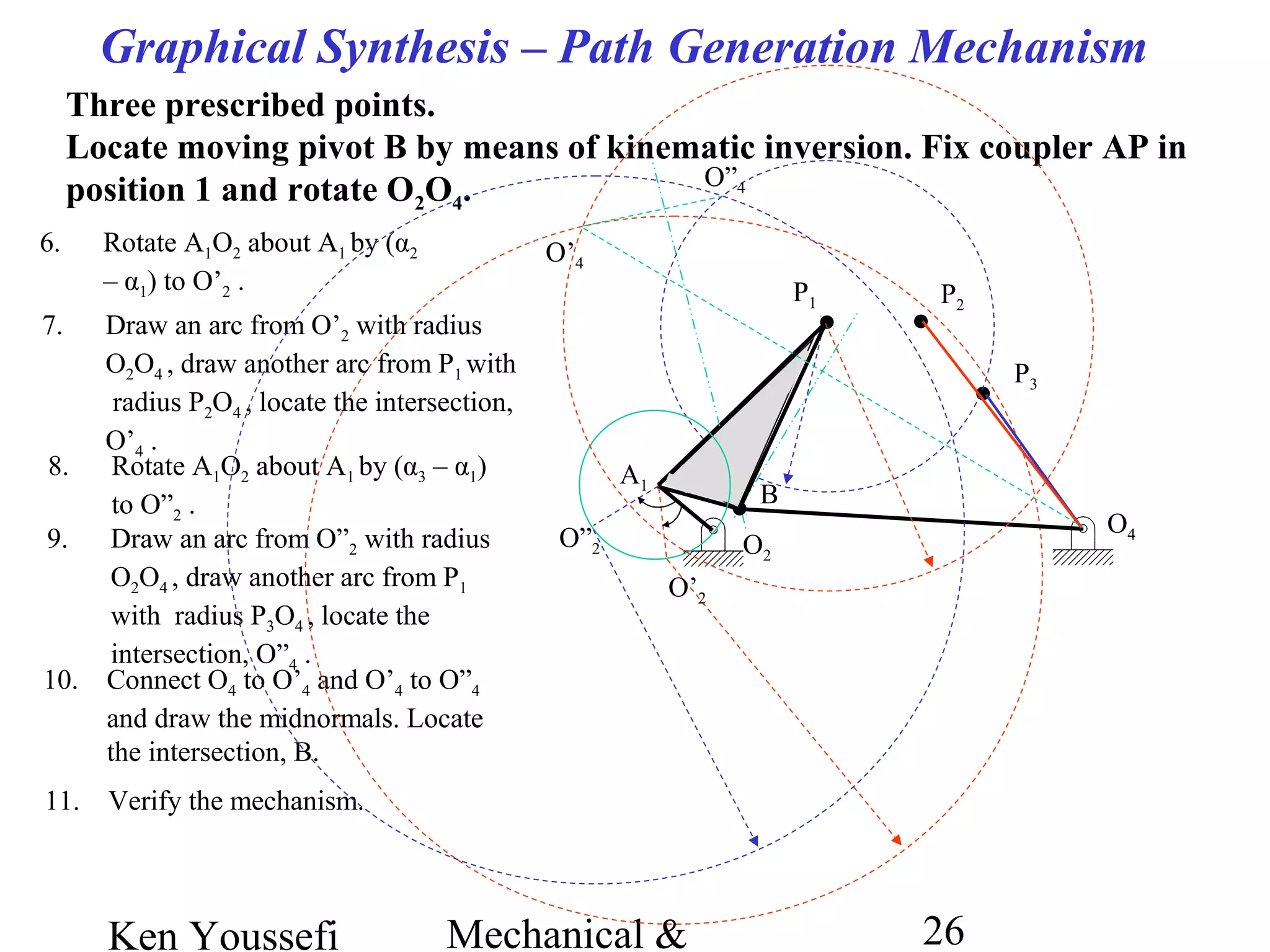
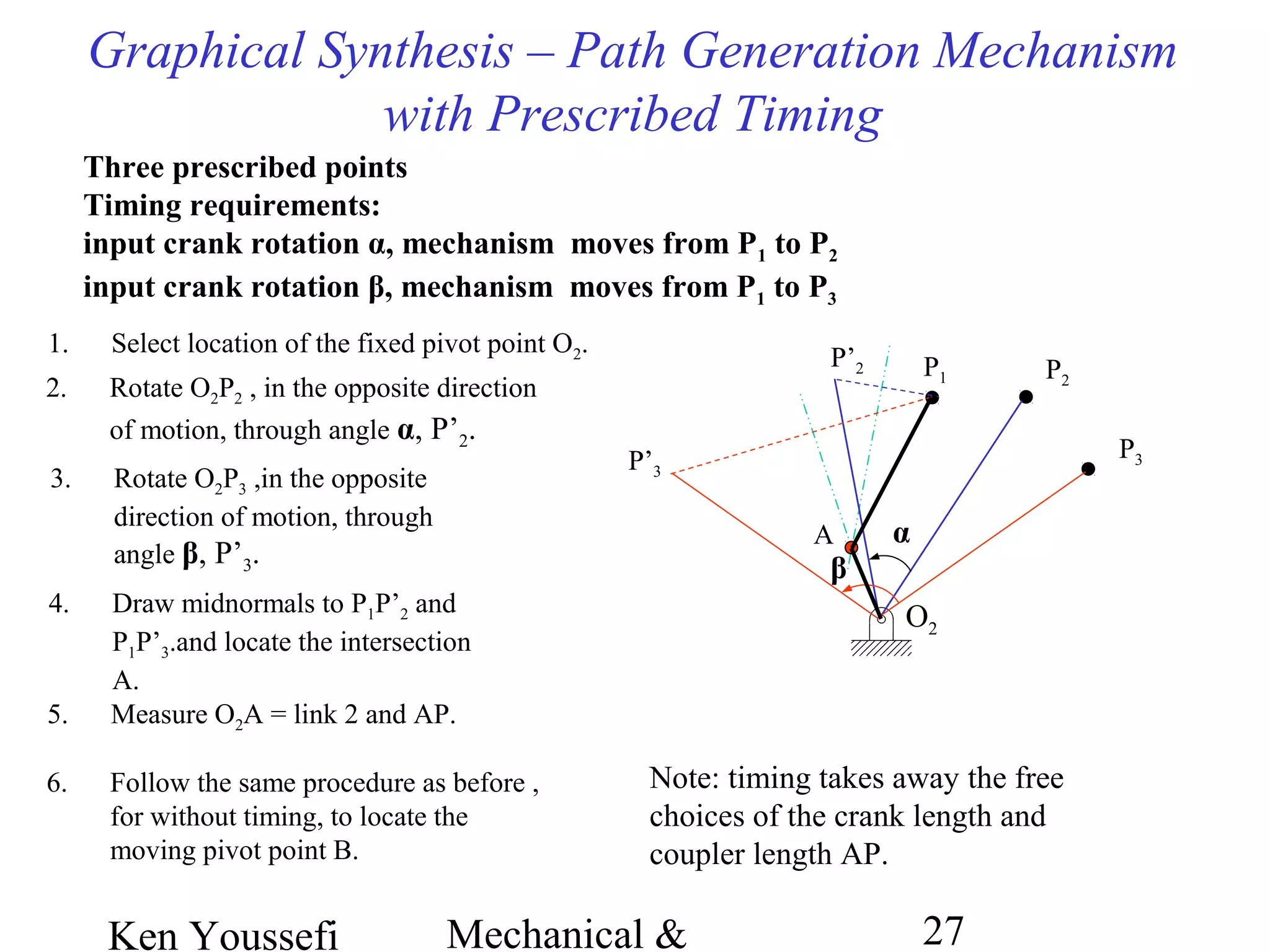
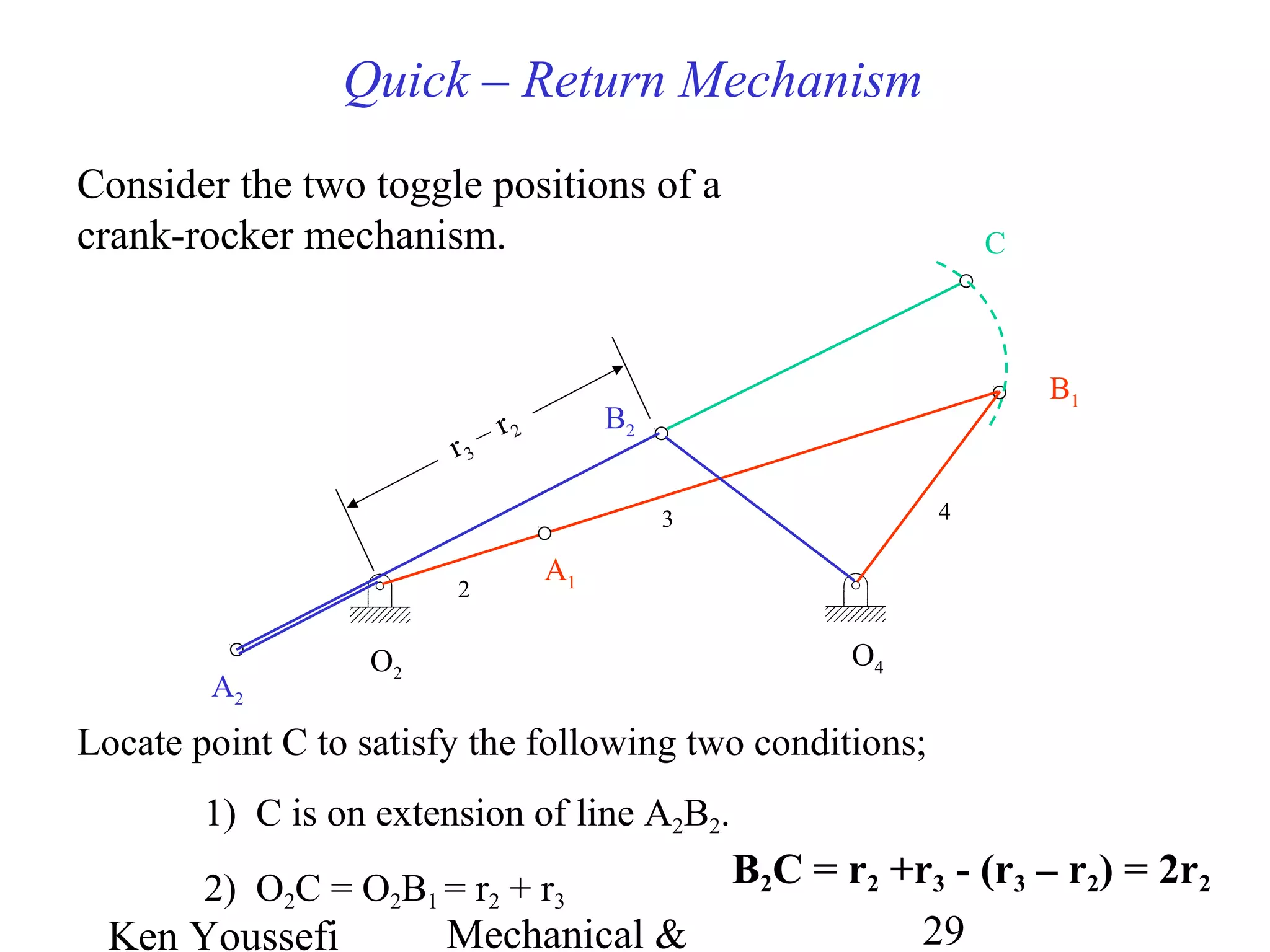
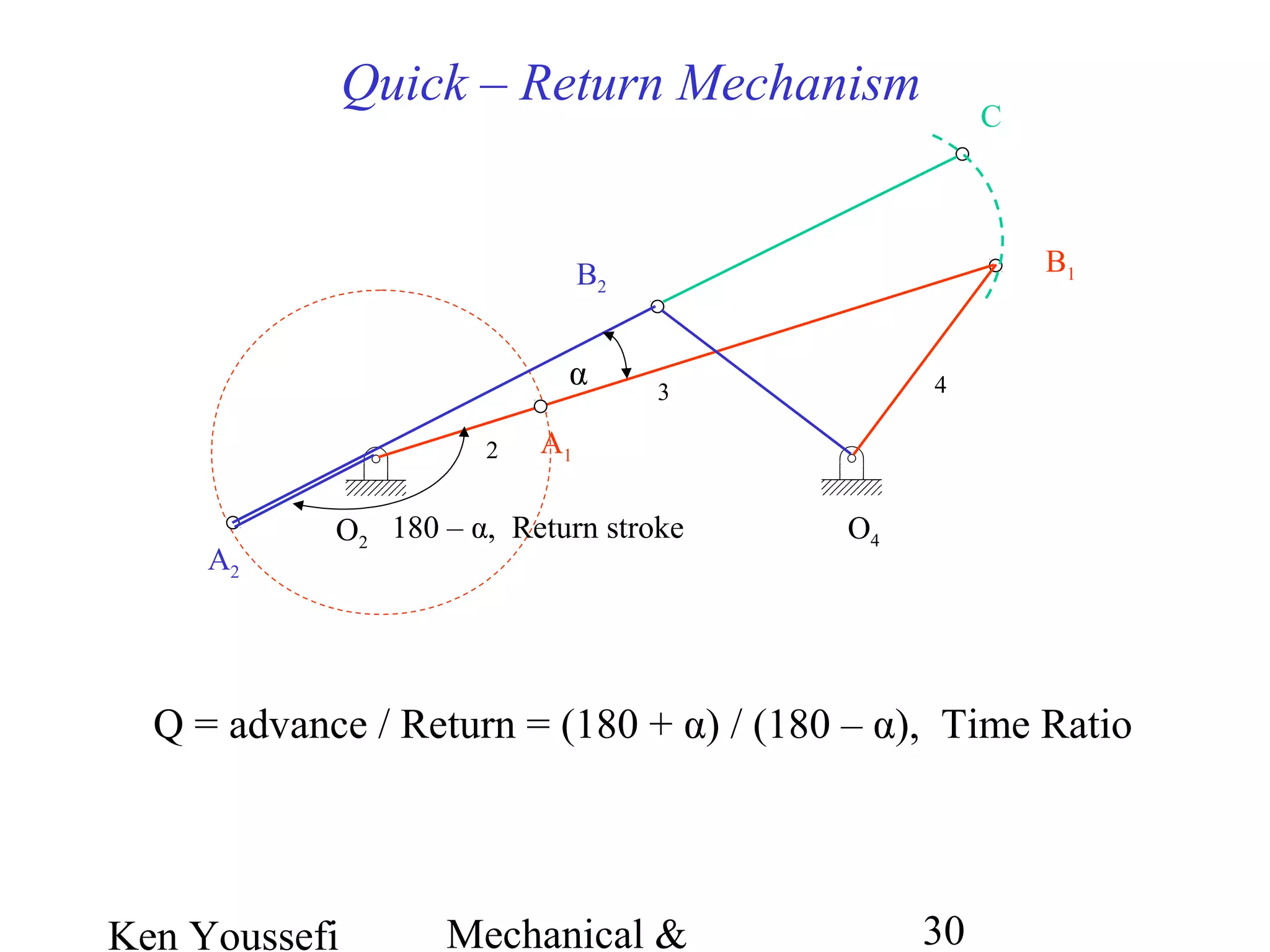
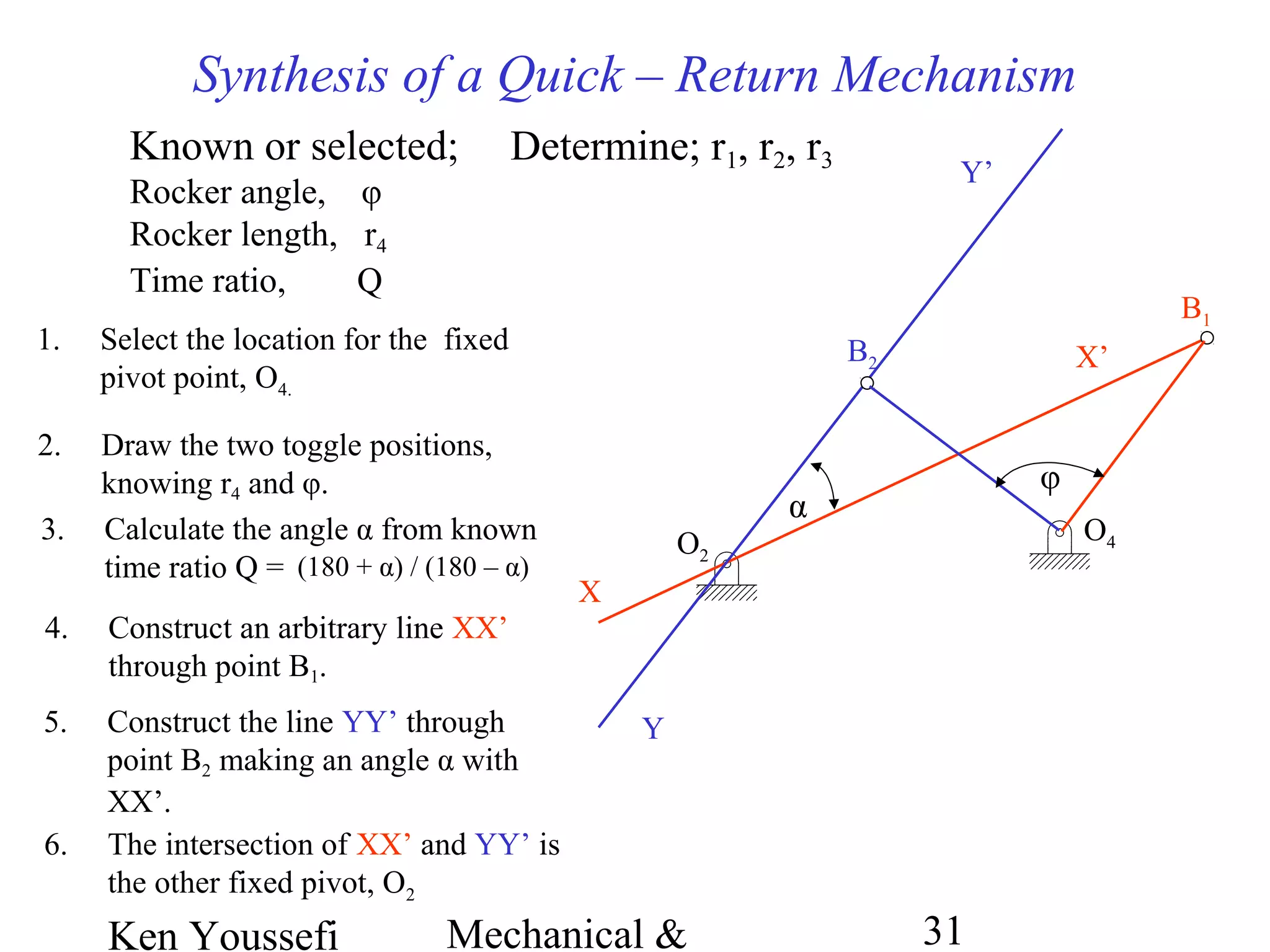
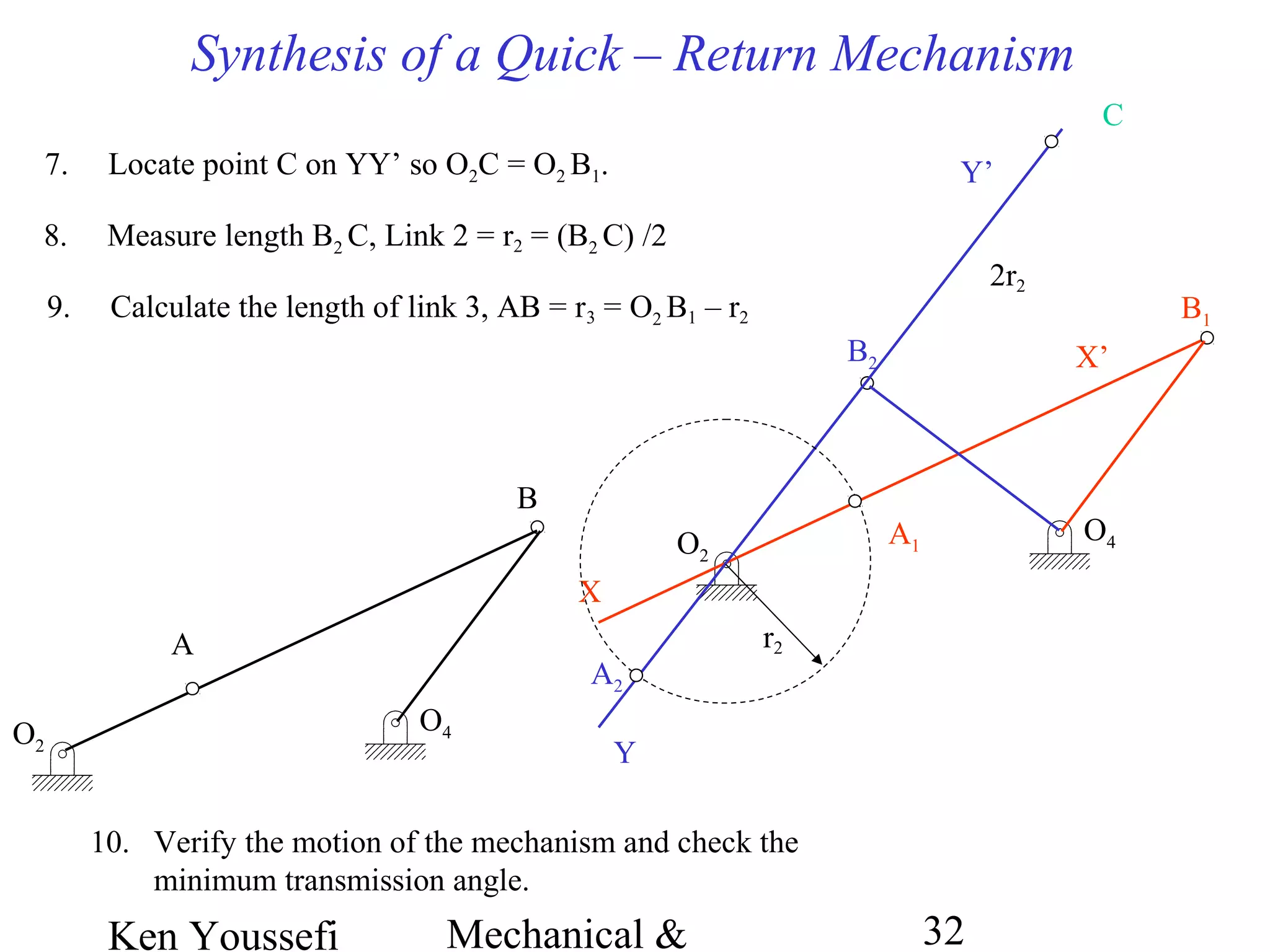
This document provides information on mechanism synthesis and graphical methods for designing mechanisms. It discusses dimensional, number, and type synthesis to design mechanisms for specified motions. Graphical methods are presented for generating both motion and path generating mechanisms with 4-bar and 6-bar linkages using coupler curves. Steps are provided for graphical synthesis including selecting fixed pivot points, locating link lengths, and verifying mechanism positions. Quick-return mechanisms are also discussed.


































![[IJET-V1I6P7] Authors: Galal Ali Hassaan](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i6p7-151213092439-thumbnail.jpg?width=640&height=640&fit=bounds)
































